2.4. Как управляют роботами
Управляющие устройства промышленных роботов осуществляют программное управление перемещениями звеньев манипулятора и обслуживаемого им технологического оборудования. Устройство программного управления состоит из 3 основных частей: запоминающего устройства, блока управления переходами и временного устройства. Задание программы производится с пульта управления роботом с помощью штекеров, кнопок или клавиш. Введенная программа хранится в запоминающем устройстве до тех пор, пока манипулятор будет отрабатывать заданную последовательность движений. При изменении выполняемой задачи программа стирается и в запоминающее устройство записывается новая программа. Успехи современной микроэлектроники привели к уменьшению габарита перепрограммируемых запоминающих устройств. В системах управления современными промышленными роботами используют сменные блоки запоминающих устройств, в которых записаны программы для разных режимов работы робота (рис. 10). Программы записываются заранее, и оператор может изменить программу робота за несколько секунд путем замены сменного блока памяти так же, как мы меняем кассету в магнитофоне.
Рис. 10. Сменный запоминающий блок управляющего устройства робота (общий вид)
Временное устройство формирует необходимые по программе выдержки времени. Например, после прихода руки манипулятора в заданную точку дается задержка последующего движения на время, необходимое для захвата заготовки (кожи, ткани и т. п.) схватом манипулятора. Время задержки выбирается таким, чтобы гарантировалась отработка управляющей команды.
Блок управления переходами контролирует окончание отработки предыдущего шага (кадра) программы, хранит номер отрабатываемого шага и выдает разрешающий сигнал на выдачу следующей команды. Если по каким-либо причинам программа прерывается, то блок управления переходами запоминает номер шага программы, на котором она оборвалась; после устранения помех для дальнейшего выполнения программы ее отработка может быть начата именно с этого шага.
Для неочувствленного робота первого поколения, работающего по жесткой программе, оператор является единственным источником информации о требуемых действиях, последовательность которых вводится в запоминающее устройство робота в виде программы. Эту программу робот должен затем отрабатывать в автоматическом режиме, уже не получая никакой информации из окружающей среды. Поэтому до начала программирования робота оператор определяет последовательность действий и величину перемещений манипулятора и технологического оборудования, после чего составляет управляющую программу и вводит ее в запоминающее устройство системы управления робота. Существует несколько способов составления и ввода программы:
1. Расчет и составление программы оператором и ввод ее в запоминающее устройство. В этом случае информация управления проходит от оператора к пульту управления и запоминающему устройству.
2. Ввод программы с пульта в режиме ручного управления для однократного (пробного) выполнения каждой отдельной операции. Программа каждой операции и их последовательность записываются в запоминающее устройство. После этого вся программа действий может отрабатываться автоматически. Путь прохождения управляющих команд: оператор - пульт управления - блок управления переходами - запоминающее устройство.
3. Обучение с вводом программы при механическом перемещении манипулятора рукой человека - оператора. Последовательность выполнения движений и величина отдельных перемещений записываются в запоминающее устройство и хранятся там в течение всего времени выполнения роботом заданной программы действий. Обычно движения схвата манипулятора копируют движения руки квалифицированного рабочего.
В дальнейшем при работе робота в автоматическом режиме по заданной программе электрические сигналы с выхода управляющего устройства поступают на приводы манипулятора и технологического оборудования. Под воздействием этих сигналов манипулятор совершает требуемые движения, а оборудование включается и выключается в нужные моменты времени.
Программа управления имеет определенную структуру, содержащую блоки информации о положении манипулятора и о времени (рис. 11). Эти блоки объединены командами перехода. Простейшей единицей программной информации является число, представляющее для робота команду и соответствующее единичной операции (например, перемещение одного из звеньев манипулятора, открытие или закрытие схвата, выдержка времени перед следующим движением, выдача сигнала на включение оборудования и т. п.).
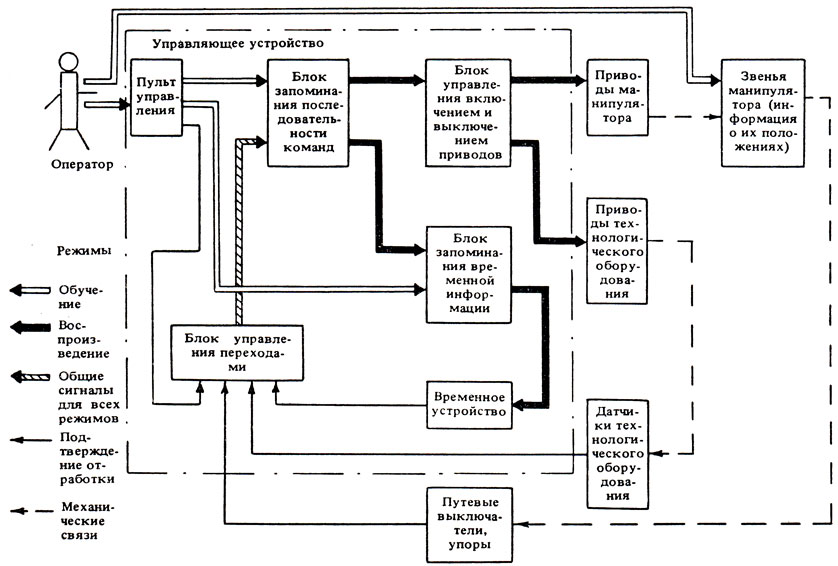
Рис. 11. Схема управления промышленным роботом по цикловой программе
Группе единичных операций, обеспечивающих выполнение законченной смысловой операции (например, перемещение схвата манипулятора на заданную позицию для захвата тканевой или кожаной заготовки при одновременной обработке в рабочей машине предыдущей заготовки), соответствует группа определенных чисел. Эта группа чисел называется кадром программы. Несколько кадров объединяются в подпрограммы, которые обеспечивают выполнение роботом небольшой законченной последовательности действий.
Порядок выдачи управляющим устройством команд, кадров и подпрограмм на отработку движений определяется заложенным в память принципом воспроизведения программы: по жесткой последовательности или с возможностью изменения заданной последовательности по некоторым внутренним или внешним по отношению к роботу условиям.
Внутренние условия задаются оператором на пульте управления или он записывает их предварительно в запоминающее устройство. Работа по внутренним условиям является для робота режимом работы по жесткому алгоритму, так как внутренние условия, заданные оператором, в процессе отработки программы не меняются. Примером работы робота по внутренним условиям является укладка бобин с нитями в мерную тару, где необходимо подсчитывать число уложенных бобин для определения степени заполнения тары и от цикла к циклу выдавать новые координаты очередной свободной ячейки тары.
Информационные сигналы о внешних условиях отражают ход технологического процесса. При поступлении их в управляющее устройство робот может переходить на выполнение другой программы, отрабатывать или пропускать отдельные кадры программы, изменять отдельные единичные команды, переходить на работу по внутренним условиям и т. п. Это позволяет роботу вовремя реагировать на все те изменения в технологическом процессе, возможность появления которых была заранее предусмотрена при программировании. Управление по сигналам внутренних и внешних условий предусмотрено во всех управляющих устройствах современных промышленных роботов. Эти сигналы поступают в блок управления переходами и изменяют номер следующей выполняемой команды.
Способ выработки сигнала окончания отработки очередного кадра программы определяет построение блока управления переходами. В промышленных роботах используются три основных способа выработки этих сигналов: по сигналам датчиков, временной и комбинированный.
В первом случае информацию о выполнении предыдущего шага выдают датчики, расположенные в самом роботе и обслуживаемом им оборудовании, во втором - сигнал перехода к следующему кадру программы вырабатывается временным устройством по истечении определенного промежутка времени, достаточного для отработки предыдущего кадра. В третьем случае в качестве информации используют как сигналы датчиков, так и временной способ.
При временном способе выработки сигналов перехода датчики отсутствуют. Подтверждения фактической отработки единичных операций при этом не происходит, и робот работает как бы вслепую.
Практически все современные промышленные роботы и построенные на их базе роботизированные технологические комплексы оснащены различными датчиками. Это позволяет в любой момент времени иметь в управляющем устройстве достоверную информацию о протекании технологического процесса и гибко реагировать на все происходящие в нем изменения.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'