Управление производственным оборудованием
В 50-х годах компьютеры начали проникать на металлургические заводы и химические предприятия; однако этот процесс протекал негладко, поскольку методы управления тогда находились еще в зачаточном состоянии. Определенную роль играли вычислительные машины и в управлении режимами работы станков, в частности токарных, на которых путем резки или других операций металлические заготовки превращаются в детали. Обычно таким станком управлял рабочий, действия которого в процессе резки металла во многом напоминали работу столяра, вырезающего изделие из куска дерева. В первых станках с числовым программным управлением использовались перфоленты, на которых с помощью ЭВМ записывались команды для управления режущим инструментом.
В это время, когда все способствовало дальнейшему внедрению вычислительных машин в промышленное производство, произошло второе из упомянутых выше событий, которое сыграло важную роль в развитии робототехники. Группа американских инженеров всерьез задумалась над тем, каким образом применить теорию управления к решению общих проблем перемещения оборудования, инструментов и материалов в пределах предприятия. Они пришли к заключению, что загрузка и разгрузка - практически самые распространенные внутризаводские операции; однако технические достижения того времени (как, впрочем, и прошлого века), по существу, не дали ничего для повышения эффективности таких операций. Тогда-то и возникла мысль, что управление подъемными и транспортировочными механизмами можно поручить компьютеру. А поскольку работа компьютеров программируется, на их основе можно было создать достаточно гибкое оборудование, пригодное для работы в различных окружающих условиях. Такой подход привел к созданию первых промышленных роботов, а именно механических манипуляторов, управляемых ЭВМ. Первопроходцами здесь были два инженера: Джордж Девол и Джозеф Энгельбергер. В 1954 г. Девол запатентовал в США изобретенный им программный способ перемещения предметов между различными участками предприятия. В патенте говорилось об управляющей программе на перфокартах, сходных с теми, которые в свое время предложил Бэббидж. Указывалось, что управление погрузочно-разгрузочным оборудованием на промышленных предприятиях может осуществляться только двумя методами. Первый - это метод ручного управления, когда люди либо сами поднимают грузы, либо управляют работой соответствующих механизмов, например кранов или подъемно-транспортных рычажных устройств. Способы ручного управления весьма разнообразны, так что их можно приспособить для выполнения различных производственных операций. Однако все это обходится недешево, поскольку необходимо оплачивать физический труд людей, занятых на таких работах. Второй метод управления погрузочно-разгрузочным оборудованием - использование строго определенных алгоритмов, реализуемых посредством механизмов с кулачковым приводом. В описании к патенту Девола говорилось: "Принцип кулачкового регулирования периодически повторяющихся операций получил широкое распространение при решении специализированных задач, но каждое его применение связано со столь высокими затратами и узкой специализацией, что кулачковое регулирование используется только для автоматизации процессов крупносерийного производства".
Изобретение Девола было призвано решить именно ту проблему, которая стала своего рода "черной дырой" в науке о производственных процессах. Со времен промышленной революции в Англии в конце XVIII - начале XIX века на предприятиях систематически внедряются различные механизмы. Эта революция породила такие машины, как паровой двигатель, водяное колесо, применявшееся на текстильных фабриках, а также погрузочно-разгрузочное оборудование для выполнения однотипных операций, например тали и полиспасты, применявшиеся еще на парусных судах. Такого рода механизмы устанавливались на заводах, выпускающих большие объемы продукции, причем рабочие там скорее служили придатком машин, нежели диктовали им свою волю. С появлением подобного оборудования в промышленно развитых странах началась эпоха механизации предприятий. Однако оно практически теряло свою ценность, когда дело касалось не массового производства с характерной для него регулярностью технологических операций, а выпуска продукции малыми партиями, состав которых мог меняться в зависимости от желаний заказчика или проектных o решений. Как отмечалось в патенте Девола, погрузочно-разгрузочные машины строились ранее таким образом, что могли обслуживать лишь строго определенную номенклатуру изделий. Девол поставил целью разработать транспортировочный механизм, который можно было бы без труда приспосабливать для выполнения широкого круга операций.
Далее в тексте патента говорилось: "Настоящее изобретение впервые позволяет создать более или менее универсальную машину, которая найдет применение в самых разнообразных случаях, когда желательно циклическое управление. И в этом отношении наше изобретение обладает множеством достоинств. Оно дает возможность: избежать больших расходов, связанных с проектированием специализированных устройств с кулачковым регулированием; применять автоматически управляемые механизмы там, где ранее они казались неэкономичными, поскольку для их изготовления требовались специально сконструированные компоненты с кулачковым регулированием; серийно выпускать универсальные автоматические машины, пригодные для решения самых разнообразных задач; быстро перестраивать (а это время от времени необходимо) устройство, рассчитанное на конкретное применение, приспосабливая его к выполнению других операций.
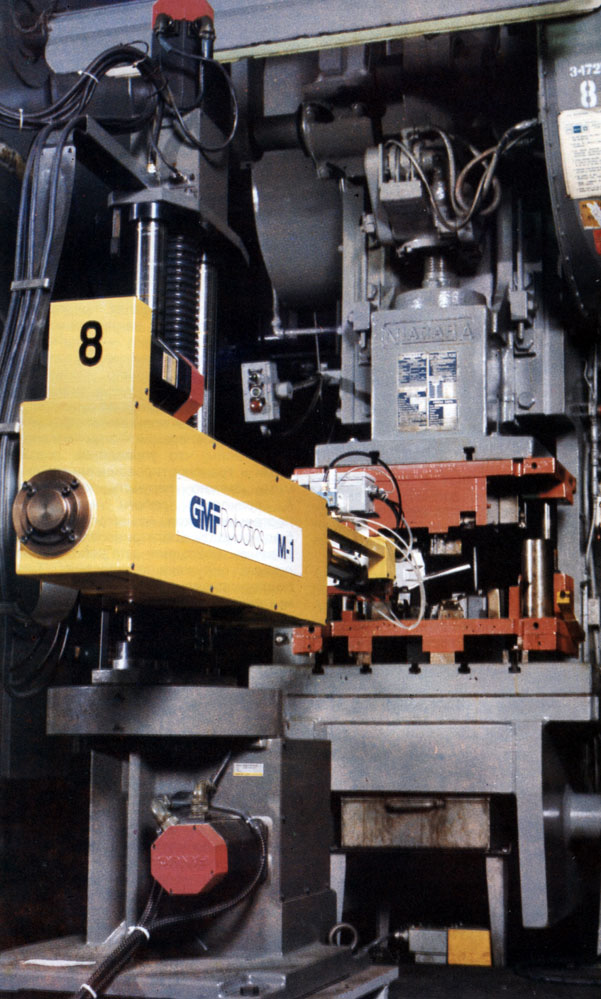
Робот М-1А фирмы GMF, появившийся на свет через 30 лет после первого изобретения Энгелбергера и Девола, загружает заготовку в штамповочный пресс на заводе по производству кузовов автомобиля 'Фишер' корпорации 'Дженерал моторе' в Колумбусе
Как можно заметить, машины с циклическим характером работы, которые прежде управлялись вручную, теперь могут быть автоматизированы, причем по желанию заказчика можно обеспечить специализацию универсального транспортировочного оборудования, а заказчик получает возможность быстро и без особых сложностей приспосабливать это оборудование к новым условиям работы".
В 1956 г. Девол познакомился с Энгелбергером, молодым инженером, работавшим тогда в одной из аэрокосмических компаний. Энгелбергер понял, что идеи Девола могли бы найти широкое применение в промышленности. Вместе с несколькими другими специалистами они организовали первую в мире робототехническую компанию "Юнимейшн" и в 1958 г. изготовили первое изделие. Название "Юнимейшн" придумал Девол. В его патенте, в частности, говорилось: "Термин "универсальная автоматизация" (Universal Automation - "Юниверсал отомейшн", или сокращенно "Юнимейшн"), по-видимому, достаточно четко характеризует цель изобретения (программируемых транспортировочных устройств). Это изобретение позволяет оснастить промышленные предприятия и склады машинами для транспортировки различных предметов, т. е. облегчает труд оператора подобно тому, как конторские машины упрощают работу служащих в учреждении". Фирма "Юнимейшн", которая в настоящее время принадлежит корпорации "Вестингауз", вплоть до начала 80-х годов занимала ведущие позиции в мировой робототех-нической промышленности. Однако в последние годы на роль лидера в этой отрасли претендует целый ряд компаний, развивающихся более динамично.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'