Манипулятор
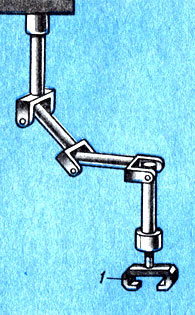
Рис. 14. Механическая 'рука' робота - манипулятор; 1 - схват (рабочее звено)
Исполнительный механизм робота - это его механическая рука или, как ее еще называют, манипулятор. Манипулятор состоит из шарнирно соединенных звеньев (рис. 14), как рука человека из костей, связанных суставами. Последнее (рабочее) звено 1 манипулятора, называемое схватом, является аналогом кисти (человеческой руки. Число звеньев у манипулятора бывает обычно в пределах от двух (как на рис. 15) до шести (рис. 16) в Зависимости от назначения и области применения робота. Звенья (подвижны относительно друг друга и могут совершать вращательные или поступательные движения (рис. 17,б, в, г, д, е) в отличие от человеческой руки они могут еще и удлиняться (см. рис. 17, а). Благодаря этому схват может двигаться по любой, самой причудливой траектории (рис. 18).
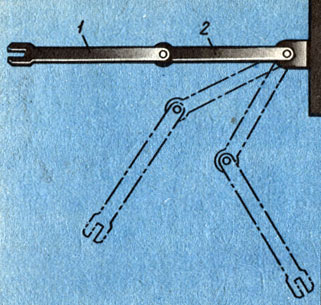
Рис. 15. Схема двухзвенного манипулятора
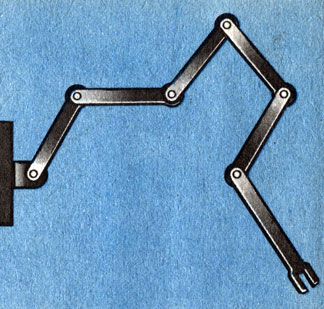
Рис. 16. Схема манипулятора, состоящего из шести звеньев
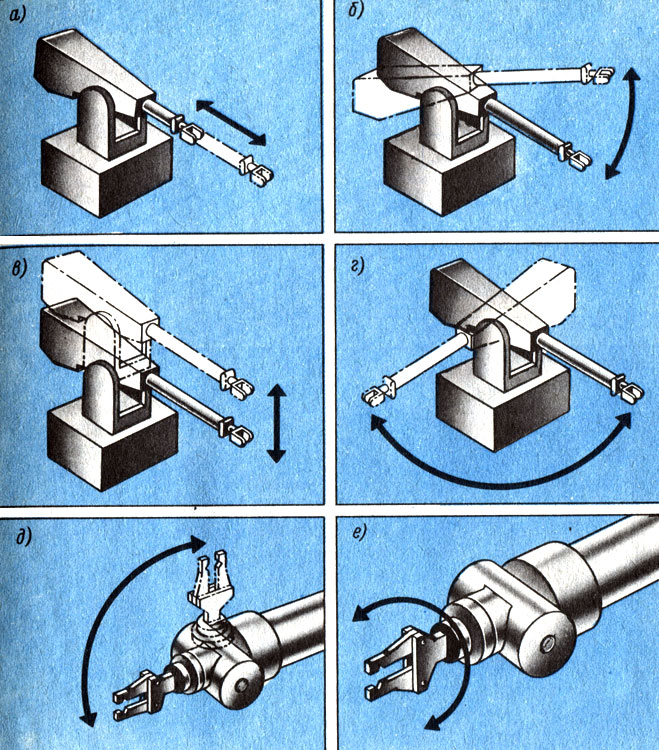
Рис. 17. Возможные движения манипулятора (показаны стрелками):
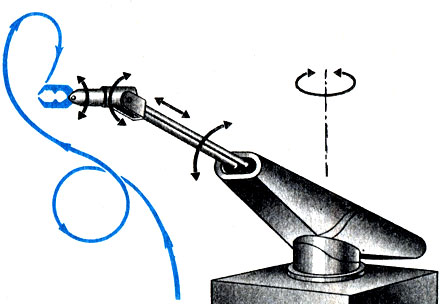
Рис. 18. Совместные перемещения звеньев позволяют схвату описывать в пространстве (ограниченном размерами и конструкцией манипулятора) траекторию практически любой формы
Схват, как видно из его названия, служит для удержания и переноса предметов. Он может быть самой разнообразной конструкции: похожим на клешню краба (рис. 19) или на кулачковый патрон, как у дрели, в виде мягких резиновых пальцев (рис. 20), в которые подается воздух, чтобы они приняли нужную форму (эта конструкция схвата применяется для работы с хрупкими предметами: электролампами, радиоэлементами), а может иметь и другой, удобный для конкретного дела вид (рис. 21).
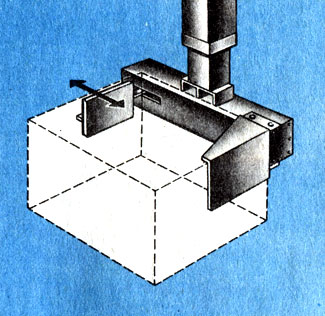
Рис. 19. Схват клешнеобразной формы
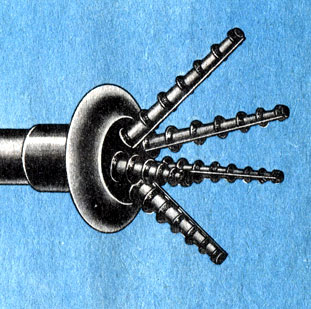
Рис. 20. Надувной схват с пятью гибкими резиновыми пальцами
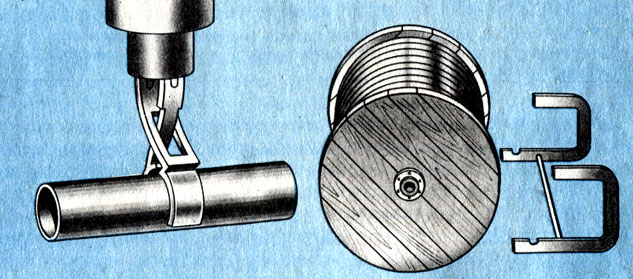
Рис. 21. Схваты, предназначенные для переноса труб (слева) и барабанов с кабелем (справа)
Число "пальцев" тоже может быть разным. Самые простые- двухпальцевые схваты похожи на обычные плоскогубцы (рис. 22); более "экзотический" вид имеют многопальцевые схваты, например, изображенные на рисунке 20 или 23. Принцип захвата нужного предмета может быть не только механическим (зажим - разжим), но и электромагнитным, если предмет из ферромагнитного материала (рис. 24, слева); схват может действовать и как вакуумные присоски (рис. 24, справа) или клейкая лента и т. д.
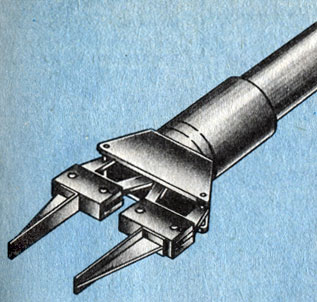
Рис. 22. Двухпальцевый схват
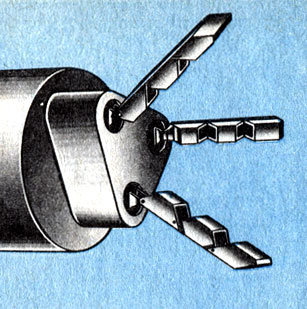
Рис. 23. Трехпальцсвый схват со сложной формой пальцев
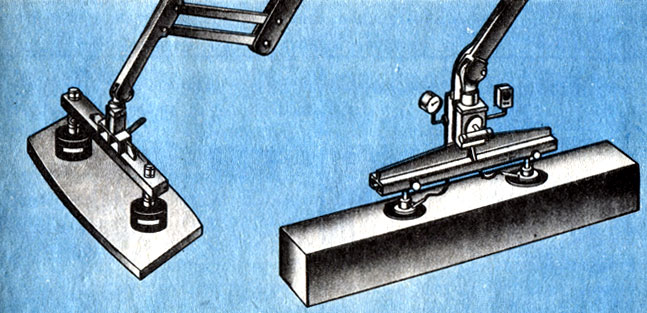
Рис. 24. Немеханические схваты: магнитный (слева), с присосками (справа)
Иногда последним звеном манипулятора служит не схват, а в зависимости от предназначения робота соответствующий рабочий инструмент: дрель (рис. 25), гаечный ключ, краскораспылитель, сварочная горелка и др. Робот с таким манипулятором может быть "сварщиком, маляром и т. д. Число, форма и способы соединения звеньев манипулятора обусловливают большое разнообразие их внешнего вида (рис. 26).
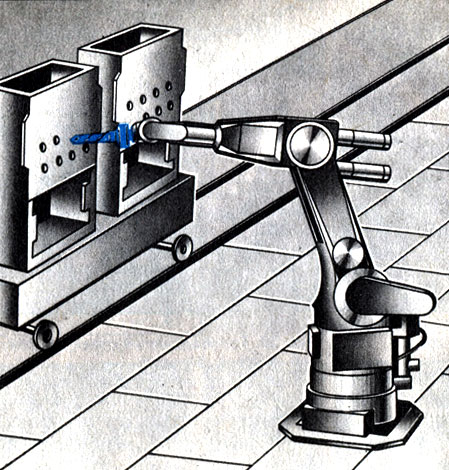
Рис. 25. Робот-сверловщик: его рабочим звеном служит дрель - она заменяет схват
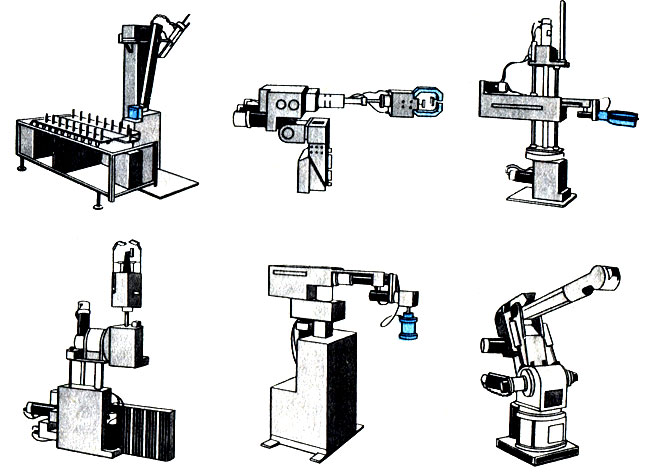
Рис. 26. Разнообразные конструкции манипуляторов, обусловленные особенностями их применения
Наиболее распространен однорукий робот (имеющий один манипулятор). Он может выполнять только одну операцию, да и то не слишком быстро. Для повышения производительности робота его иногда снабжают двумя (рис. 27), тремя и даже четырьмя одинаковыми манипуляторами, а для расширения его функций - разными манипуляторами. Например, промышленные роботы, обслуживающие прессы холодной штамповки, имеют по два разных манипулятора: один (основной) предназначен для захвата заготовки и установки ее под пресс, а другой (упрощенной конструкции) - для сталкивания готовой детали в бункер.
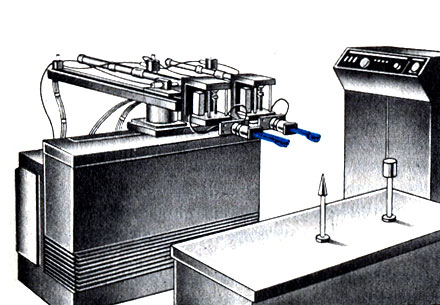
Рис. 27. 'Двурукий' робот
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'