Движущиеся роботы
Картина мира, где роботы свободно разгуливают по всей Земле и готовы взяться за любую опасную работу, способна захватить воображение каждого; однако, прежде чем она станет реальностью, ученым потребуется преодолеть множество серьезных преград.
Чтобы охарактеризовать истинное положение в области создания движущихся роботов, отметим, что ряд промышленных объединений, заинтересованных в этом виде техники, относят понятие "робот" только к манипуляторам. Когда фирма "Юнимейшн" в начале 60-х годов приступила к выпуску программируемых манипуляторов для скраски методом распыления, точечной сварки и транспортировки деталей, наиболее совершенными из автоматических движущихся машин были лабораторные устройства, весьма похожие на игрушки. Так, робот Бист (зверь), созданный в Университете Джонса Гопкинса, мог передвигаться по комнатам, удерживаясь на определенном расстоянии от стен путем систематического измерения дальности с помощью ультразвукового дальномера. Оптическая система этого робота вела поиск черных крышек настенных электрических розеток, и, как только такая крышка появлялась в поле ее зрения, робот пытался вставить в нее смонтированную на манипуляторе электрическую вилку, чтобы перезарядить свои аккумуляторы.
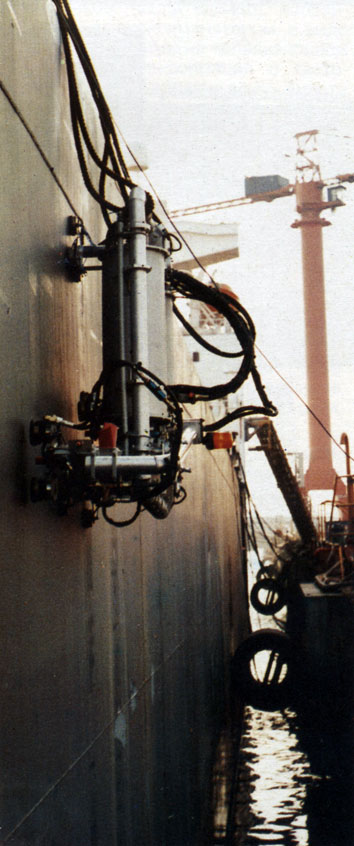
Шагающий робот Марин RM-2, оснащенный тремя ногами и рукой, построен французской фирмой 'Нормд шипъярдз'. Его назначение - передвигаясь по наружной поверхности корпуса корабля, очищать ее с помощью специальных инструментов из абразивных материалов
Роботы-манипуляторы в течение 20 лет занимали ведущее место в лабораторных исследованиях, связанных с искусственным интеллектом. Ученые пытались объединить "интеллектуальные" программы с алгоритмами интерпретации данных, поступающих с телекамер и микрофонов, а также с программами, которые управляют действиями манипуляторов и перемещением подвижных платформ. Аналогичных успехов в деле разработки движущихся роботов пока не наблюдается. И сегодня, когда системы машинного зрения для манипуляторов завоевывают право на существование, отыскивая и идентифицируя детали в процессе сборки, экспериментальный движущийся робот все еще затрачивает целый час, чтобы перебраться из одного конца комнаты в другой. Несмотря на скромные успехи в деле создания движущихся роботов - как игрушек, так и экспериментальных лабораторных моделей,- эти машины обладают удивительной притягательностью. По какой-то необъяснимой логике они кажутся более "живыми", чем стационарные устройства. Ведь всегда наибольший интерес вызывают рассказы о путешествиях и живые существа, способные передвигаться. И это вовсе не пустая прихоть человеческой психики, а отражение некоего фундаментального принципа. Окружающий нас мир отличается огромным разнообразием, и именно путешественник непрерывно попадает в новую обстановку, сталкиваясь с необходимостью по-новому реагировать на вызов, который бросает ему природа. Живые существа и "мертвые" механизмы не изолированы друг от друга - они представляют собой системы, связанные со своим окружением, и те из них, которые способны перемещаться, как правило, имеют дело с более разнообразными условиями, чем те, которые прикованы к одному месту. Тем не менее подвижность влечет за собой не только яркие впечатления, но и опасность. Неверный шаг или даже безуспешная попытка своевременного действия могут привести к гибели "путешественника", который всегда рискует значительно больше, чем "домосед".

Робот Одекс-1, построенный калифорнийской фирмой 'Одетикс',- по-видимому, наиболее совершенная из современных шагающих машин, управляемых не по проводам. На фотографии показано, как этот шестиногий 'функцио-ноид' приближается к автомобилю массой 1000 кг, который он должен приподнять
Посмотрев на мир живого, мы убедимся, что сочетание трудностей с открывающимися возможностями усиливает "эффект отбора", в результате которого виды живых существ, наделенные способностью перемещаться, развиваются в совершенно иных направлениях, чем неподвижные организмы. Жизнь на Земле можно рассматривать как грандиозный эксперимент по исследованию процесса отбора. Помимо удачного влияния такого отбора на наше собственное развитие, его следствия, известные на сегодняшний момент, позволяют сделать ряд основополагающих заключений. В частности, напрашивается вывод, что разум (интеллект) возник благодаря подвижности. Такой же отбор, по-видимому, определяет и эволюцию роботов, и, быть может, именно движущиеся роботы позволят лучше справиться с некоторыми неразрешенными проблемами создания искусственного интеллекта. К числу таких проблем относятся, в частности, вопрос о программировании цепочки логических рассуждений и процесс обучения на основе чувственного (сенсорного) опыта. За подобные возможности приходится платить - ведь правильно составить программы управления движущимися роботами гораздо труднее, чем большинство иных программ. Движущийся робот способен производить свободный поиск в окружающем его пестром мире, выявляя и пытаясь обойти именно те сочетания внешних условий, которые могли бы расстроить планы его создателей. Но здесь предстоит еще долгий путь.
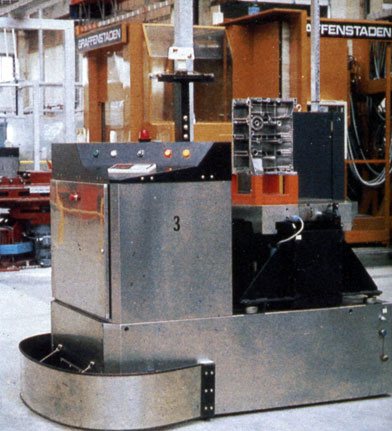
На гибком производственном предприятии компании 'Ситроен', в Медоне автомобильные компоненты развозят по цеху тележки, автоматически управляемые сигналами, которые передаются по кабелям, проложенным под полом
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'