Движущиеся микророботы
Широко распространено представление о роботе как о "разумном" существе человекоподобного вида, которое при выполнении задач различной сложности перемещается на колесах или даже шагает; его неотъемлемые качества - подвижность и разум. Способность к передвижению позволяет работнику, будь то робот или человек, перемещаться относительно обрабатываемой детали, а не наоборот, как в случае стационарных роботов-манипуляторов. Однако перемещение робота порождает свои проблемы. Задача роботов - взаимодействие с окружающей средой (что собственно составляет суть любой деятельности). Но каким образом он может справиться с этой задачей, если, перемещаясь, не знает точно, где он находится и тем более где и как расположены окружающие его предметы? Чтобы разобраться в этом, требуется интеллект, т. е. способность воспринимать и реагировать на препятствия, обрабатываемые детали, людей и другие предметы внешнего мира. Способность решать возникающие при этом проблемы необходима для хорошего робота, выполняет ли он роль слуги или рабочего.
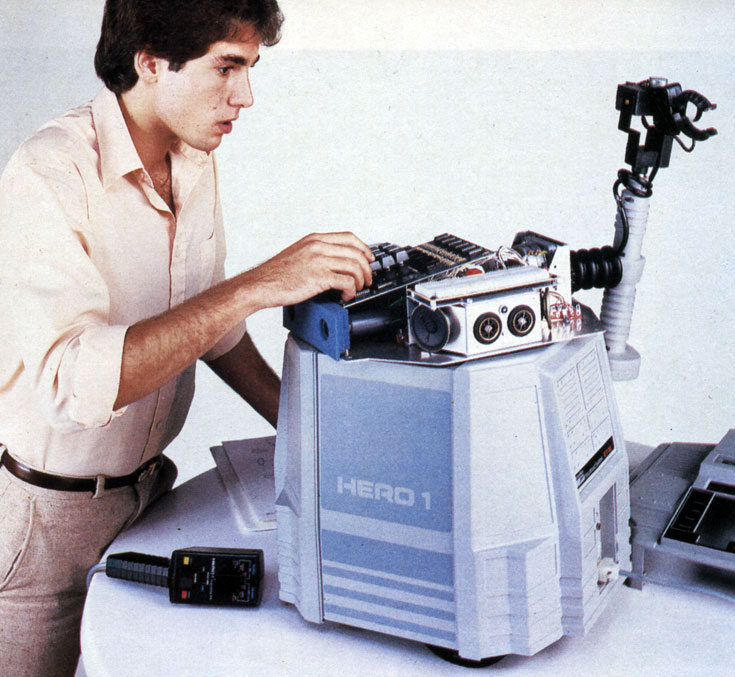
На фотографии изображена поворачивающаяся 'голова' робота 'Хиэроу', на которой закреплены 'рука', клавиатура для ввода информации в шестнадцатеричном коде и датчики; внизу справа частично виден интерфейс кассетного магнитофона. На столе лежит выносной обучающий пульт (слева)
Насколько совершенны движущиеся роботы "современного поколения"? Прежде всего ни один из них не может шагать. Создание робота, способного шагать подобно человеку, представляет собой чрезвычайно трудную механическую задачу; реализовать необходимую для этого последовательность действий - отрыв одной ноги от пола, перемещение ее вперед, затем перенос тяжести на эту ногу и поднятие другой ноги - гораздо сложнее, чем научить робот передвигаться на колесах или гусеницах. Однако при перемещении на колесах большие трудности возникают в тех случаях, когда робот должен передвигаться по лестнице или пересекать неровную местность. Все имеющиеся ныне роботы перемещаются на колесах или гусеницах, но в основном - на колесах.
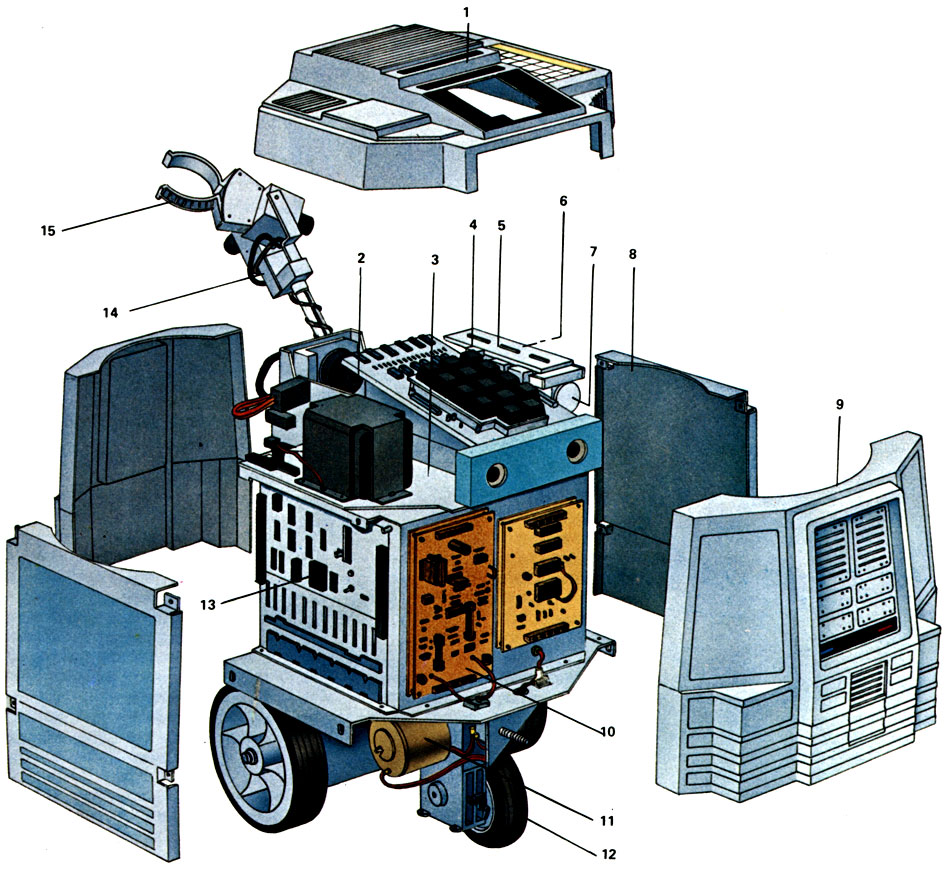
Робот 'Хиэроу-1' фирмы 'Хиткит': 1 - семисегментный индикатор на светодиодах; 2 - аккумуляторы; 3 - 'голова', поворачивающаяся на 350°; 4 - клавиатура для ввода шестнадцатеричных данных; 5 - закрепленная сверху макетная плата для сопряжения со схемами, разработанными пользователем; 6 - блок, в котором находятся синтезатор речи, ультразвуковой детектор движущихся предметов и оптический детектор; 7 - звукоулавливатель; 8 - система ультразвуковой локации; 9 - съемные боковые панели; 10 - сменные электронные блоки в виде печатных плат; 11 - редукторный электродвигатель постоянного тока; 12 - переднее колесо (ведущее и направляющее); 14 - манипулятор с четырьмя степенями свободы; 15 - схват (смыкается и размыкается). Персональный робот 'Хиэроу-1' и прилагаемое к нему методическое пособие быстро стали своего рода стандартом для создателей бортовых микророботов. По мнению фирмы 'Хиткит', этот робот демонстрирует основные концепции робототехники, которые необходимо знать учащимся, и потому может служить идеальным учебным пособием. 'Хиэроу' - движущийся программируемый робот, оснащенный манипулятором, охватом, устройством речевого вывода информации и датчиками и имеющий пять степеней свободы: наклон и вращение запястья, наклон руки, вылет руки, смыкание и размыкание схвата. Максимальная полезная нагрузка (при убранной руке) составляет 0,45 кг. Синтезатор речи представляет собой систему, основанную на использовании фонем, которая формирует 64 звуковых тона для имитации человеческой речи и звуковых эффектов. Датчики реагируют на звук, свет и движущиеся предметы, что позволяет использовать робот, например, в качестве домашнего ночного сторожа. Кроме того, робот оснащен ультразвуковой системой измерения расстояния. На голове робота находятся датчики, а также поле монтажных выводов для подсоединения макетной платы, Обеспечивающей пользователю прямой доступ к каналу ввода-вывода данных. Положением единственного ведущего колеса управляет шаговый двигатель, а приводным двигателем - оптическое кодирующее устройство, которое измеряет пройденное расстояние. Робот управляется микропроцессором 6808 и может быть запрограммирован с встроенной клавиатуры, выносного обучающего пульта или внешнего кассетного магнитофона
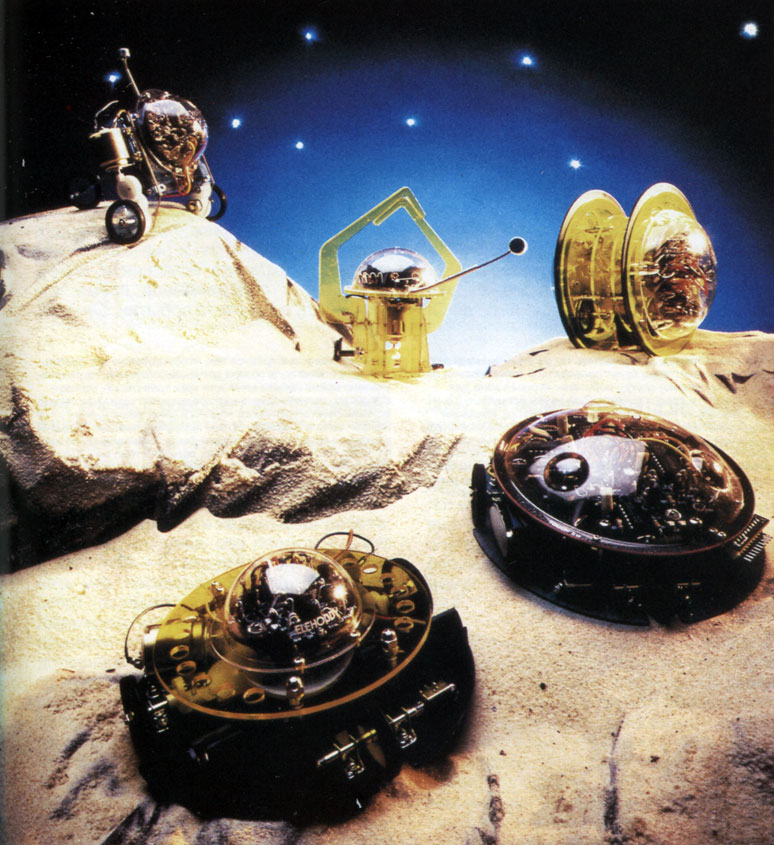
Привлекательность микророботов для детей заинтересовала изготовителей игрушек во многих странах. На фотографии показаны японские движущиеся роботы серии 'Мувит', которые каждый желающий может собрать самостоятельно
В разработках подвижных роботов приоритет принадлежит США; существуют движущиеся роботы двух видов: "черепаха" и свободно перемещающийся робот. Робот-черепаха соединен кабелем с управляющим компьютером; роботы подобного типа описываются в разделе "Роботы в системе образования" настоящей главы. В основном они используются для целей обучения. Прародителем робота будущего, который может стать помощником человека в быту, является свободно перемещающийся робот, оснащенный "бортовым" компьютером, источниками питания, датчиками различных типов и "разумной" программой, управляющей всеми узлами робота. На протяжении ряда лет энтузиасты-любители, самостоятельно занимающиеся созданием роботов, были особенно активны в США. По данным Американской ассоциации робототехники, в США более двухсот любителей построили собственные роботы. В их число входит робот Шейки - один из первых движущихся роботов, сконструированный в Станфордском научно-исследовательском институте (см. гл. "Движущиеся роботы"), а также многие другие устройства, созданные в лабораториях и мастерских по всей стране. В Великобритании здесь лидирует компания "Бритиш петролеум", которая организовала крупнейшее своего рода соревнование по созданию роботов. Учащиеся более 100 школ с увлечением конструируют роботы, которые будут подавать определенное число порций напитков людям, сидящим за столиками (а не стоит ли этим людям на всякий случай облачиться во влагонепроницаемую одежду?) в местах, где проводятся такие соревнования.

Робот К-9 из фильма 'Доктор Ху' иллюстрирует наметившуюся на телевидении и в кинематографе тенденцию изображать роботы как помощников и друзей человека, а не его врагов
Эти устройства, однако, не предназначены служить в качестве персональных роботов - последние выпускаются коммерческими фирмами. Около полудюжины фирм предлагают самые разнообразные устройства, однако самое заметное место среди таких изделий занял робот "Хиэроу-1" (герой). Этот робот, выпускаемый корпорацией "Хит-кит", специализирующейся на конструкторских наборах для сборки электронных устройств, поступает в продажу и как комплект деталей, и в собранном виде; прилагающееся к нему руководство являет собой образец справочной литературы по робототехнике. Возможно, именно это руководство, ориентированное главным образом на рынок обучающих средств, и есть главная причина коммерческого успеха робота. Основное содержание уроков, представленных в удобной для учителя форме, составляют пояснения и инструкции. Корпорация "Хиткит" продала несколько тысяч роботов "Хи-эроу" - в основном в США; на долю этого робота пришлось около 80% всего объема продаж микророботов. Однако спрос не оправдал ожиданий изготовителей робота, и, по мнению Майка Босу-эрта, ответственного за выпуск робота, не приходится рассчитывать на его повышение в ближайшие годы. Причина, как думается, заключается в том, что в ответ на вопрос покупателя: "А что робот умеет делать?" - изготовители не могут сказать ничего интересного, ибо возможности робота весьма ограниченны. И вряд ли имеет смысл приобретать такую "домработницу" за 1,6 тыс. ф. ст.
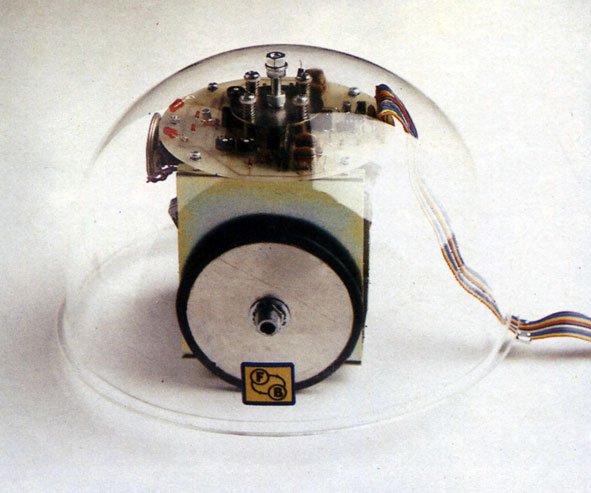
Черепаха Армадилло (броненосец) фирмы 'Фидбэк', приводимая в движение двумя независимыми ведущими колесами, управляется компьютером. По команде она может опустить перо и вычертить маршрут своего движения на бумаге
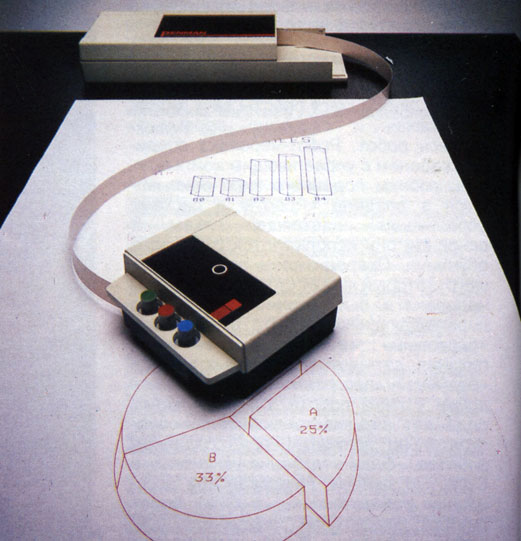
Трехцветный графопостроитель 'Пенмен' может также действовать как настольная 'черепаха'. Он оснащен оптическим и тактильным датчиками, позволяющими ему определять свое местоположение и обходить препятствия
В самом деле, что же он умеет делать? Некоторые из его функций представляют собой заранее запрограммированные встроенные "модули", которые вызываются с помощью клавиатуры, расположенной на "голове" робота. Робот высотой 48 см и весом 9,5 кг перемещается по дому на колесах и может переносить в кисти, закрепленной на выдвигающейся руке, груз 0,45 кг. В его корпусе установлены датчики, имитирующие органы восприятия человека. Робот способен воспринимать звуки и распознавать ограниченный набор команд, в том числе "старт", "стоп", "влево", "вправо" и т. д. Он реагирует на свет, а для измерения расстояния и обнаружения препятствий использует ультразвуковые датчики. Благодаря встроенным часам робот может выполнять конкретные программы за строго определенное время. Кроме того, в нем имеется синтезатор речи, который генерирует 64 звуковых тона для имитации человеческой речи и подачи звуковых сигналов. Робот поет, играет в различные игры; ему можно приказать охранять помещение, разбудить вас в определенное время или напомнить о каком-то событии. Он снабжен рукой, с помощью которой может поднимать предметы и класть их себе на голову, т. е. служить своего рода посыльным. Рука вытягивается на 127 мм, имеет 4 степени свободы и оснащена простым схватом. Чтобы оценить возможности и недостатки робота, недостаточно лишь раз посмотреть его в действии - следует поэксплуатировать его несколько недель. В общем робот создает впечатление сложной говорящей игрушки, которая способна принести вам курительную трубку или домашние туфли, если они находятся в том же помещении. Робот можно использовать как забавное развлечение на вечеринке, однако в роли помощника по дому он едва ли сравнится даже со стиральной машиной.
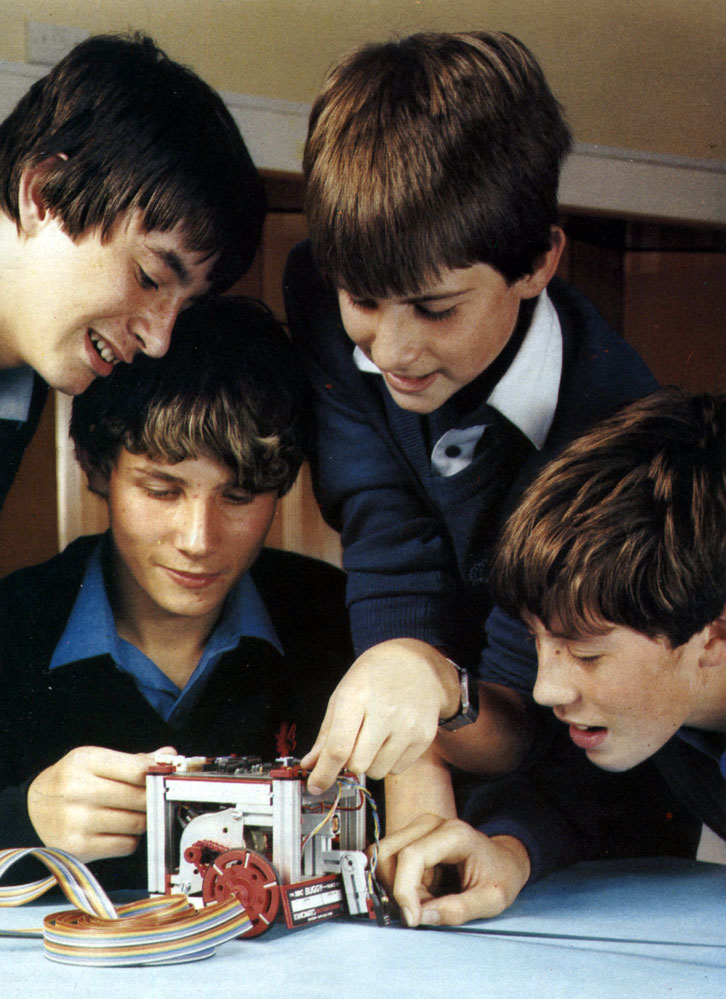
Робот Багги фирмы ВВС спроектирован как учебное пособие, которое помогает детям знакомиться с методами применения компьютеров в промышленности для целей управления

Согласно правилам состязания 'Евро-мышь', управляемый микропроцессором робот-мышь должен за 15 мин найти путь к центру лабиринта. На фотографии - робот Тезей во время проведения соревнований в Копенгагене в 1984 г.
Тем не менее разработка подобного робота представляет собой еще один, хоть и небольшой, шаг в направлении создания механического помощника по дому. Он может подавать сигналы тревоги при попытке проникновения в дом постороннего, а также в случае возникновения пожара; кроме того, его можно использовать в качестве прислуги и посыльного. Хотя подобному роботу еще далеко до безупречного человека-слуги, он и в своем нынешнем виде способен доставить вам немало веселых минут.
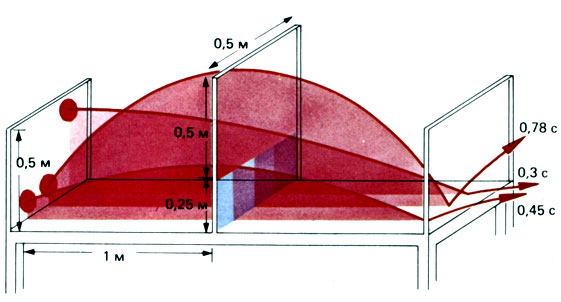
Настольный теннис для роботов. На рисунке указаны размеры стола, на котором будут проводиться соревнования по настольному теннису между роботами. Игровая зона для каждого робота представляет собой рамку площадью 0,5 м2, закрепленную на краю стола. Диаметр ракетки, имеющей форму круга, не должен превышать 12,5 см. Как и в обычном настольном теннисе, робот должен ударить по мячу так, чтобы он отскочил один раз от поверхности стола на стороне соперника, перед тем как попасть в зону игры робота-соперника. Мяч бросается подающему простым устройством, расположенным над центральной рамкой стола. Площадь центральной рамки выбирается так, чтобы робот не мог бросить мяч за пределы поля обзора датчиков соперника. На рисунке указано время полета мяча для трех траекторий, соответствующих случаям самого низкого резаного удара над сеткой, максимально допустимого подброса мяча вверх (свечи) и 'гашения' мяча в зону игры. Чтобы исключить возможность бесконечного разыгрывания подачи, было установлено, что один из соперников выигрывает очко, если он отбил мяч 20 раз. Предполагается, что подобное состязание станет не только забавным зрелищем, но и будет содействовать разработке недорогих датчиков, следящих за полетом мяча
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'