С точки зрения пилота
Пилотский пульт имитатора МОА выполнен в соответствии с новыми конструктивными принципами, разработанными корпорацией "Эссекс", что облегчает "пилотирование". На таком пульте имеются два ручных органа управления, между которыми расположена клавиатура. На лицевой стороне смонтированы два телевизионных экрана: слева - информационный, справа - для воспроизведения изображений, получаемых камерой МОА; кроме того, в передней части комнаты расположен крупноформатный проекционный видеомонитор. Оригинальная особенность конструкции - пологая форма пульта, что позволяет оператору сидеть в менее напряженной позе при управлении МОА. В ближайшее время предполагается провести испытания системы стереоскопического зрения: оператор будет надевать специальный шлемофон с надглазниками, которые, выделяя или затемняя определенные участки изображения, наблюдаемые левым или правым глазом, обеспечивают объемное восприятие объектов. Специалисты намерены опробовать еще один метод, который, возможно, упростит процедуры управления КА. Он состоит в том, что компьютер формирует мультипликации, позволяющие как бы взглянуть на МОА и целевой объект с некоторого расстояния; это даст пилоту возможность правильнее судить об их взаимном положении. Разрабатывается также имитатор движения цели с шестью степенями свободы; в нем предусмотрены макеты КА, перемещения которых будут соответствовать предполагаемым движениям реальных космических аппаратов.

Брюс Маккендлесс проводит эксперименты во время полета 'Шаттла' 41В, закрепившись на манипуляторе ДУМС с помощью 'стремени'
Конечную цель специалисты лаборатории видят в реализации процесса, в котором вначале имитируется сближение аппарата на плоской платформе с другим КА, затем управление передается Комплексной орбитальной обслуживающей системе (КООС), с которой ведется обмен видеоинформацией, далее производится замена необходимых модулей обслуживаемого КА, после чего управление снова переходит к КА на плоской платформе, и, наконец, аппараты отводятся друг от друга. Оператор здесь не должен ощущать разницы с реальным процессом, за исключением некоторых малосущественных отличий между различными макетами КА. С точки зрения оператора, все происходит как "на самом деле": стыковка с целевым объектом, его ремонт и последующая расстыковка.
Комплексная орбитальная обслуживающая система по своему составу в целом соответствует комплекту для обслуживания спутников на орбите, который предполагается монтировать на лицевой стороне МОА. Систему КООС применяла фирма "Мартин Мариетта" в ходе упомянутого выше исследования, направленного на разработку концепции спутника с дистанционным управлением для обслуживания объектов на орбите (ДУСОО). КООС представляет собой крестообразную конструкцию с размещенными на ней монтажными стойками для блоков электронной аппаратуры. В центре несущей конструкции закреплен манипулятор, который может извлекать нужные электронные блоки и устанавливать их в расположенный выше макет спутника. Телекамера смонтирована на рабочем органе манипулятора, представляющем собой простейшее захватное приспособление с мощной отверткой, которой отсоединяются блоки.
Спутник для измерения радиационного фона Земли развернут с помощью системы ДУМС в рамках программы вывода спутников во время полета 'Шаттла' 41G в октябре 1984 г.
Одна из проблем эксплуатации подобных систем в космосе связана с гравитацией, поскольку манипулятор, запрограммированный на Земле, в условиях невесомости окажется несколько выше цели. Отсутствие силы тяготения в космосе необходимо как-то компенсировать. "Поскольку мы должны точно задавать положение манипулятора, находясь под действием гравитации, влияние ее обязательно следует учитывать; именно поэтому человеку необходимо быть на орбитальном модуле, с тем чтобы скорректировать действия манипулятора, а затем снова передать управление роботу",- поясняет Том Брайан, один из инженеров-робототехников Центра им. Маршалла.
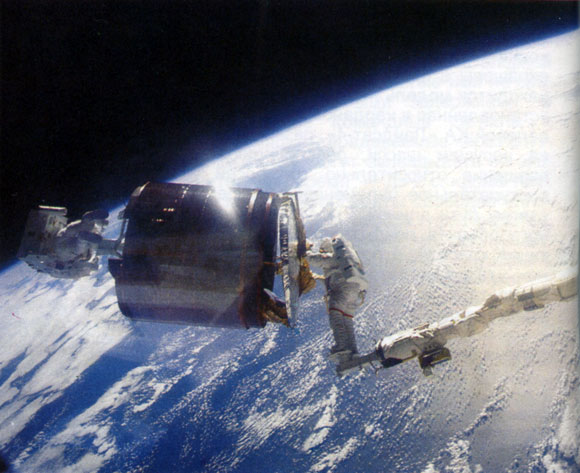
Джозеф Аллен, пристегнутый к манипулятору ДУМС, держит спутник 'Уэстар VI' (полет 'Шаттла' 51А в ноябре 1984 г.). Целью этой операции является возврат спутника на Землю
При эксплуатации космических роботов возникает еще одна проблема, связанная с тем, что в отличие от своих промышленных "собратьев" они должны выполнять не многократно повторяющиеся однотипные операции, а множество процедур, каждая из которых объединяет целый класс задач. Кроме того, на промышленном предприятии роботы систематически подвергаются техническому осмотру, и в космосе эта процедура также необходима.
Манипулятор ДУМС на борту "Шаттла" способен захватывать и выводить на орбиту спутники. Однако это единственное, что он умеет делать. Принципы построения роботов, которые могут выполнять более широкий круг задач, например открывать двери, отсоединять миниатюрные проводники и т. д., исследуются в настоящее время в ходе испытаний манипулятора для экспериментальных полетов (МЭП), разработанного фирмой "Мартин Мариетта" по заказу Центра им. Маршалла. Этот манипулятор с семью степенями свободы снабжен рабочим органом, напоминающим челюсти с входящими друг между другом зубами; он способен поднимать объект массой до 4,5 кг примерно так же, как человеческая рука.
Груз для летных испытаний удерживается манипулятором ДУМС над грузовым отсеком 'Чэлленджера'; эта операция проводилась во время полета 'Шаттла' STS-8 в сентябре 1983 г.
Чтобы создать для МЭП рабочую зону, аналогичную той, в которой ему, возможно, придется действовать на орбите, были построены два экспериментальных стенда. Сюда входят герметичный жидкостный соединитель (микропровод для передачи жидкости, например хладагента) фирмы "Фэрчайлд", панель с макетными модулями, прикрытыми дверцами, которые должен открывать и закрывать манипулятор, а также со стандартными электрическими разъемами, клапанами, крепежными элементами и т. д. Работа с такими компонентами не представляет сложности для человека, однако оказалось, что копировать искусные движения человеческой руки, получающей к тому же сигналы обратной связи от своих рабочих органов (пальцев), для манипулятора гораздо труднее, чем монтировать какой-либо кронштейн.
"Одно из действительно оригинальных средств, которые мы применили в МЭП,- это управляющая рукоятка с шестью степенями свободы",- отмечает Фред Роу. Она имеет форму шара с ребром наверху и весьма удобна в обращении, поскольку рука оператора легко охватывает ее. Предусмотрена также седьмая степень свободы - дополнительный поворотный шарнир рядом с плечевым суставом, служащий для поворота манипулятора в шаговом режиме и требующий непосредственного управления (его движения не контролируются компьютером). Такой орган управления можно поворачивать или перемещать поступательно в любом направлении, и в ответ на это рабочий орган МЭП будет двигаться, как вам необходимо.
Кит Кларк демонстрирует созданную им оригинальную конструкцию рабочего органа, который, надуваясь воздухом, плотно охватывает конструкцию из трубчатых ферм
По словам Роу, в процессе испытаний этого манипулятора специалисты НАСА хотят добиться того, чтобы подобные технические средства могли выполнять те же операции, что и человеческая рука, а оператор получал бы визуальные и звуковые сообщения о том, какие виды усилий он прикладывает к рабочему органу. "Желательно, чтобы свои действия оператор рассматривал как движения самого манипулятора, а не сосредоточивал внимание на ручном органе управления... Люди, работающие в атомной промышленности, считают механические манипуляторы продолжением собственных рук. Именно это крайне необходимо в космосе",- говорит Роу.
В лаборатории Центра им. Маршалла планируются также исследования с целью выбора оптимальной конструкции рабочего органа. "Мы не можем позволить себе роскошь отправлять в космос два десятка разных рабочих органов,- сказал Брайан. - Но вместе с тем космический аппарат должен быть оснащен всем необходимым, и поэтому рабочие органы используемых там манипуляторов должны быть гораздо более универсальными".
Специалистам предстоит еще исследовать немало магистральных направлений, связанных с разработкой космических роботов и дистанционно управляемых аппаратов. Ученые из Массачусетского технологического института в ходе двухлетнего исследования, получившего название АРАМИС (Space Applications of Automation, Robotics and Machine Intelligence Systems,- космические применения средств автоматизации, робототехники и систем машинного интеллекта), пришли к заключению, что на основе имеющихся технических средств можно разработать дистанционно пилотируемый обслуживающий модуль, способный непосредственно на орбите выполнять все операции технического обслуживания важнейших астрономических спутников (запуск которых планируется в настоящее время), а также развертывать КА, снимать их с орбиты и повторно запускать.
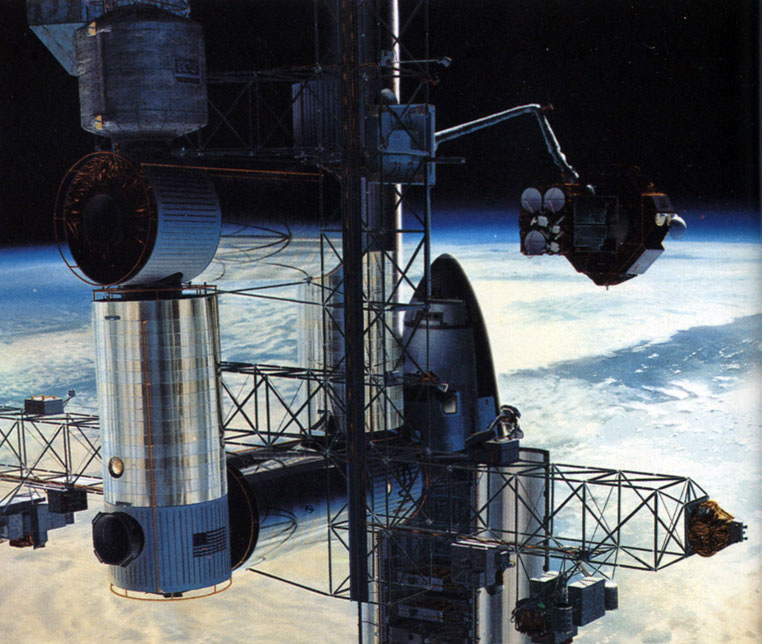
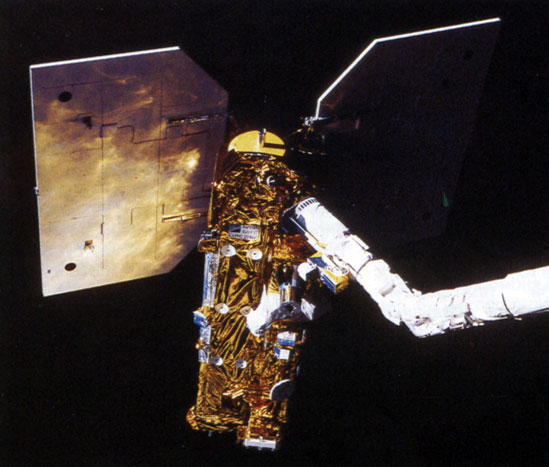
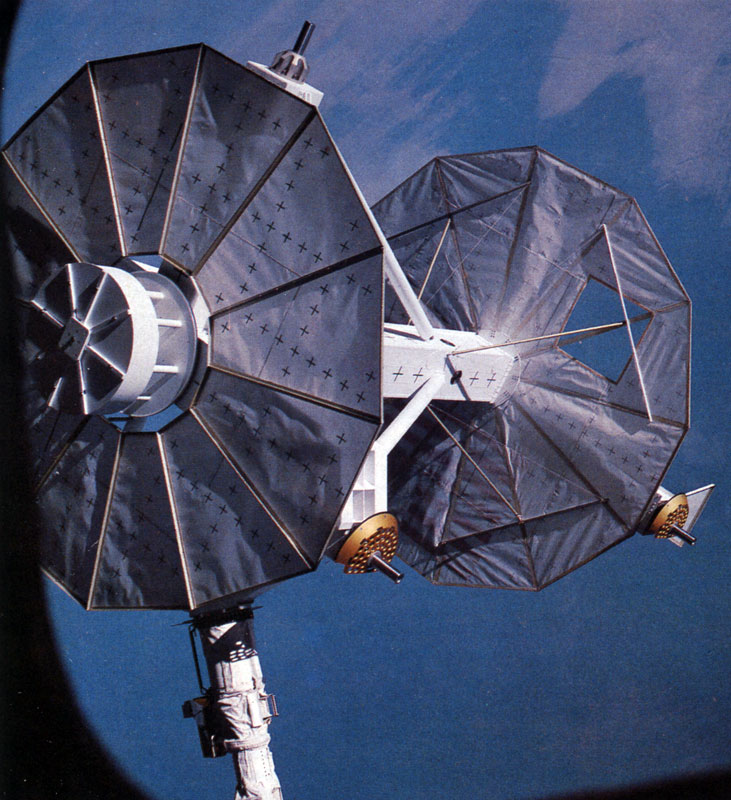
В разработанной американской фирмой 'Боинг' модели будущей пилотируемой космической станции предусматривается использование МОА (маневрирующего орбитального аппарата; на фотографии удерживается манипулятором ДУМС), предназначенного для сближения со спутниками и снятия их с орбиты
Первоначальный вариант такого обслуживающего модуля (он рассматривается ниже), возможно, появится к тому моменту, когда вступит в строй проектируемая НАСА космическая станция, если, конечно, его разработка начнется в ближайшее время. "Возможность успешного выполнения хотя бы одной заранее не запланированной операции в процессе развертывания космической станции могла бы с лихвой оправдать затраты на осуществление всей программы разработки устройств дистанционного присутствия", отмечается в программе АРАМИС.
Специалисты, работающие над программой АРАМИС, вкладывают в понятие "дистанционное присутствие" следующий смысл: манипулятор, находящийся на месте выполнения работ, обладает той же гибкостью и универсальностью, как и руки человека, а операторы в центре управления получают достаточную информацию по обратной связи, позволяющую им понять, что же в действительности происходит на космическом рабочем месте. "Цель дистанционного присутствия - выполнение с космическими объектами таких операций, которые требуют интеллекта и мастерства человека, а также контроля с его стороны в тех случаях, когда операции в открытом космосе невозможны или нежелательны либо когда невозможно достичь поставленных целей одними лишь этими операциями".
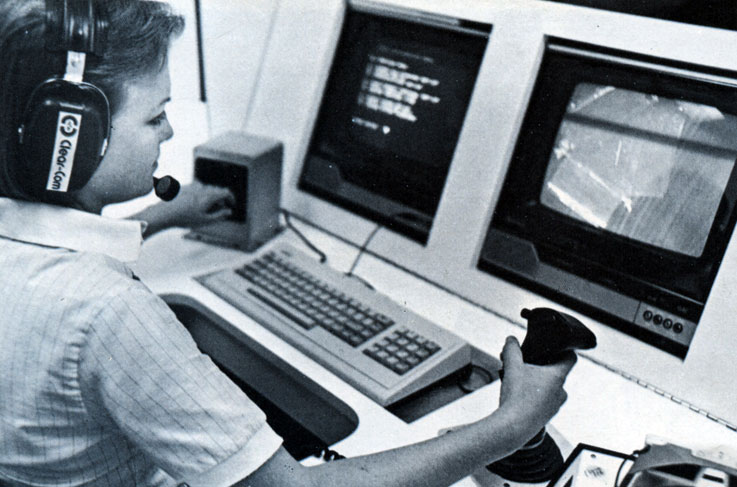
Пульт управления МОА, расположенный на имитаторе в Центре космических полетов им. Маршалла. Проводя стыковку МОА с целевым космическим аппаратом, оператор работает в режиме 'дистанционного присутствия'
Первые сеансы обслуживания, по-видимому, будут включать примерно такие же операции замены модулей, какие выполняли Нельсон и ван Хофтен с системой ориентации спутника "Солар макс"; аналогичные операции демонстрировались в ходе испытаний имитатора обслуживающего модуля в Центре им. Маршалла. При разработке программ обслуживания спутников пока еще не решена проблема приоритета задач, и специалистам НАСА придется взяться за нее, как они, например, поступили при подготовке операций со спутником "Солар макс".
"По существу, проблема заключается в том, что практически любую операцию по обслуживанию можно выполнить и низкоэффективными или устаревающими техническими средствами, если КА рассчитан на обслуживание именно такими средствами,- указывается в отчете по программе АРАМИС. - Поэтому в настоящее время программы обслуживания сводятся либо к примитивной замене модулей, либо к операциям в открытом космосе... Вообще говоря, чем большим совершенством отличается обслуживающий аппарат, тем в меньшей степени конструкция целевого космического объекта зависит от характера обслуживания".
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'