Движущиеся роботы на производстве
Некоторые простейшие движущиеся роботы уже нашли применение на промышленных предприятиях, складах и в учреждениях. Эти системы выпускаются многими мелкими компаниями и отделениями крупных фирм. Так, операции загрузки-разгрузки на многих холодильных предприятиях для хранения пищевых продуктов, арктический холод которых отнюдь не благоприятен для человека, проводятся с помощью автоматических вилочных укладчиков. Все действия укладчиков координируются центральным компьютером, однако размещенные в них датчики весьма просты. Вилочные укладчики движутся направляемые пульсирующими магнитными полями, которые создаются системой проводников, уложенных под полом помещения; при разгрузке стеллажей "стыковка" укладчика с паллетами, заполненными продуктами, осуществляется с помощью инфракрасных (ИК) датчиков ближней локации. Но если укладчик вдруг сталкивается с препятствием или возникают другие аварийные ситуации, то обязательно требуется вмешательство человека.
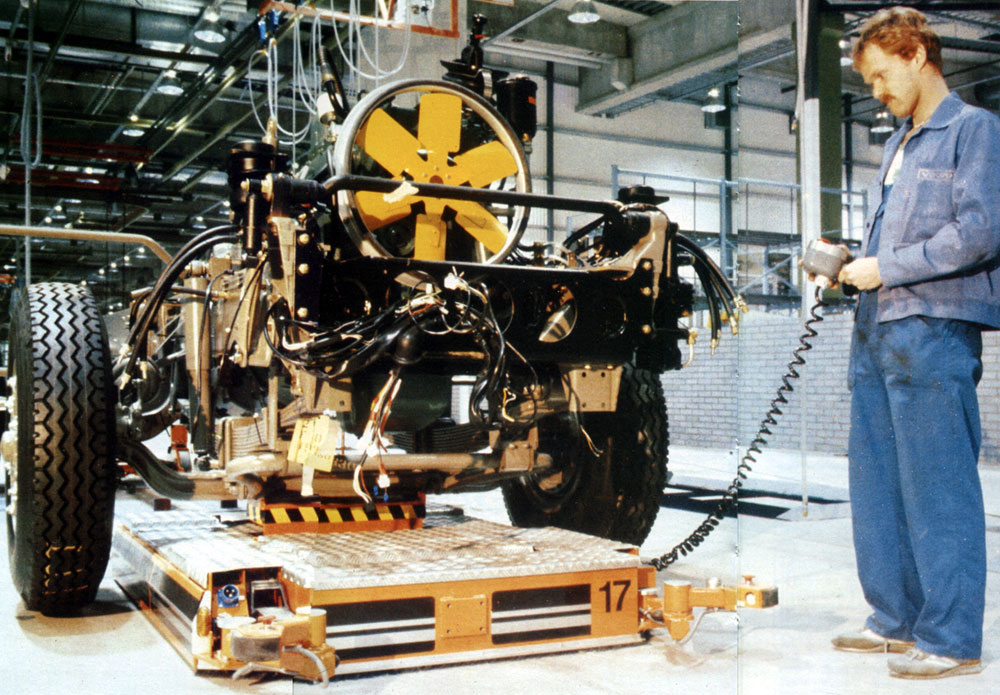
Управляемое по проводам автоматическое транспортное средство модели 109, изготовленное американским филиалом фирмы 'Вольво', входит в систему 'ОтоКэрриер'. Если аппарат по каким-либо причинам сходит с направляющего тракта, то ручное управление позволяет вернуть его на нужный путь
Движущиеся роботы, имеющие еще более простые конструкции, "патрулируют" коридоры некоторых учреждений и больниц. Эти автономные машины похожи на большие сервировочные столики. Они перемещаются по строго определенной дорожке, нанесенной прозрачной, но фосфоресцирующей жидкостью; ее ультрафиолетовое излучение воспринимают фотодатчики, установленные в нижней части робота. Такие роботы-тележки служат для перевозки почтовых отправлений в различные отделы учреждения или доставки постельного белья в больницах. Двигаясь, они издают тихий предупредительный сигнал и при столкновении с любым предметом сразу же останавливаются.
Некоторые японские фирмы уже имеют полностью автоматизированные заводы, которые способны довольно длительное время действовать без вмешательства человека. Современное состояние дел в этой области можно проиллюстрировать на примере завода американской компании "Дженерал моторе", который предполагалось ввести в строй в 1985 г. Этот автоматизированный, отличающийся высокой степенью гибкости обрабатывающий комплекс действует под управлением главного компьютера, рассчитанного на работу в течение 8-часовой смены без вмешательства человека. Там будут изготавливаться сложные передние мосты, которые используются в современных переднеприводных автомобилях и которые (в отличие от относительно простых мостов в прежних заднеприводных моделях) должны обеспечивать поворот колес, их перемещение вверх-вниз и, кроме того, приводить автомобиль в движение. Детали и узлы между 40 рабочими участками будут транспортировать примерно 50 движущихся роботов; они представляют собой самодвижущиеся тележки в виде прямоугольных металлических ящиков на колесах, которые перемещаются под действием сигналов, поступающих по кабелям, проложенным в бетонных полах. Те же роботы будут перевозить готовые изделия в места отгрузки продукции. Автоматизации подвергнется даже такая операция, как подметание пола. Предприятием будут управлять несколько компьютеров. Станки на этом заводе можно будет за считанные минуты переналаживать в расчете на обработку деталей другого размера, а центральный компьютер предприятия получит возможность изменять функции станка, если требуется срочно заменить какой-то другой станок, вышедший из строя; это позволяет избежать остановки производственного процесса. Компьютер будет также вести учет, управлять складскими запасами и заказывать сырье. Рабочие на таком автоматизированном заводе все же понадобятся - для технического обслуживания оборудования и выполнения операций, требующих более высокой квалификации.
Вместе с тем некоторые промышленные фирмы проявили интерес к нескольким более совершенным по замыслу (и в то же время более рискованным в отношении внедрения) конструкциям движущихся роботов и провели соответствующие эксперименты. Начиная с 50-х годов построено множество различных автоматизированных транспортных средств. Первые их образцы управлялись сигналами, которые поступали по электрокабелям, проложенным в полу; однако в последнее время созданы экспериментальные системы, движением которых управляют навигационные радиомаяки и радиолокатор. В эксперименте, проведенном недавно министерством шоссейных дорог Японии, был продемонстрирован автомобиль с компьютерным управлением. В нем использовалась стереоскопическая система из двух телекамер, установленных одна над другой на переднем бампере автомобиля. В сочетании с компьютером они обеспечивали автоматическое передвижение машины по шоссе, отслеживая бордюры, выступающие над поверхностью дорожного полотна, и обнаруживая препятствия, которые следовало объезжать. Одна японская фирма, производящая дорожно-строительные машины, продемонстрировала систему автоматического управления грузовым автомобилем, которую можно запрограммировать на движение по маршруту, "размеченному" сканирующими лазерными маяками. Однако следует признать, что ни одна из названных систем не может работать достаточно надежно в реальной обстановке, отличающейся от тщательно контролируемых лабораторных условий.
Примером перспективной идеи, способной принести реальные плоды в ближайшем будущем, может послужить проект создания робота-охранника. Американская компания "Деннинг мобайл роботикс" разрабатывает установку, которая будет передвигаться по коридорам тюрем, помещениям складов или большим подвалам, останавливаясь время от времени, чтобы с помощью датчиков перемещения (основанных на эффекте Доплера), тепловых ИК-детекторов, ИК-детекторов перемещения и других технических средств определять, нет ли каких-нибудь признаков человеческой деятельности. Робот будет иметь радиосвязь с базовой станцией, которая воспроизводит получаемую от робота информацию примерно так же, как стационарная система охранной сигнализации. Преимущества подвижной системы по сравнению со стационарным комплексом заключаются в том, что ввод ее в эксплуатацию обходится дешевле и, кроме того, подобную систему можно использовать для наблюдения за территориями, которые трудно контролировать с помощью фиксированных датчиков. Трудности связаны с оснащением робота навигационными устройствами, которые позволяли бы ему безошибочно двигаться в загроможденных помещениях. В его системе навигации используется множество дальномерных устройств типа сонаров (акустических эхолокаторов), по сигналам с которых компьютер системы составляет трехмерную карту "местности". Карта служит для прокладки маршрута в обход препятствий, а также для идентификации важнейших перекрестков, где необходимо выбрать правильное направление движения. Это позволяет роботу ориентироваться в помещениях, где он находится.
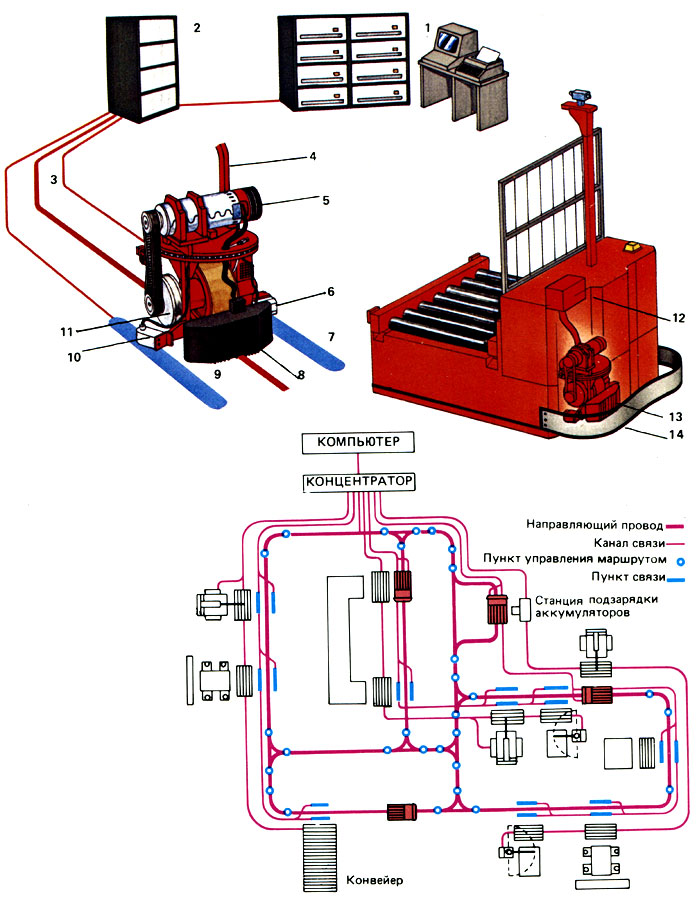
Система 'ОтоКэрриер' фирмы 'Вольво': 1 - компьютер; 2 - концентратор (для обмена информацией и командами между главной ЭВМ и транспортными средствами); 3 - провод направляющего тракта; 4 - к стойке электронной аппаратуры; 5 - электродвигатель; 6 - приемная антенна; 7 - передающая антенна; 8 - антенна системы наведения; 9 - приемная антенна; 10 - передающая антенна; 11 - встроенный тормоз двигателя; 12 - управляющий электронный блок; 13 - узел электропривода и двигателя антенны системы наведения; 14 - бампер, смягчающий столкновения. Система 'ОтоКэрриер' была создана в начале 70-х годов шведской компанией 'Вольво' с целью повышения эффективности работы ее предприятий по сборке автомобилей. Система представляет собой комплекс автоматизированных транспортных средств (ATPC), управляемых сигналами, которые поступают по кабелям, проложенным в колодцах под полами цехов вдоль заранее определенных маршрутов перемещения АТРС Такие подвижные аппараты транспортируют детали в пределах предприятия; достигнув нужных рабочих участков (обслуживаемых или не обслуживаемых людьми), они останавливаются и производят необходимые сборочные операции. АТРС могут также применяться в качестве загрузочно-разгрузочных и транспортировочных средств на товарных складах и предприятиях оптовой торговли. В состав системы 'ОтоКэрриер' входят следующие средства: центральный компьютер, который следит за работой системы и управляет ею; концентраторы, обеспечивающие обмен информацией между 24 пунктами связи и рабочими местами общим числом до 64; сеть направляющих кабелей; пункты связи, расположенные в важнейших точках вдоль направляющего тракта и на рабочих участках, обменивающихся информацией с АТРС; обслуживающие конвейеры, которые позволяют производить загрузку деталей и заготовок с АТРС на станки и обратно; станции, где под управлением ЭВМ производится подзарядка аккумуляторов АТРС
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'