Шагающий грузовик
В детстве вы, наверное, пробовали ходить на ходулях. Длинная палка, к ней на некоторой высоте прикреплена опорная площадка для ноги - вот вся нехитрая конструкция ходули.
Оказывается, ходить на ходулях легче, чем стоять на месте. Новичок, чтобы сохранить равновесие, вынужден все время двигаться, хаотически переступая вперед и назад, смещаясь вправо и влево. Даже опытный «ходульных дел мастер» - цирковой артист, исполняя номера, связанные с поддержанием равновесия, непрерывно перемещается.
Можно усложнить конструкцию ходули, снабдив ее двухзвенным механизмом, имитирующим бедро и голень ноги. Связав две такие ходули общей площадкой, можно построить двуногий шагающий механизм. Для привода в движение механических ног можно использовать внешние источники мощности, например электро- или гидропривод, а за человеком оставить функции управления. В результате получится двуногая шагающая машина.
Все бы хорошо, но управление ею займет внимание оператора в течение всего периода пользования, независимо от того, движется он с машиной или пытается стоять на месте: он не сможет ни на секунду отвлечься от непрерывного балансирования. И пожалуй, самый главный довод против двуногих шагающих машин заключается в том, что если привод одной из ног внезапно выйдет из строя и это произойдет, когда вторая нога в воздухе, то катастрофа становится неизбежной.
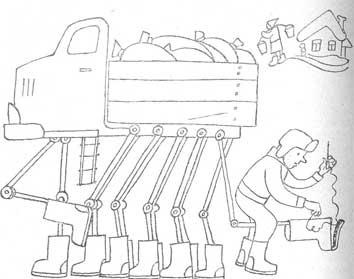
В созданиях живой природы проглядывает определенная закономерность: чем ниже организация животного, тем большим количеством ног оно располагает. Насекомому природой дано шесть ног, стопоходящему животному - четыре ноги, «венцу творения» - человеку - две. При создании шагающих машин пришлось пойти примерно по тому же пути - делать число ног тем большим, чем ниже уровень организации машины. Начнем ознакомление со стопоходящими машинами с четырехногой машины, которую иногда называют шагающим грузовиком, иногда механической лошадью. Машина, построенная в США, весит около 1,5 тонны, ее длина достигает 3,5 метра, высота 3 метров, длина ноги 2,3 метра. Она снабжена 90-сильным автомобильным двигателем, приводящим гидронасос, питающий гидродвигатели механизмов ног.
Каждая из ног представляет собой трехзвенный рычаг или трехзвенный манипулятор, все звенья которого движутся в одной плоскости. Движение каждого из сочленений осуществляется отдельным приводом. Оператор располагается в кабине, помещающейся в центральной части машины, руками он управляет передними ногами машины. Управление сводится к тому, что оператор как бы ходит в кабине, двигая в некоторой привычной ему последовательности руками и ногами, причем руками он держит рукоятки, а ноги его стоят я на педалях.
Одновременно с движениями рукояток и педалей, воздействующих на гидромеханические сервосистемы, начинают двигаться ноги механической лошади, грузоподъемность которой достигает 500 килограммов, а скорость 10 километров в час. Оператор управляет одновременно 12 приводами и естественным образом может изменять длину шагов и темп движения «лошади». Все каналы управления обратимы - оператор чувствует т сопротивление почвы, когда на нее становится нога машины, так, будто почвы касается непосредственно его нога.
Естественно, что управление такой машиной требует от оператора определенных навыков, начиная с выработки оптимальной походки.
Человек, счастливый обладатель всего лишь двух ног, не должен задумываться, какой ногой ему надо делать второй шаг, если первый шаг он сделал левой. Ясно, что второй шаг надо сделать правой, иначе он рискует оказаться в положении, которое занимает гимнаст, делая так называемый шпагат.
Лошадь или корова, сделав шаг, например, передней левой ногой, оказываются перед проблемой довольно обширного выбора, что делать дальше. Чтобы разобраться в этом, обозначим переднюю левую ногу механической лошади цифрой 1, переднюю правую - цифрой 2, заднюю правую - цифрой 3, заднюю левую - цифрой 4. Будем считать, что одновременно в воздухе может быть только одна нога, иначе машина может опрокинуться. Если перебрать все варианты переступания ногами, окажется, что возможны шесть видов походок, в зависимости от того, какой последовательности придерживаться:
Анализ показывает, что разным походкам свойственна различная степень устойчивости. Лошади и корове природа определила для медленной ходьбы, например, когда они передвигаются по пастбищу, походку типа 1-3-2-4, которая, как оказывается, обладает максимальной устойчивостью.
Шагающий грузовик построен давно и давно прошел испытания. Что они показали? Оператору удается одновременно управлять 12 сервосистемами и воспринимать и реагировать на 12 усилий, отраженных на его руки и ноги. К сожалению, нам неизвестно, какой из шести возможных походок пользовался оператор шагающего грузовика.
Чтобы управлять машиной, нужна тренировка, позволяющая оператору освоить ряд важных особенностей, значительно отличающих машинную походку от естественной.
Прежде всего существует рассогласование между управляющими движениями оператора и движениями ног машины, между моментом, когда сопротивления прикладываются к ее ногам и их подвижным сочленениям, и моментом, когда эти сопротивления чувствует оператор. Оператор сидит и поэтому испытывает при движении машины значительно меньшие усилия, чем их испытывает человек при ходьбе, когда воспринимает полностью вес своего тела. Наконец, движения оператора передаются ногам машины в четырехкратно увеличенном масштабе, то есть шаг машины в четыре раза больше шага оператора; чтобы при этом правильно соразмерять усилия и перемещения, тоже необходим навык.
Шагающий грузовик
Несмотря на все эти и другие особенности, усложняющие задачу оператора, опыты показали, что осуществить такой способ взаимодействия человека и машины можно. Повинуясь оператору, машина при испытаниях шла вперед и назад, поворачивалась на месте, балансировала на двух диагонально расположенных ногах, проходила через узкие проходы, тащила по полу груз весом полтонны, поднимала одной передней ногой груз в 200 килограммов, укладывала его на платформу автомобиля и т. д.
Человек и машина связаны в единый биотехнический агрегат. Ноги машины повторяют движения ног человека - выбор темпа движения, приспособление походки к словиям движения, соразмерение шагов с встречающимися на пути препятствиями, способы преодоления препятствий - все это определяет оператор. Его задачи примерно те же, что и при работе на копирующем манипуляторе.
Только вместо двух механических рук ему приходится управлять четырьмя механическими ногами, но зато каждая из ног движется проще 8 плоскости. Каждая из рук обычного копирующего манипулятора обладает шестью степенями свободы (исключая движение захвата), значит, управляя двумя руками манипулятора, оператору приходится иметь дело с 12 степенями свободы. В шагающем грузовике каждая из ног обладает тремя степенями свободы, для четырех ног получаются те же 12 степеней свободы.
Работы по созданию шагающего грузовика носили поисковый, экспериментальный характер. На базе таких работ часто появляются новые предложения и изобретения. Так, в частности, в технической печати обсуждается возможность создания машины, сочетающей принципы шагания и перекатывания. По хорошей дороге машина катится на колесах; при движении по бездорожью колесо играет роль стопы, а шагание осуществляется управляемым механизмом подвески колеса.
В принципах построения шагающих машин, как и в принципах построения полу роботов, обнаруживаются две тенденции. Одна проявляется в стремлении обеспечить оператору эффект присутствия - посадить его в машину, другая - создать телеуправляемую систему.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'