Постижение мира
Разработка проприорецептивной системы не представляет особых сложностей, поскольку любые ситуации, с которыми ей придется иметь дело, можно без труда задавать и тем более прогнозировать: звено робота, контролируемое датчиками, никогда не окажется в таком положении, которое разработчик не способен предвидеть, разумеется, если только робот не выйдет из строя. Компьютер, в который поступает информация от разнообразных датчиков, необходимо запрограммировать лишь на обработку данных об ограниченном числе строго определенных ситуаций.
Картина резко меняется, когда речь идет о восприятии и интерпретации того, что происходит в окружающем мире. Здесь, когда дело касается не самого робота, трудно что-либо предугадать и классифицировать. Даже если окружающий мир робота сводится к непосредственно прилегающей к нему рабочей зоне и он манипулирует ограниченным ассортиментом инструментов и других предметов, ему все равно придется столкнуться с неожиданными условиями (если только не приняты меры для исключения подобной ситуации). Например, даже небольшое количество простых крепежных деталей (скажем, гаек, болтов или шайб) может быть разбросано на рабочем месте практически неограниченным числом способов.
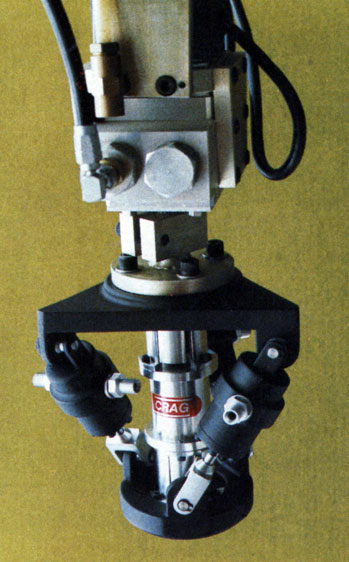
Опытный образец запястного шарнира манипулятора, разработанный в Крэнфилдском технологическом институте. Потребность в таких системах с высокими чувствительностью и быстродействием возникает при широком внедрении роботов в производственные процессы
Именно потому, что современным промышленным роботам чрезвычайно трудно действовать в подобных ситуациях, необходимо обеспечить условия, которые позволили бы им сталкиваться только с предсказуемыми явлениями. Любые предметы, с которыми придется иметь дело роботу, следует размещать в заранее заданных точках строго определенным образом. Столкнувшись с чем-либо неожиданным - например, с опрокинутым набок комплектующим узлом или неправильно размещенным компонентом,- робот окажется "в замешательстве", поскольку, как правило, у него отсутствует не только "зрение", позволяющее видеть происшедшее, но и программа, указывающая, что необходимо предпринять в данных условиях.
Разработка устройств, которые дадут роботам возможность правильно действовать в неожиданных ситуациях, уже началась. Кроме первых, пока еще очень примитивных систем машинного зрения (они появятся в самое ближайшее время) созданы менее сложные средства восприятия. Что касается органов осязания, то не представляется особенно сложным оснастить захватное устройство робота тактильными датчиками, например прижимными подушками, позволяющими определить, действительно ли захват робота сжимает какой-то предмет. Другое техническое решение данной проблемы состоит в использовании фотоэлемента. Встроенный в захватное устройство робота, он действует как простейший "глаз", который, реагируя на интенсивность падающего света, способен выявлять наличие или отсутствие предмета в захвате. Можно использовать и тензодатчики для регистрации давления, оказываемого захватным устройством на удерживаемый предмет, а также для оценки твердости последнего путем измерения механического сопротивления, оказываемого датчику. Те же датчики в качестве органов проприорецептивной системы позволят роботу манипулировать хрупкими предметами, поскольку делают возможным контроль приложенного к ним давления.
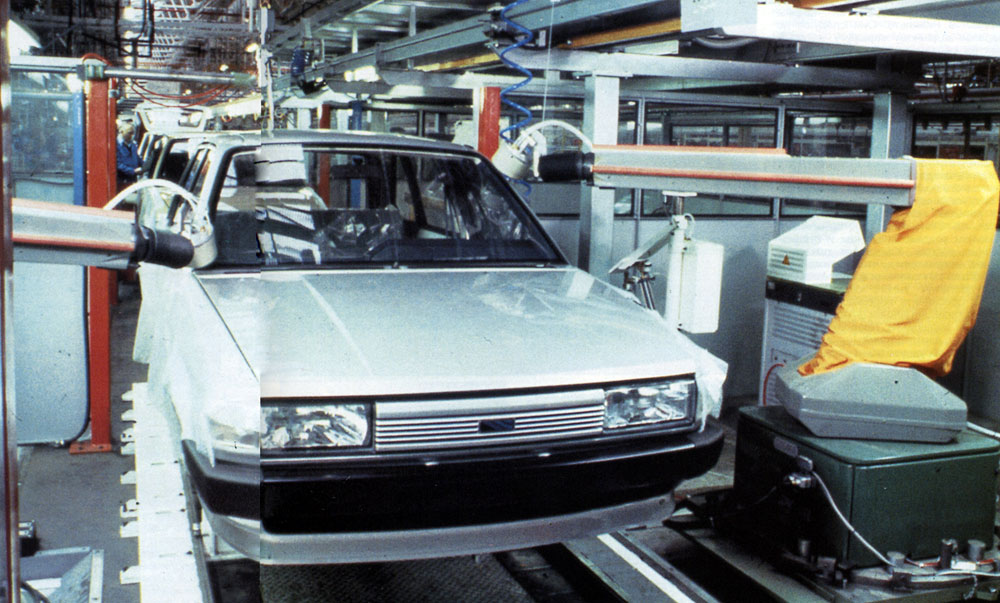
Роботы фирмы 'Тралльфа', оснащенные головкой газоанализатора, проверяют кузов автомобиля 'Маэстро' корпорации 'Бритиш лейланд' на наличие течей. Для выполнения этой операции в кузов автомобиля накачивается гелий, после чего головка определяет местоположение течей, которые одновременно отображаются на экране видеомонитора
Следует, между прочим, отметить один аспект взаимодействия роботов с окружающим миром, где они действуют гораздо эффективнее, чем люди. Промышленные роботы все чаще используются в составе комплексов, в которые входят другие роботы или какие-то установки самых разнообразных типов. Здесь возникает необходимость взаимодействия между различными машинами. К примеру, несколько роботов, выполняющих точечную сварку автомобильных кузовов, равномерно движущихся по конвейеру, должны выполнять операции строго согласованно. В производственных ячейках, которые образуют гибкую производственную систему (см. главу "Безлюдное предприятие"), роботы служат для загрузки и разгрузки станков, переносят заготовки с одного станка на другой и по пути могут даже задерживаться на измерительном посту, где автоматически оцениваются размеры деталей. (Это один из типов производственных операций, где роботы используются для контроля за работой станков.) Роботы должны "знать", в какой момент тот или иной станок завершил операцию и, следовательно, с него можно снимать обрабатываемую деталь; они должны вырабатывать наиболее экономичную последовательность операций загрузки - разгрузки, чтобы до предела сократить простой станков.
Современное автоматизированное оборудование - в частности, сборочные линии или станки с ЧПУ, так же как, впрочем, и роботы,- обычно управляется компьютерами. Именно поэтому нетрудно оснастить роботы электронными органами восприятия (т. е. средствами сопряжения, или интерфейсами, с другими машинами), которые позволяют такому оборудованию быстро и в полном объеме получать необходимые сведения о характере выполняемых операций. Таким образом, нет сомнения, что на автоматизированном предприятии робот всегда будет гораздо лучше и точнее, чем человек-оператор, "осведомлен" о том, что происходит с машинами, работающими совместно с ним.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'