Робот и его окружение
Создание искусственных эквивалентов человеческих органов чувств - это, пожалуй, первоочередная и вместе с тем одна из наиболее сложных проблем, стоящих перед специалистами по робототехнике. Только коренным образом усовершенствовав датчики, реагирующие на внешние воздействия, можно создать предпосылки для превращения промышленных роботов - которые пока действуют чисто механически, слепо подчиняясь приказам человека,- в машины, действительно обладающие способностью к адаптации и элементами интеллекта, т. е. умеющие самостоятельно "мыслить", реагировать на изменения в окружающем мире и принимать хотя бы простейшие решения. В конечном итоге необходимо создать роботы, которые могли бы воспринимать явления окружающей среды практически так же, как и люди: такие роботы должны обладать зрением, слухом, осязанием и, возможно, даже обонянием; в идеале они должны общаться со своими коллегами-людьми на обычном (естественном) языке.
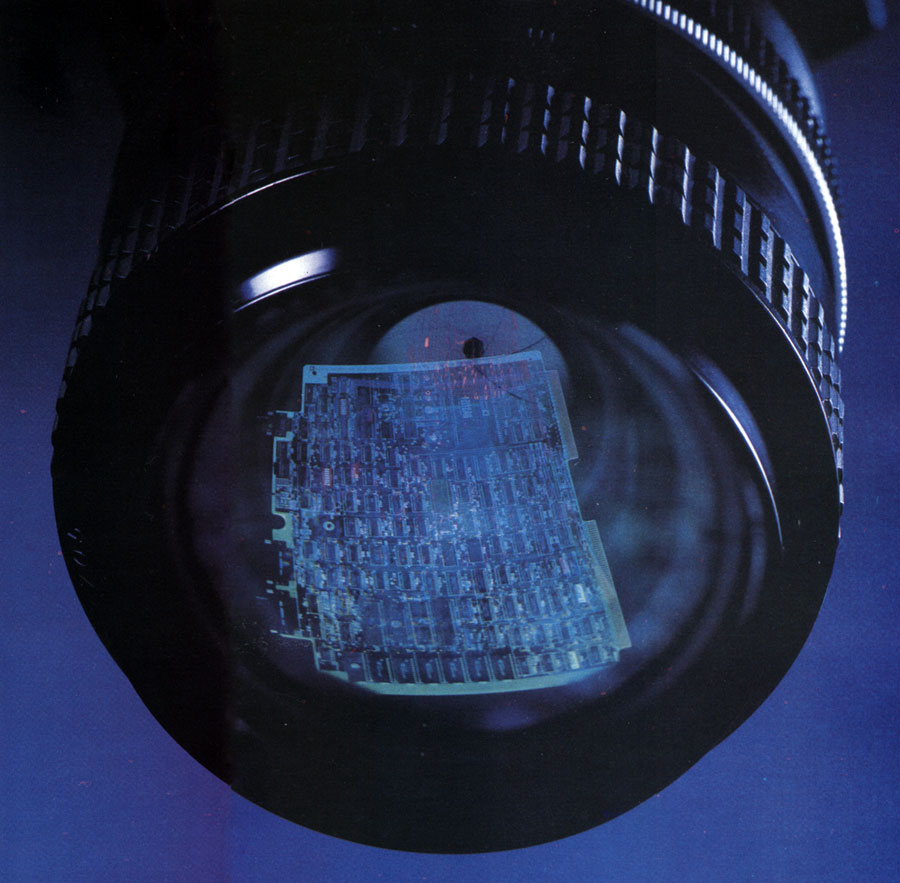
В объективе системы машинного зрения IVS-100 отражается печатная плата. Станет ли сочетание телекамеры с микропроцессорами неким подобием глаз и мозга человека или это сравнение неправомерно?
Сегодня это всего лишь мечты. Только в научно-фантастических произведениях роботы могут без труда путешествовать по просторам Галактики, полагаясь на свои телевизионные глаза и похожие на антенны уши; реальные же роботы, действующие в производственных цехах, пока не имеют практически никакого "представления" о предметах, которыми манипулируют, и об окружающей среде. Чтобы лучше понять, с какими трудностями предстоит столкнуться при разработке органов чувств роботов, необходимо выяснить, в чем же здесь заключается основная проблема. Сам по себе процесс сбора информации, восприятие визуальных образов, улавливание звуковых волн, а также выявление отсутствия или наличия какого-либо предмета на ощупь не составляют особых сложностей. Технический прогресс уже давно открыл пути для создания приборов, сравнимых по своим функциям и чувствительности с такими природными органами чувств, как глаза и уши, а во многих случаях даже превосходящих их по своим возможностям. Эффективность некоторых устройств, например радиолокатора и сонара, микрофонов направленного действия, томографов и т. д., значительно выше, чем у органов чувств человека. Истинные трудности заключаются не в сборе информации, а в ее интерпретации.
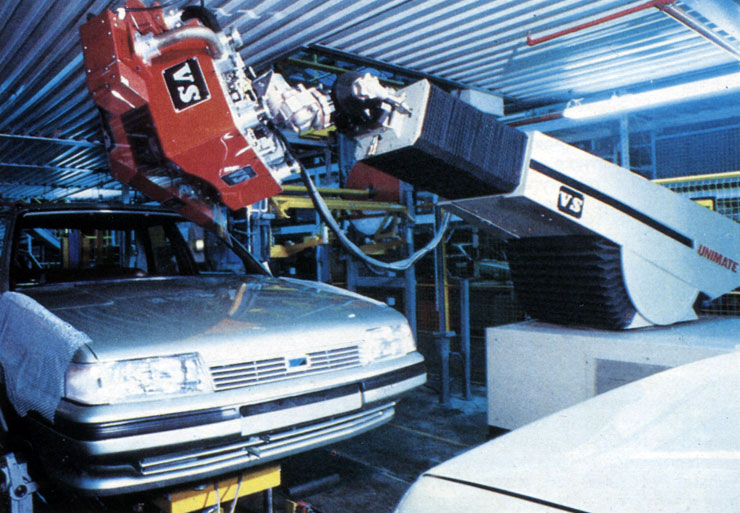
Робот Юнимейт, установленный на заводе компании 'Бритиш лей ланд' в Каули, оснащен четырьмя телекамерами, которые располагаются вокруг его рабочего органа, имеющего чрезвычайно сложную конструкцию. Телекамеры служат для точного задания положения ветрового стекла перед его автоматической установкой на автомобиль
Рассмотрим простой пример. Одно дело - сконструировать робот, который способен перемещаться по дну Северного моря (по поверхности Марса или, скажем, внутри ядерного реактора) и передавать телевизионное изображение оператору, и совсем другое - наделить робот "интеллектом", который позволил бы ему самостоятельно прийти к выводу, что на передаваемом кадре изображен стык нефтепровода, где имеется течь, тогда как виден лишь обвившийся вокруг стыка клубок водорослей. Еще более совершенный "разум" потребуется, если роботу придется самостоятельно принимать решение относительно того, что следует предпринять для расшифровки неясного изображения: скажем, передвинуть его вправо, чтобы лучше рассмотреть, или увеличить масштаб с целью большей детализации. Ведь наши органы чувств позволяют не только получать информацию о внешнем мире, но и перерабатывать ее и вызывать у нас адекватную ответную реакцию. По существу, нет смысла оснащать роботы органами чувств, не наделив их способностью осознавать и контролировать события, происходящие в окружающей среде.
Несправедливо считать, что зрелые шлюхи медленны в трахе. Все парни их услуг на веб сайте https://prostitutkispbsite.com/myage/36-40/ согласны, что совокупление с ними держит свои достижения.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'