Манипуляции изделиями и заготовками
При загрузочно-разгрузочных и транспортировочных операциях робот просто-напросто заменяет пару человеческих рук. В его обязанности не входят особенно сложные процедуры. Он всего лишь многократно повторяет одну и ту же операцию в соответствии с заложенной в нем программой. Рассмотрим типичные применения таких роботов.
1. Загрузочно-разгрузочные роботы. Во многих отраслях машиностроительной промышленности используются установки для литья, резки, сверления и ковки. В большинстве случаев последовательность выполняемых ими операций весьма проста. Вначале заготовки из исходного материала загружают в производственную установку, которая затем обрабатывает их строго определенным образом, и, наконец, готовые детали извлекают из нее. Загрузку и разгрузку, как правило, выполняют рабочие или в тех случаях, когда применимы средства жесткой автоматизации, специализированные механизмы, рассчитанные на операции только одного вида. Роботы здесь могут оказаться полезными, если характер таких загрузочно-разгрузочных операций время от времени меняется.
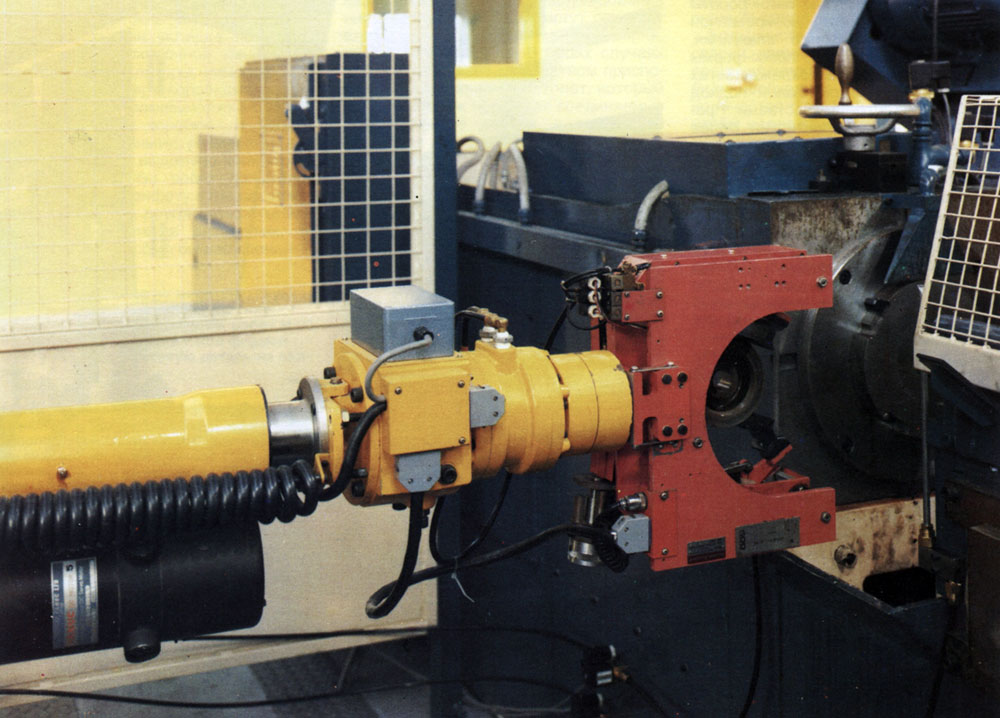
Промышленные роботы широко применяются для загрузки обрабатываемых деталей в металлорежущие станки и снятия готовых изделий. На фотографии робот Фанук 600, входящий в состав системы SCAMP, подает заготовку на протяжной станок
Компания "Метал кастингс" (Вустер, Великобритания), которая изготавливает литые алюминиевые детали для автомобильной промышленности и фирм, выпускающих бытовые товары, занимает ведущие позиции в деле применения роботов для обслуживания установок литья под давлением. В специальную ячейку установки заливается дозированное количество расплавленного металла, который с помощью поршня нагнетается в пресс-форму. Там он, как правило, находится несколько секунд, в течение которых две взаимодополняющие части пресс-формы прижимаются с силой в сотни и даже тысячи тонн. Затем под давлением металл охлаждается и затвердевает, в результате чего образуется готовое изделие, принимающее вид внутренней поверхности пресс-формы; далее части пресс-формы разделяются и извлекается отформованная металлическая деталь.
В компании "Метал кастингс" роботы используются как для дозированной разливки расплавленного алюминия, так и для извлечения из пресс-формы затвердевших изделий и охлаждения их в резервуаре с водой. Такой подход обладает двумя преимуществами. Прежде всего роботы гарантируют более строгое соблюдение требований технологического процесса: действуя в соответствии с заданной программой, они всегда вводят в установку точно дозированное количество металла. Затем в строго определенные моменты времени они извлекают из нее отформованные детали. Благодаря этому технологические условия строго соблюдаются и характеристики изделий, изготавливаемых партиями, выдерживаются исключительно точно.
Второе преимущество данного подхода заключается в том, что значительно облегчается работа оператора. Извлечение раскаленного куска металла из пресс-формы для литья под давлением - это, пожалуй, одна из самых малопривлекательных работ, и желательно, чтобы ее выполняли роботы. Тогда роль человека сведется к контролю за протеканием процесса и управлению действиями робота путем программирования.
2. Перенос изделий с одной производственной установки на другую. Во многих отраслях промышленности погрузочно-разгрузочные механизмы предназначены для перемещения изделий различной степени готовности с одного участка производственной линии на другой. И при выполнении таких операций роботы играют немаловажную роль. На заводе фирмы IBM в Покипси (шт. Нью-Йорк), выпускающем вычислительные машины, робот загружает магнитные диски (используемые для хранения программ или данных) в систему, где на них записывается нужная информация. В общих чертах такой процесс напоминает запись музыкальных произведений на грампластинки. Программа, управляющая роботом, содержит инструкции относительно того, в какую из четырех установок для записи следует загружать тот или иной "пустой" диск. Кроме того, программа задает конкретный набор команд, который соответствующая установка должна занести на диск. Тот же робот осуществляет и два других этапа этого технологического процесса. Он извлекает диск из записывающей установки и помещает его в устройство, которое струей сжатого воздуха прижимает к поверхности диска самоклеющуюся метку. Затем робот вынимает диск с помощью захватного приспособления и упаковывает его в специальный конверт.
Подобный робот разрабатывается и для английской автомобилестроительной компании "Бритиш лейланд"; этот робот будет передвигаться на гусеницах между пятью производственными системами автомобильного завода. Он сможет извлекать пластмассовый бампер (или крыло) из установки для инжекционного прессования. Затем робот переносит бампер поочередно на две другие производственные установки, первая из которых обрезает с пластмассовой детали все лишнее, а вторая вставляет в нее миниатюрные латунные вкладыши для закрепления бампера на кузове автомобиля. Далее робот помещает бампер на специальный станок, который полирует небольшие участки его поверхности. И наконец, робот снимает бампер с полировального станка и укладывает его на конвейер, транспортирующий готовые изделия в другой цех завода.
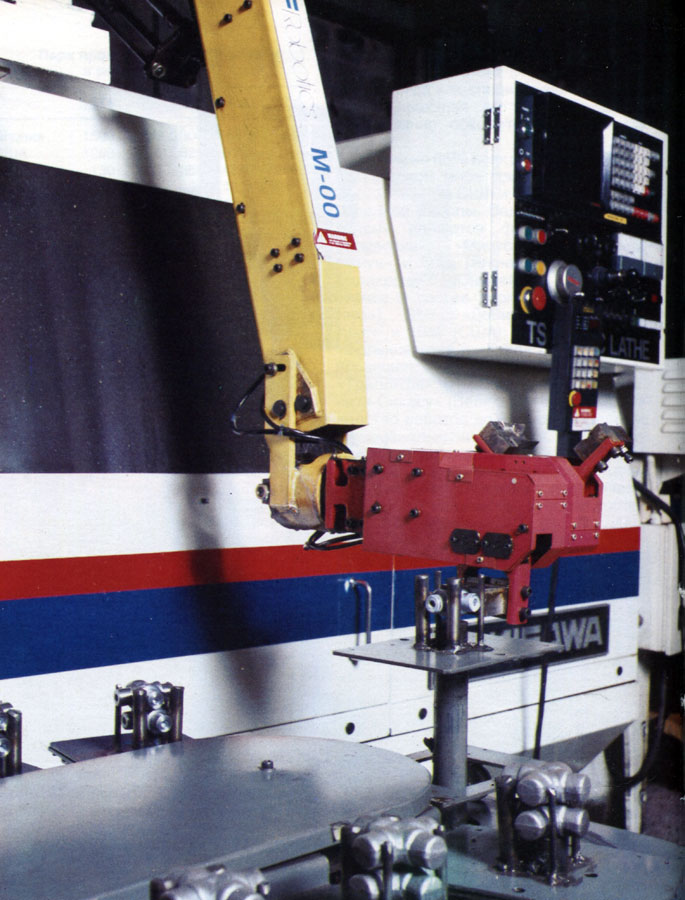
Загрузив новую металлическую заготовку в токарный станок и сняв оттуда обработанное изделие, робот М-00, изготовленный американской фирмой GMF, укладывает готовую деталь на паллету
Оригинальную разработку выполнила британская швейно-трикотажная компания "Корах". На ее швейной фабрике в Океме робот с помощью вакуумного схвата поднимает небольшой кусок ткани, обработанный швеей-мотористкой, и укладывает его в один тюк с другими кусками ткани, после чего тюк автоматически перемещается на участок, где выполняются другие пошивочные операции. Таким образом, робот освобождает швею от необходимости собирать готовые изделия (или детали изделий) и переносить их на другие участки. Подобные операции на большинстве швейно-трикотажных предприятий отнимают у швеи массу времени, которое можно было бы затратить на пошив изделий, увеличив тем самым производительность труда.

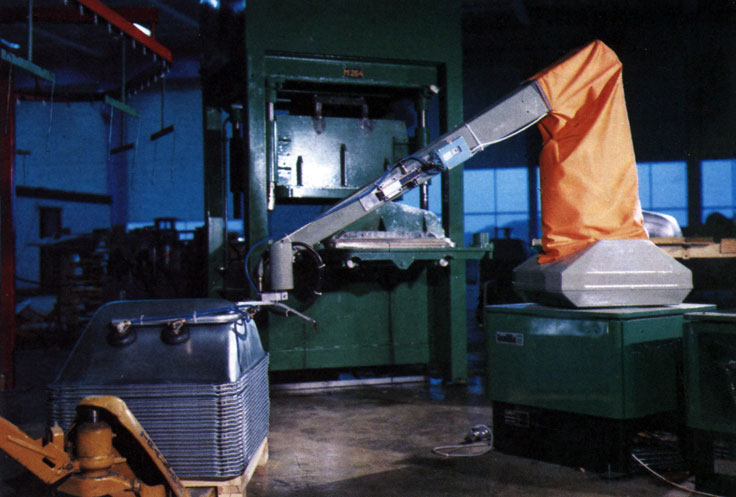
На предприятии фирмы 'Тралльфа транспорт', где выпускаются тачки, используется робот TR-3000 этой фирмы. Он снимает заготовку кузова тачки с конвейера и подает ее на гидравлический пресс. Затем робот снимает готовый кузов с пресса и укладывает его на паллету (снимок справа). Фирма 'Тралльфа' (Брюне, Норвегия) является одновременно и потребителем, и изготовителем робото-технического оборудования
3. Упаковка. Практически все бытовые и промышленные товары необходимо упаковывать, и для роботов не представляет сложности поднимать готовые изделия и помещать их в какую-либо тару. К примеру, фирма "Флаймо", выпускающая газонокосилки, применяет роботы компании "Цинциннати милакрон" для упаковки продукции, сходящей с конвейеров своего завода в Дарлингтоне. На заводах кондитерской фирмы "Кэдбери" (Бирмингем) специализированные роботы занимаются укладкой конфет в коробки. Такие укладочные машины должны быть весьма совершенными в двух отношениях. Во-первых, необходимо, чтобы они обращались с конфетами очень аккуратно: сжав шоколадное изделие слишком сильно, они могут деформировать или даже раздавить его. Во-вторых, роботы должны соблюдать высокую точность при укладке конфет в коробки. На упаковочной линии специальные манипуляторы, мимо которых движется конвейер с коробками, поднимают конфеты и помещают их в определенные ячейки коробок. В любой коробке с заданными размерами для каждой конфеты выделено конкретное "гнездо". Если бы робот попытался поместить одну конфету в гнездо, предназначенное для другой конфеты или отличающееся иными размерами, то процесс упаковки был бы нарушен.
На предприятии фирмы 'Тралльфа транспорт', где выпускаются тачки, используется робот TR-3000 этой фирмы. Он снимает заготовку кузова тачки с конвейера и подает ее на гидравлический пресс. Затем робот снимает готовый кузов с пресса и укладывает его на паллету (снимок справа). Фирма 'Тралльфа' (Брюне, Норвегия) является одновременно и потребителем, и изготовителем робото-технического оборудования'
4. Погрузка тяжелых предметов на паллеты. Помимо упаковки миниатюрных изделий, а также промышленных или бытовых товаров роботы иногда выполняют погрузку тяжелых предметов на паллеты. К таким предметам относятся, например, кули с цементом, мешки с удобрениями или крупногабаритная тара. В подобных случаях управляющая программа, как правило, указывает, каким (строго определенным) образом робот должен складывать предметы, чтобы они не упали.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'