Модели логического поведения животных
На основе описанных схем нервных сетей можно создать технические модели простейших логических систем.
Простейшие игрушки-роботы, состоящие всего из нескольких деталей (чувствительных, исполнительных и коммутирующих устройств), создавались и создаются и кибернетиками-любителями для развлечения и учеными для решения серьезных задач. Многие из них описаны в литературе и имеют большое принципиальное значение.
Одной из первых таких игрушек-роботов была "черепашка" англичанина Уолтера Грея (рис. 97). Это миниатюрная тележка на колесиках, снабженная двумя электромоторчиками: один вращает колеса, другой поворачивает руль. На тележке кроме источника питания установлены также фотоэлемент, электрический контакт с усиком, замыкающим его при соприкосновении с препятствием; несколько реле и электрическая лампочка и т. д. Несмотря на то, что "черепашка" является примитивным устройством, она обладает любопытными свойствами. В темноте или при слабом свете она беспорядочно ползает, будто что-то ищет, натыкаясь на препятствия, пытается их обойти. При достаточно сильном источнике света "черепашка" решительно направляется в его сторону. Однако, подойдя к свету слишком близко, она поворачивается и двигается вокруг источника света, находя для себя "оптимальные условия" и непрерывно поддерживая их.
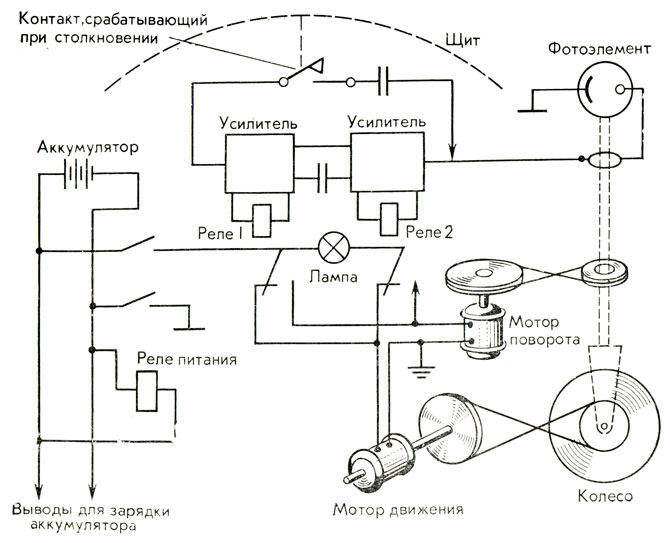
Рис. 97. Схема 'черепашки' Уолтера Грея
Интересна также игрушка-робот Эдмунда Беркли, которую он построил с помощью школьников. Она представляет собой тележку с моторным приводом и моторным управлением, но у нее больше чувствительных, коммутирующих и исполнительных элементов, чем в "черепашке" Грея. Игрушка "специализирована" для определенной работы - собирания с пола разбросанных в беспорядке белых шариков (мячей для игры в гольф) и складывания их в определенном месте. Авторы назвали игрушечного робота "белка" по аналогии с живой белкой, собирающей орехи и складывающей их в гнездо. "Белка" имеет два фотоэлемента - две "лапки", которые могут раздвигаться или сдвигаться на уровне пола, образуя чашечку, язычок внутри чашечки и металлический хвостик, волочащийся по полу. Кроме того, в "организме" "белки", т. е. в ее схеме, имеются коммутирующие реле и фильтр, позволяющий различать постоянный и переменный токи.
В какой же обстановке работает "белка"? Большая пустая комната освещена лампами накаливания. По полу в беспорядке разбросаны белые шарики. В одном из углов лежит металлический лист, освещенный люминесцентной лампой, - это "гнездо" "белки". "Белка" наугад ищет, пока в поле зрения фотоэлементов -"глаз" - не попадает белый шарик. Тогда она направляется к нему, раздвигает "лапки", останавливается, сдвигает "лапки", захватывая шарик. "Язычком", находящимся между "лапками", "белка" обнаруживает шарик. Затем она поворачивается и ищет "гнездо". Поскольку оно освещено мигающим светом люминесцентной лампы (в отличие от непрерывного света ламп накаливания), электрический фильтр позволяет ей распознать направление. "Белка" направляется к гнезду, заползает на металлический лист и останавливается на нем, так как замыкание контакта между листом и ее металлическим хвостиком дает знать, что она "дома". "Белка" раздвигает "лапки", выбрасывая шарик, и снова направляется на поиски следующего шарика.
Схему коммутации между чувствительными и исполнительными элементами можно очень быстро и без труда составить с помощью законов алгебры логики, после того как сформулированы все операции, которые должна выполнять "белка".
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'