От андроидов к манипуляторам
В нашем традиционном представлении роботы - это механические существа, созданные по образу и подобию человека. Такие роботы населяют научно-фантастические романы и кинофильмы. Они чем-то напоминают заводных кукол, появившихся в Западной Европе в эпоху средневековья (некоторые из них в какой-то степени можно даже считать программируемыми). Строго говоря, эти устройства представляют собой роботы особой разновидности, называемые андроидами: многие годы такие роботы - во всяком случае, их кинематографические варианты - волнуют людей, порождая немало кошмаров. Однако, хотя это и звучит несколько парадоксально, создание роботов, выполняющих полезные функции, по сути, началось только после того, как инженеры окончательно поняли, что построить машину, которая и внешне выглядела и вела бы себя как человек, слишком сложно. Они пошли по другому пути, направив усилия на разработку механических манипуляторов, действующих во многом аналогично человеческой руке и способных решать весьма широкий круг задач. Так, в 50-х годах появились на свет промышленные роботы. Эти устройства представляют собой некую комбинацию металлических деталей и электрического кабеля и, как правило, нисколько не похожи на человеческие конечности. Их появление в значительной мере рассеяло миф о враждебном характере робота, и это понятие получило наконец признание в деловых и технических кругах.

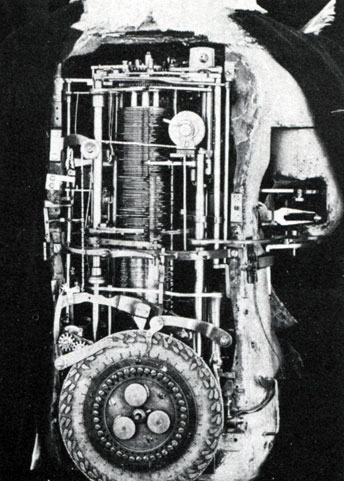
В ядерной энергетике широко применяются дистанционные копирующие манипуляторы; на снимке показан многозвенный манипулятор, разработанный фирмой 'Тейлор хайтек' и предназначенный для снятия и замены креплений термопар в ядерных реакторах
Заслуживают упоминания роботы еще одного типа, сходные с уже рассмотренными. Речь идет о дистанционно управляемом копирующем манипуляторе, т. е. о механической руке (или другом аналогичном устройстве), которая действует не автономно, как промышленный робот, а управляется оператором, находящимся от нее на значительном расстоянии. Копирующий манипулятор не заменяет, а лишь расширяет возможности человека, позволяя ему оперировать предметами на расстоянии. Наиболее типичные образцы подобных устройств встречаются на атомных электростанциях. Механическая рука, снабженная захватным приспособлением, регулирует положение клапана или топливного стержня в той части реактора, куда человек не может проникнуть, не подвергаясь опасности. Всеми движениями манипулятора управляет находящийся в отдалении оператор, который следит за действиями устройства с помощью телекамеры и каналов связи. При выполнении такого рода операций роли копирующих манипуляторов и истинных роботов нередко совпадают. Некоторые действия подобное устройство может совершать абсолютно самостоятельно - под управлением программы, содержащей ряд команд. При выполнении других функций на каких-то этапах может потребоваться вмешательство человека-оператора. В таких ситуациях оператор, постоянно контролирующий работу оборудования по радио, прерывает заранее заданную последовательность операций, осуществляемых манипулятором, и подает новые команды. Работа в строгом соответствии с определенным набором правил, а также безусловное подчинение поступающим время от времени командам более высокого приоритета обеспечивают гибкость функционирования такого класса машин, называемых гибридными роботами. По своим действиям они напоминают овчарок, которые значительную часть времени несут свою службу самостоятельно, но в конечном счете всегда подчиняются приказам хозяина. Многие специалисты полагают, что эффективность подобных устройств будет неуклонно возрастать в тех ситуациях, где настоящие роботы могут оказаться бесполезными вследствие их недостаточной гибкости. Любопытно, что в наши дни, похоже, близки к воплощению идеи некоторых изобретателей, сотни лет назад пытавшихся создать человекоподобные машины. Среди инженеров, которые в 50-60-х годах нашего столетия разработали первые образцы промышленных роботов, бытовало мнение, что изобретатели прошлого замахивались слишком на многое. Однако в свете последних достижений электронной техники и машиностроения подобная точка зрения, как видно, уже не отражает реальности. Прежде всего, из "младенческого возраста" выходит искусственный интеллект, что позволит оснастить вычислительные машины соответствующими логическими средствами. Таким образом, в ближайшее время мы, возможно, станем свидетелями появления роботов, "мозгом" которых будут компьютеры, основанные на принципах искусственного интеллекта. Эти роботы смогут получать информацию об окружающих условиях (с помощью телевизионных камер или миниатюрных радиолокаторов) и перемещаться в различных направлениях. Они будут обладать способностью принимать самостоятельные решения, например, в зависимости от того, доставлены ли своевременно нужные детали, смогут корректировать последовательность выполняемых ими операций, а не соблюдать безоговорочно заранее определенный порядок действий, невзирая на внешние условия.
Механизм куклы Писец, созданной Пьером Жаке-Дрозом, отличается исключительной сложностью; горизонтальными и вертикальными перемещениями пера в руке куклы управляют две группы передаточных колесиков
Подобные роботы-андроиды, по всей вероятности, станут реальностью в ближайшие два десятилетия, и этому в немалой степени будет способствовать то обстоятельство, что сейчас инженеры активно работают еще в одном направлении, создавая и совершенствуя исполнительные органы (т. е. "конечности") роботов. Андроид, который не способен делать то, что не составляет труда для четырехлетнего ребенка,- скажем, гладить кролика, не причиняя ему боли, или двигаться по многолюдной улице,- вряд ли принесет ощутимую пользу. Как бы то ни было, прогресс здесь заметен, и в первую очередь это связано с развитием промышленной робототехники. Так, разрабатываются устройства, обладающие исключительной "ловкостью рук", что позволит им подгонять миниатюрные комплектующие узлы в ходе производственных операций, требующих высочайшей точности. Что же касается способов передвижения, то американские и японские специалисты уже приступили к исследованиям в рамках обширных проектов по созданию шагающих роботов. В США такие исследования в основном направлены на разработку оборудования военного назначения; министерство обороны, например, выделило на реализацию одной из подобных программ 50 млн. долл. (см. главу "За пределами предприятия"). Японцы главное внимание уделяют изготовлению шагающих машин, способных работать в опасных для человека условиях, в частности внутри ядерных реакторов. Если указанные проекты осуществятся, то приблизительно к началу 90-х годов в распоряжении конструкторов появятся хотя бы некоторые компоненты, необходимые для построения человекоподобных шагающих роботов.

Среди многих блестящих изобретений Жаке-Дроза особую известность приобрела механическая кукла Писец. В XVIII в. наибольшей популярностью пользовались механические игрушки, которые копировали реальные существа (человека или животных)
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'