Кто ты, робот?
Ответить на этот вопрос не так-то просто. Заглянув в недра современного роботизированного предприятия, мы не обнаружим там столь привычных по фантастическим романам "железных киберов", бесстрастно склонившихся над станками. В то же время современное промышленное производство настолько насыщено разнообразными автоматами, что порой возникает ощущение, что весь завод - это один гигантский робот.
Что же такое современный промышленный робот? Чем отличается он от манипулирующего раскаленными заготовками блюминга или ловко закупоривающего бутылки автомата?
Главное достоинство промышленного робота перед другими автоматическими устройствами - его "гибкость", то есть простота переналадки для выполнения самых разнообразных операций. Что еще способна делать машина, предназначенная для закупоривания бутылок? Да ничего. Рожденный закупоривать летать не может! Тысячи специализированных автоматов должны быть выброшены или с большими затратами переоборудованы, когда меняется характер производственного процесса, но только не робот, в котором достаточно заменить программу и сменить оконечные устройства. Итак, если на этой неделе роботы производят окраску кузова автомобиля, на следующей они работают сварщиками, если утром упаковывают продукцию, вечером грузят ее на платформы, и делают они это лучше, чем люди. Их "руки" тверды и устойчивы, движения неутомимы и аккуратны. Вот только выглядят они не столь привлекательно, как полюбившиеся нам "киберы": длинные "шеи", высовывающиеся из массивных "туловищ", захваты, напоминающие клювы, моторы, клапаны, проволока, шланги. Они шипят, свистят и извиваются у нас на глазах; ни дать ни взять - вымершие чудовищные птицы, вдруг воскресшие в металле.
Современный промышленный робот - это удивительное средоточие, казалось бы, несоединимого. В англоязычных странах для характеристики робота используют непереводимый термин "kluge", означающий систему, состоящую из разнородных компонентов, конструкторы которых никогда не собирались использовать их совместно. Действительно, какой случай мог бы слить воедино в качественно новое образование насосную станцию и современную ЭВМ, многочленную механическую руку и телевизионную камеру? Развиваясь независимо, все эти составляющие робота достигли определенного совершенства, когда отнюдь не случай, а дерзкая мысль инженеров свела их вместе, чтобы еще лучше служить человеку. Однако для этого потребовалось преодолеть узкие междисциплинарные рамки, терминологические баррикады, психологические барьеры и массу других, обычных в новом деле преград. Отголоски этих баталий заметны и сегодня, особенно когда различные классы специалистов претендуют на роль "крестных отцов" робототехники. Невольно вспоминается старинная индийская притча о трех слепцах, ощупывающих слона и выносящих свои суждения.
Расскажем современную притчу о трех инженерах, впервые увидевших промышленного робота.
- Какой совершенный механизм! - воскликнул специалист по строительным машинам. - Вы обратили внимание на число степеней свободы и высокую точность манипулятора? Ошибка составляет не более долей миллиметра, и это при весе транспортируемой детали в несколько десятков килограммов! Особенно удивительна способность этого автомата перестраиваться с одной операции на другую, ведь он работает без помощи человека!
- Да разве только в этом дело! - перебил его специалист по ЭВМ. - Перед нами современный компьютер. Здесь мы имеем блестящий пример расширения функциональных возможностей ЭВМ за счет новых устройств ввода и вывода информации: тактильных датчиков, телекамеры, микрофона и на выходе гибкого манипулятора. Самое замечательное, что благодаря этим устройствам компьютер получил уникальную возможность проявлять физическую активность в окружающей среде. А то, что вас поразило больше всего - способность к переналадке, - так это же естественное свойство компьютера - программируемость. Мини-ЭВМ робота просто перешла к выполнению новой программы!
Уровень интеллекта
- Я не вижу здесь предмета для спора, - вмешался в разговор специалист-кибернетик. - Главное здесь не механическая конечность или электронный мозг. Главное состоит в том, что чем эффективнее человечество развивает техносферу, тем больше наших достижений мы обнаруживаем у живой природы, в биосфере. Помните, как сказал Герберт Уэллс: "Перед каждым паровозом бежит тень лошади". И мы имеем наглядное подтверждение этого тезиса. Перед нами искусственный аналог живого мыслящего существа, так сказать, антропоморфная модель человека. Вот искусственные руки наподобие рук рабочего, вот органы чувств: зрение, слух, осязание - и вот, наконец, прообраз головного мозга - ЭВМ, которая и сообщает этому искусственному существу способность к рефлекторно-целесообразной деятельности! Присмотритесь, ведь движения робота просто воспроизводят поведение рабочего.
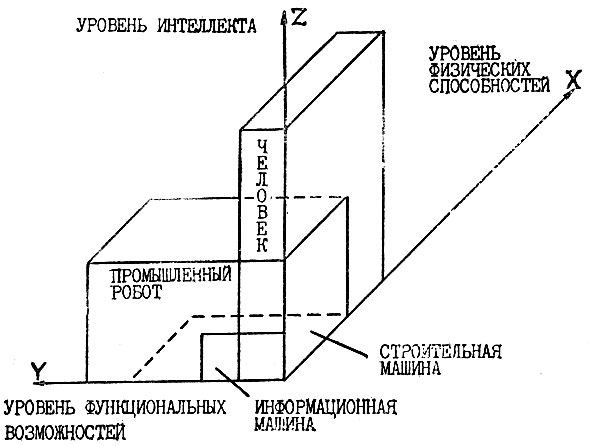
Так рассуждали специалисты, про которых еще Козьма Прутков заявил: "Узкий специалист подобен флюсу: полнота его односторонняя". Попытаемся разрешить их спор и ответить на вопрос: "Что же такое робот?" Возьмем аналогию робота с человеком. Какие качества в данном случае нас интересуют? Во-первых, функциональные возможности человека, а именно: приспособляемость, универсальность, способность к выполнению сложных движений. Во-вторых, физические данные, которые включают силу, скорость, надежность, стабильность основных характеристик. И наконец, в-третьих, умственные способности, которые охватывают восприятие, обучение, наличие памяти, логики и т. д. Если изобразить эти категории качества графически, то получится трехмерное пространство X, Y, Z, где каждая из категорий имеет свою ось.
Возьмем какую-нибудь строительную машину, например экскаватор. Он обладает функциональными способностями: известной универсальностью, возможностью манипулировать ковшом и перемещаться. Кроме того, он обладает физическими данными, которые обеспечиваются его двигателями. Если отложить категории, присущие экскаватору по осям X и Y, получим условное двухмерное "пространство экскаватора". Очевидно, что экскаватор начисто лишен интеллекта, его заменяет интеллект водителя, поэтому по оси Z мы ничего откладывать не будем. Рассмотрим теперь с тех же позиций, например, компьютер. Он обладает определенным интеллектом и некоторыми функциональными способностями, в частности универсальностью и приспособляемостью. Двухмерное пространство компьютера можно изобразить по осям Z и X.
Компьютер, по крайней мере в традиционном смысле, не обладает вовсе физическими данными, поэтому на оси X мы также ничего не отложили. Итак, все эти машины на нашем рисунке оказались двухмерными, так как расположены по своим качественным возможностям в плоскости лишь двух осей.
Теперь изобразим "пространство робота" и "пространство человека". И робот и человек обладают всеми перечисленными качественными категориями в совокупности, а именно: функциональными возможностями, физическими данными и умственными способностями. Поэтому на нашей схеме их пространства будут трехмерными.
Именно в этом совпадении качественных пространств и состоит антропоморфность робота, то есть сходство его с человеком. Наиболее распространенное техническое определение промышленного робота следующее: "обучаемый, программно-управляемый манипулятор". Некоторые организации, производящие роботов, стремясь отделить понятие "промышленный робот" от понятия "робот", используемого в научной фантастике, называют эти автоматы "транспортирующими устройствами", или "автоманипуляторами".
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'