Техническое моделирование систем слуха
Начинать конструирование моделей слуховых систем лучше всего с простейшего акустического реле (рис. 61).
Микрофон (М) выполняет роль датчика. Он преобразует звуковой сигнал в электрические колебания, а усилитель низкой частоты (УНЧ) усиливает их. После детектирования (диод Д) сигналы вызывают срабатывание электромагнитного реле.
Принципиальная схема такого варианта акустического реле изображена на рис. 62. Каскады на транзисторах Т1 и Т2 образуют простой УНЧ, а диоды Д1 и Д2 - детектор. Эти устройства знакомы вам по транзисторным приемникам прямого усиления. Здесь диоды выпрямляют колебания НЧ. Транзистор Т3, резистор R6 и электромагнитное реле Р1 с диодом Д3, шунтирующим обмотку реле, образуют электронное реле, а лампочка Л1 с резистором R7 - исполнительную цепь.
Автомат работает так. Пока в помещении, где установлен микрофон, сравнительно тихо, в коллекторной цепи транзистора ТЗ течет небольшой ток покоя (меньше тока отпускания реле Р1), устанавливаемый при налаживании автомата. В это время контакты Р1/1 реле Р1 разомкнуты и, следовательно, исполнительная цепь выключена. При появлении звукового сигнала (громкий разговор, шум и т. п.) колебания низкой (звуковой) частоты от микрофона усиливаются Т1 и Т2 и с нагрузочного резистора R5 поступают на выпрямитель. Отрицательные полуволны выпрямленного напряжения (см. графическое изображение над диодом (Д) на рис. 61) подаются на базу транзистора ТЗ и одновременно заряжают конденсатор С4. Если звуковой сигнал достаточно сильный и конденсатор зарядится до напряжения 0,25-0,3 В, то коллекторный ток транзистора увеличится настолько, что реле Р1 сработает и включит исполнительную цепь. Когда разговор перед микрофоном прекратится, конденсатор С4 почти полностью разрядится, коллекторный ток транзистора ТЗ уменьшится до исходного значения, реле Р1 отключится, а его контакты Р1/1, разомкнувшись, обесточат исполнительную цепь.
Какова роль резистора R1? С его помощью изменяют уровень сигнала, поступающего от микрофона на вход УНЧ, и тем самым регулируют чувствительность акустического реле.
Электромагнитное реле может быть типа РЭС-10, РЭС-9, РЭС-1, РНК с током срабатывания до 30-40 мА. Напряжение источника питания Uпит должно быть на 20-30% больше напряжения срабатывания используемого электромагнитного реле. Транзисторы - любые маломощные низкочастотные р-n-p-типа (МП39- МП42) с коэффициентом усиления не менее 20. Если напряжение источника питания более 15 В, но не больше 30 В, то транзистор Т3 должен быть типа МП40А, МП25, МП21.
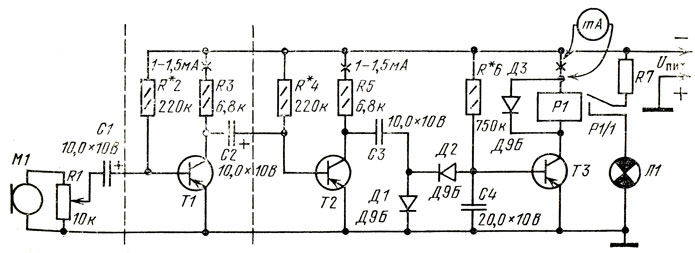
Рис. 62. Принципиальная схема акустического реле
Номиналы резисторов R3 и R5, являющихся нагрузками транзисторов Т1 и Т2 усилителя, могут быть в пределах 4,7-8,2 кОм. Сопротивление и мощность рассеяния резистора, зависящие от используемой лампочки Л1, рассчитайте сами.
Транзистор Т1, резисторы R2, R3 и конденсатор С2 (на рисунке заштрихованы) пока не монтируйте, чтобы испытать автомат с однокаскадным усилителем, но обязательно оставьте для них место. Конденсатор С1 соедините отрицательной обкладкой непосредственно с базой транзистора Т2.
Сначала, включив в коллекторную цепь транзистора Т3 миллиамперметр и подобрав резистор R *6, установите в этой цепи ток не более 2-4 мА. Он должен быть меньше тока отпускания реле. Затем подключите параллельно резистору R *6 другой резистор сопротивлением 15-20 кОм. При этом коллекторный ток должен резко увеличиться, а реле сработать. Удалите второй резистор - коллекторный ток должен уменьшиться до исходного значения, а реле отпустить якорь. Так вы проверите, работает ли электронное реле автомата.
Режим работы транзистора усилителя Т2 устанавливайте так же, как в подобных каскадах приемника, - подбором резисюра в базовой цепи (в нашем случае резистора R4). Ток покоя коллекторной цепи транзистора может быть в пределах 1-1,5 мА.
А теперь подключите к входному резистору R1 микрофон, например, типа МД-47 или абонентский (радиотрансляционный) электродинамический громкоговоритель, который будет выполнять роль микрофона. Движок резистора установите в верхнее положение. Следя за показаниями миллиамперметра в коллекторной цепи транзистора Т3, громко произнесите перед микрофоном (или перед диффузором громкоговорителя) протяжный звук "а-а-а". Коллекторный ток транзистора должен при этом увеличиться, а реле срабатывания включить исполнительную цепь. Автомат, следовательно, работает.
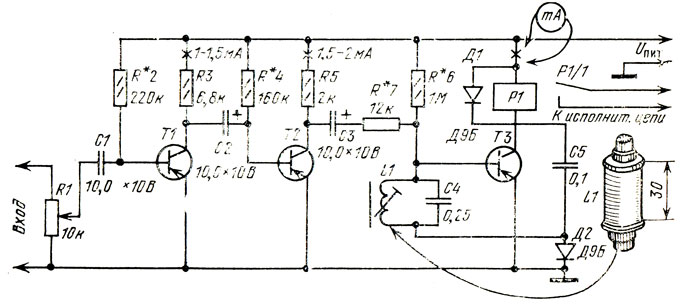
Рис. 63. Принципиальная схема селективного акустического реле
Характерная особенность второго варианта (рис. 63) акустического реле - селективность, т. е. избирательность. Как это понимать? Если предыдущее реле срабатывало при любом звуковом сигнале, независимо от его частоты, то это реле чувствительно в основном лишь к сигналу той частоты, на которую оно само настроено.
Как работает такое электронное реле? Вы знаете, что сопротивление колебательного контура для сигналов различных частот неодинаково. Для колебаний, частоты которых совпадают с собственной частотой контура, оно во много раз больше, чем для колебаний всех других частот. Это свойство колебательного контура и лежит в основе принципа этого варианта акустического реле.
Допустим, что собственная частота контура L1C4 равна 1000 Гц, а от УНЧ на вход электронного реле поступает сигнал частотой, скажем, 300 Гц. Для сигнала такой частоты сопротивление контура чрезвычайно мало, все его напряжение падает (теряется) на резисторе R *7. Но если частота входного сигнала равна или близка 1000 Гц, для которой сопротивление контура велико (значительно больше сопротивления резистора R *7), то почти все напряжение сигнала будет выделяться на контуре и усиливаться транзистором Т3. Усиленный низкочастотный сигнал снимается с обмотки реле Р1 и через конденсатор С5 подается на диод Д2 для выпрямления.
При конструировании различных моделей, управляемых голосом, часто используют акустические автоматы, включающие исполнительные механизмы при подаче звукового сигнала. Источником сигнала может быть свисток, хлопок в ладоши или громко сказанное слово, например, "Свет!".
Познакомимся с весьма удачной схемой такого автомата для включения различных механизмов, который можно использовать для дистанционного управления роботом.
Исполнительным узлом может быть магнитофон, управляемый выходным реле автомата. Тогда, если записать на магнитную ленту определенную программу ответов, автомат будет "отвечать" на вопросы. Выходное реле автомата срабатывает сразу после окончания звукового сигнала, удерживается в таком режиме несколько секунд и тут же выключается. Автомат состоит из микрофона, УНЧ, выпрямителя, интегратора, эмиттерного повторителя, триггера Шмитта, импульсного усилителя, ждущего мультивибратора и исполнительного узла.
Принципиальная схема автомата показана на рис. 64*). Транзисторы Т1 - Т3 образуют трехкаскадный усилитель НЧ, усиливающий сигнал, поступающий на его вход от микрофона Ml. Во время работы исполнительного механизма микрофон отключается от входного усилителя контактами Р1/1 выходного реле Р1, иначе громкоговоритель Гр1 исполнительного узла звуковым сигналом будет включать автомат. Чувствительность усилителя НЧ регулируют переменным резистором R1.
* (Акустический автомат разработан Н. Дробницей.)
Выпрямитель на диодах Д1 и Д2 преобразует выходной сигнал УНЧ в пульсирующий ток отрицательной полярности, который заряжает конденсатор С5 интегратора. Для увеличения времени разряда этого конденсатора служит каскад на транзисторе Т4, включенном по схеме эмиттерного повторителя. Большое входное и малое выходное сопротивления этого каскада необходимы для работы следующего узла автомата - триггера Шмитта на транзисторах Т5 и Т6. Пока напряжение на базе транзистора Т5 не превышает падения напряжения на резисторе R11, включенном в цепь эмиттеров транзисторов Т5 и Т6, транзистор Т5 закрыт, а транзистор Т6 открыт. Как только напряжение на базе транзистора Т5 превысит падение напряжения на резисторе R11, транзистор Т5 начинает открываться, а Т6 закрываться. Закрывание транзистора Т6 приводит к уменьшению падения напряжения на резисторе R11, что способствует открыванию транзистора Т5. В результате происходит переход транзисторов Т5 и Т6 из одного режима в другой. При понижении напряжения на базе транзистора Т5 транзисторы триггера переключаются в начальное состояние.
Импульсный усилитель на транзисторе Т7 служит для получения положительного импульса, который используется для запуска ждущего мультивибратора на транзисторах Т8 и Т9. На его вход подается отрицательный импульс, образованный спадом импульса триггера Шмитта при открывании транзистора Т6. Одиночные импульсы длительностью 1,5-3 с, создаваемые ждущим мультивибратором и усиливаемые транзисторами Т10 и Т11, используются для включения выходного электромагнитного реле Р1 автомата. Это реле, являющееся нагрузкой транзистора Т11, срабатывая, контактами Р1/1 отключает микрофон и включает исполнительный узел.
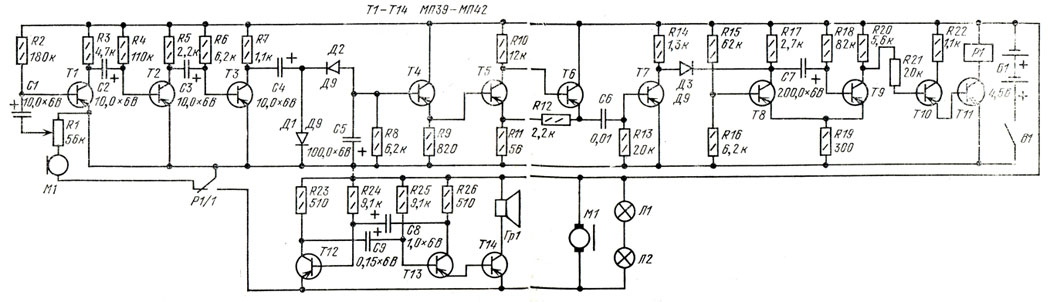
Рис. 64. Принципиальная схема акустического автомата
Исполнительный узел обеспечивает подачу звукового и светового сигналов. В него входят: мультивибратор на транзисторах Т12 и Т13 с усилителем тока на транзисторе Т14, громкоговоритель Гp1. электродвигатель M1 и сигнальные лампочки Л1 и Л2 (например, "глаза" робота). Для уменьшения тока, потребляемого громкоговорителем, скважность импульсов мультивибратора около шести. Узкий отрицательный импульс используется для открывания транзистора Т14, нагрузкой которого служит громкоговоритель.
Детали. Для автомата используются любые маломощные низкочастотные транзисторы с коэффициентом Вст = 30-40; диоды Д1-Д3 типа Д9 с любым буквенным обозначением; резисторы типа МЛТ-0,25, конденсаторы К52-1КЛС. Роль микрофона может выполнить любой головной телефон, например ТОН-2.
Реле P1 типа РЭС-10, паспорт РС4, 524, 304, с несколько ослабленными пружинами, чтобы оно срабатывало при напряжении 3 В. Если использовать реле РЭС-10 другого паспорта, его обмотку надо удалить, а вместо нее намотать провод ПЭВ-1, 0,12 до заполнения каркаса. Громкоговоритель может быть любого типа.
Источником питания автомата служит батарея 3336Л или три элемента 373, соединенные последовательно.
Налаживание. После проверки монтажа по принципиальной схеме подбором резисторов R2, R4 и R6 устанавливают на коллекторах транзисторов Т1-Т3 напряжения, равные 2,3 В. Затем проверяют работу УНЧ. Для этого к конденсатору С5 подключают высокоомный вольтметр с пределом измерений 5-10 В и подают на входы усилителя сигнал от микрофона. Напряжение на конденсаторе интегратора должно плавно увеличиваться до 1 - 1,5 В, а после прекращения сигнала плавно уменьшаться.
Потом проверяют триггер Шмитта. На это время вход усилителя замыкают, между коллектором транзистора ТЗ и базой транзистора Т5 включают переменный резистор на 20-30 кОм, а между эмиттером транзистора Т6 и положительным источником питания - вольтметр. С уменьшением сопротивления переменного резистора, когда транзистор Т4 открывается, падение напряжения на резисторе R9 должно увеличиваться, а с увеличением его сопротивления, наоборот, уменьшаться. При напряжении 0,1-0,2 В на базе транзистора Т4 триггер должен сработать, при этом транзистор Т6 закроется и стрелка вольтметра вернется к нулевой отметке.
Напряжение на коллекторе транзистора Т7 импульсного усилителя должно быть равно напряжению источника питания. Работу этого каскада автомата можно исследовать только с помощью низкочастотного осциллографа.
Ждущий мультивибратор налаживают следующим образом. Сначала, измеряя напряжение на участке эмиттер - коллектор транзистора Т9, проверяют, открыт ли транзистор. При открытом транзисторе это напряжение не должно превышать 0,1-0,2 В. Если напряжение больше 0,2 В, то уменьшают сопротивление резистора R18. Затем подбирают резистор R15, добиваясь, чтобы транзистор Т8 закрылся.
Длительность импульса ждущего мультивибратора зависит от емкости конденсатора С7 и сопротивления резистора R18. Регулировать выдержку времени только увеличением сопротивления резистора R18 нежелательно, так как транзистор Т9 при Bст<30 полностью не откроется. При кратковременном соединении коллектора транзистора Т7 с его эмиттером ждущий мультивибратор должен запускаться, а электромагнитное реле Р1 срабатывать. С помощью таких устройств можно сделать систему звукового управления роботом или его ЭВМ. Система звукового управления включает в себя небольшой переносный электронный генератор звуковых команд и установленное в модели робота приемное устройство. На рис. 65 показана схема генератора звуковых команд, а на рис. 66 приемного устройства звуковых команд. С помощью первой схемы можно различать звуки, а с помощью второй - вычислительная машина робота может выполнять команды, поданные звуковым генератором с расстояния 8-10 м. Схема переносного генератора звуковых команд состоит из трех мультивибраторов, генерирующих частоты 480, 640 и 840 Гц, двухтактного усилителя сигналов мультивибраторов и выходного динамика. Выходы мультивибраторов подключаются к усилителю сигналов через контакты трех кнопок. При такой системе с помощью первого генератора подаются команды на "сложение" (f>1 = 480 .Гц), с помощью второго - на "сброс" (f2 = 640 Гц); при нажатии третьей кнопки на усилитель, а следовательно, и в динамик поступает сигнал на "вычитание" (f3 = 840 Гц). Три отдельных мультивибратора с самостоятельным включением обеспечивают четкую работу системы телеуправления. Но при необходимости схему можно упростить, поставив только один мультивибратор с переключающимися конденсаторами и резисторами.
В зависимости от расстояния между передатчиком и приемником мощность выходного динамика может быть выбрана от 0,1 до 3-5 Вт. В последнем случае придется собирать двухтактный усилитель на большую мощность (например, по схеме усилителя приемника "Спидола").
В схеме приемного устройства звуковых команд робота (рис. 66) сигналы команд, воспринимаемые динамическим микрофоном М, усиливаются двумя каскадами на транзисторах Т1 и Т2 (МП 103), а затем через эмиттерный повторитель (на транзисторах Т3 (1116)), поступают на входы трех фильтров, настроенных на частоты 480, 640 и 840 Гц.
Для выбранного диапазона частот можно использовать катушки индуктивности с сердечниками на ферритовых тороидальных кольцах с магнитной проницаемостью 1000-2000 и наружным диаметром 10-13 мм. Для получения индуктивности порядка 0,5 Гц необходимо намотать внавал около 1000 витков провода ПЭ 0,08-0,1. Резонансная емкость контура для частоты 840 Гц должна быть порядка 0,1 мкФ, для 640 Гц 0,2-0,25 мкФ и для 480 Гц 0,4-0,5 мкФ.
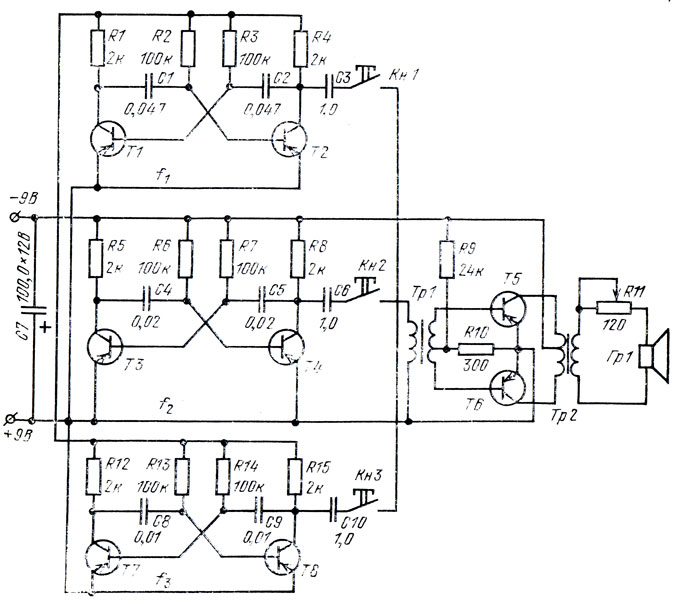
Рис. 65. Генератор звуковых команд
Настраивать резонансные контуры на выбранные частоты командных мультивибраторов лучше всего с помощью звукового генератора и осциллографа. Но в крайнем случае можно обойтись миллиамперметром на 30-50 мА, включенным в цепь выходного реле схемы. Настройка идет по максимуму показаний прибора, когда на вход схемы подаются сигналы с мультивибраторов.
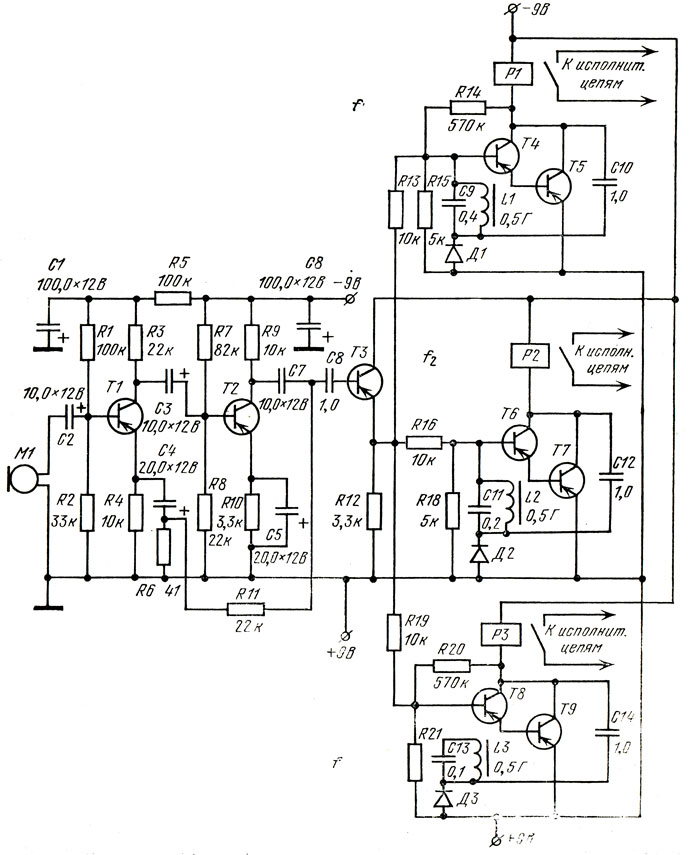
Рис. 66. Приемное устройство звуковых команд
Вот фактически и весь канал телеуправления от генераторов звуковых команд до выходных реле приемных устройств. К ним подключается дешифратор - электромагнитный шаговый искатель. Посмотрим, как он используется для операции сложения.
Допустим, командная кнопка Кн1 (см. рис. 65) нажата три раза - движок искателя переместится на три ламели. Если вслед за этим набрать цифру 7, то искатель переместится на десятую ламель, если 8 - то на одиннадцатую и т. д. Подавая через ламели шагового искателя напряжение, включающее светящиеся цифры от 1 до 10 или 20, мы "научим" модель робота, например, решать простейшие задачи на сложение.
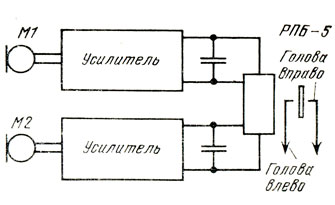
Рис. 67. Устройство 'слуха'
Задачу на вычитание робот может решить только с помощью искателя, имеющего обратный ход. На частоте 480 Гц набирается уменьшаемое число, а на частоте 840 Гц - вычитаемое. Ламель искателя останавливается на разность. При команде "Сброс" искатель приходит в нулевое, начальное положение.
Если выходные контакты искателя связать с исполнительными механизмами робота, то с помощью звукового генератора можно управлять не только его "математическими способностями", но и всем механизмом.
Используя по два микрофона, усилителя и поляризованных реле, можно сделать устройство "слуха" (рис. 67), поворачивающее голову робота в сторону источника звука.
Звуковое управление можно осуществлять свистком, свирелью или голосом. Наиболее четко схемы "слуха" работают при использовании в качестве источника сигналов электронного генератора стабильных звуковых команд. Он размещается в пульте управления роботом. Но это не обязательно. Его можно вмонтировать в электросаксофон, с которым удобнее вести музыкальную "беседу" с роботом.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'