Тенденции развития
Любой из промышленных роботов, "прародителем" которых было устройство, изобретенное Девол ом, состоит из трех основных частей: механической руки с сочленениями и "схватом"; источника энергии; блока управления (как правило, компьютера), в памяти которого записаны команды для выполнения требуемых операций. Первый промышленный робот был установлен в 1961 г. на автомобильном заводе фирмы "Дженерал моторе" в Трентоне, шт. Нью-Джерси. Это устройство извлекало раскаленные металлические детали из формы для литья под давлением и складировало их. Эффективность новых механизмов не могли не заметить другие автомобильные компании, в том числе и фирма "Форд". Дел Хардер, управляющий предприятиями компании "Форд" в США, с энтузиазмом воспринял идеи Энгелбергера, изъявив готовность немедленно установить на своих заводах 2000 роботов, однако Энгелбергер сказал, что его компания вряд ли сможет выпускать их в таком количестве. Ведь это было лишь начало 60-х годов. Тогда Хардер ознакомил с идеями Энгелбергера других изготовителей оборудования. Благодаря этому в производство роботов включилось еще несколько компаний, в частности "Америкен машин энд фаундри" и "Борг-Уорнер".
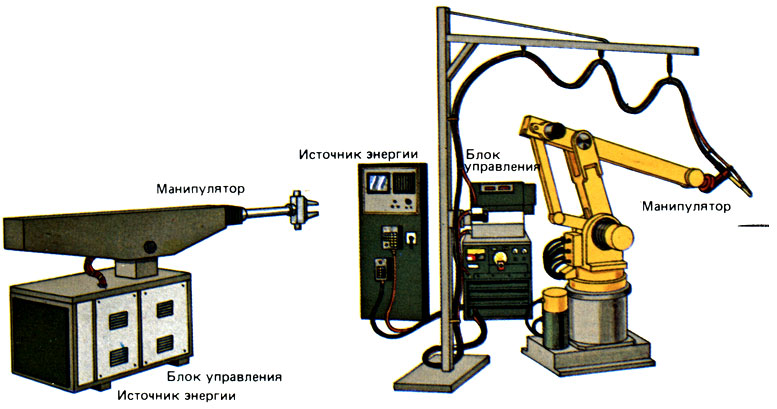
Компоненты робота. Современный промышленный робот, как правило, состоит из трех основных частей: компьютеризованной системы управления, источника энергоснабжения (электрического, гидравлического или пневматического) и собственно манипулятора, на котором смонтирован рабочий брган. Такая система изготавливается либо в форме законченного комплекса (слева), либо в виде набора отдельных узлов - как, например, показанный справа робот для дуговой сварки
Со времени появления первых промышленных роботов их конструкция в своей основе претерпела незначительные изменения. Наиболее заметная часть промышленного робота - собственно его рука (манипулятор), оснащенная схватом, или "рабочим органом". Такой манипулятор, как правило, имеет несколько сочленений, сходных с суставами конечностей человека. У наиболее совершенных роботов каждое сочленение приводится в движение его собственным, автономным, электродвигателем.
В настоящее время для промышленности выпускаются роботы-манипуляторы пяти основных типов (см. соответствующие диаграммы):
Робот, функционирующий в обычной декартовой (прямоугольной) системе координат. Он поступательно перемещается вдоль трех основных осей х, у и z (т. е. слева направо, вперед-назад и вверх-вниз).
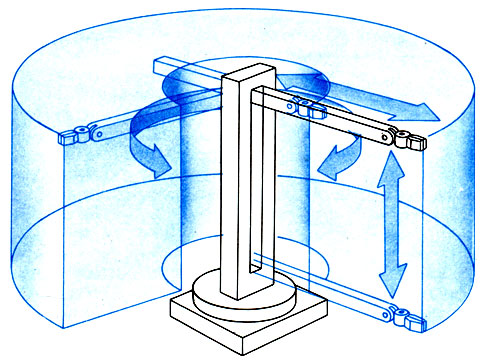
Робот с цилиндрической системой координат. Робот такого типа представляет собой горизонтально расположенный манипулятор, закрепленный на вертикальной стойке, которая жестко связана с неподвижным основанием. Манипулятор может выдвигаться и втягиваться, а также перемещаться вверх и вниз вдоль стойки. Кроме того, весь узел манипулятора может поворачиваться вокруг оси основания, но не на полный оборот. Наличие такого числа степеней свободы означает, что зона действия робота представляет собой часть цилиндра. Эта система подобна роботу с декартовой системой координат, однако вместо поступательного перемещения вдоль оси х она совершает вращательное движение
Манипулятор, работающий в цилиндрической системе координат. Он способен поворачиваться вокруг вертикальной оси, что позволяет ему выполнять операции в окружающей цилиндрической зоне.
Манипулятор, действующий в сферической (или полярной) системе координат. По характеру движений он напоминает манипулятор с цилиндрической системой координат, но в вертикальном направлении перемещается путем вращения в "плечевом суставе". Его зона действия представляет собой часть сферы.
Шарнирный манипулятор, или робот с вращающимися системами координат (ангулярная схема перемещения). Такие устройства снабжены "плечевыми", "локтевыми" и "кистевыми суставами", т. е. обладают большим сходством с конечностями человека. Отдельные сегменты манипулятора могут поворачиваться относительно указанных точек сочленения, обеспечивая тем самым его перемещение в различных плоскостях.
Системы Scara.Scara - сокращение от англ. Selective Compliance Assembly Robot Arm (сборочный робот-манипулятор с избирательной приспособляемостью). Все сочленения этих устройств, представляющих собой модифицированный вариант манипуляторов с цилиндрической системой координат, располагаются в горизонтальной плоскости, благодаря чему механизм способен "разворачиваться" подобно складной ширме. Системы Scara разработал Хироси Макино из Университета Яма-наси (Япония).
Заслуживают упоминания роботы еще двух типов, хотя пока они не нашли широкого применения в промышленности. Первый из них, Spine, сконструирован специалистами фирмы "Спайн роботикс"; в нем используется длинный хоботоподобный манипулятор, состоящий из ряда дисков, которые соединены между собой шлангами гидравлического привода. Такой робот отличается чрезвычайно большой гибкостью; по имеющимся сведениям, он обладает самой обширной зоной действия среди других'коммерческих роботов-манипуляторов. К другому типу подобных устройств относится сборочный робот IRB 1000 фирмы ASEA Robotics. Манипулятор, подобно маятнику, укреплен в двухстепенном кардановом подвесе, который может размещаться на салазках, обеспечивая линейное перемещение манипулятора. Специалисты фирмы ASEA утверждают, что это устройство может перемещаться с ускорением в 1,5 раза большим, чем у обычных роботов-манипуляторов.
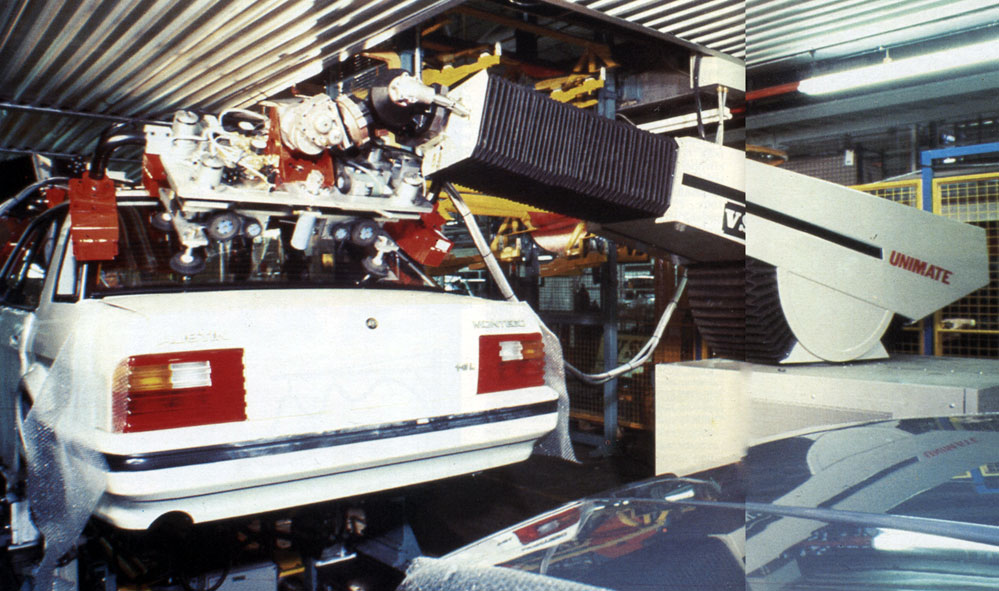
Первый промышленный робот был построен компанией 'Юнимейшн', и с тех пор робот стал одним из главных участников производственного процесса; показанный на снимке крупногабаритный робот 'Юнимейт' работает на линии по производству автомобилей 'Ровер монте-го' в Остине - автоматически вставляет задние стекла
При оценке функциональных возможностей робота указывается число его степеней свободы (подвижности), т. е. осей, относительно которых могут перемещаться или поворачиваться компоненты манипулятора. Большинство роботов-манипуляторов способно поступательно передвигаться вдоль трех ортогональных осей (декартовых координат); иначе говоря, они относятся к первому из перечисленных выше типов роботов. Сюда можно добавить три оси вращения, которые описывают характер движений в "кистевом суставе", обеспечивающих требуемую ориентацию манипулятора в конкретной точке пространства. Поворот относительно этих осей соответствует повороту, приведению-отведению и сгибанию кисти (см. диаграмму). Даже обладая шестью степенями свободы, современный промышленный робот весьма далек по своим возможностям от человеческой руки, которая способна двигаться относительно более чем 20 осей.
Важную роль в "организме" робота играет схват, или рабочий орган, который по своим функциям соответствует кисти руки человека и крепится к "запястью" манипулятора. Существует столько же типов рабочих органов, сколько и областей применения роботов. Поэтому такие устройства могут представлять собой обыкновенные клещи для захвата предметов двумя (или большим числом) "пальцами", группу присосок, специально сконструированные схваты для манипуляций хрупкими предметами, например стеклянными трубками, совки, позволяющие собирать сыпучие материалы, крюки, специальные инструменты для выполнения ряда технологических операций, таких, как сварка, резка, сверление, склеивание, окраска, воздушная сушка, очистка струей воды или сжатого воздуха и т. д. Вообще говоря, роботы, установленные в заводском цехе, могут автоматически менять свои рабочие органы в зависимости от характера выполняемой операции: промышленный робот способен, например, сначала просверлить отверстие в металлической детали, а затем самостоятельно измерить его диаметр с помощью зонда.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'