Лабораторные эксперименты
До середины 60-х годов компьютеров производилось слишком мало и стоили они так дорого, что вряд ли кому-нибудь могла прийти в голову мысль применять их в таких "легкомысленных" устройствах, как роботы. Тем не менее в исследовательских лабораториях было построено несколько интересных подвижных машин на основе специализированных схем, позволивших продемонстрировать разнообразные технические решения. Английский психолог У. Грей Уолтер, начав свои работы примерно в 1950 г., создал несколько электронных черепах, которые были оснащены схемами на сверхминиатюрных электронных лампах и по своему поведению напоминали животных. Первый вариант такого устройства был снабжен вращающимися фотоэлементами, позволявшими черепахе обнаруживать источники света и направляться в их сторону (один из источников находился в специальном отсеке подзарядки батарей). Черепаха, кроме того, реагировала на удары по панцирю, имитируя реакцию бегства. Группы подобных машин демонстрировали довольно сложное социальное поведение, отвечая на подаваемые друг другу управляющие световые сигналы и тактильные воздействия. После черепах Уолтер создал более совершенную машину, которая также реагировала на свет (двигаясь в сторону его источника), касание (стараясь уползти) или громкий шум (замирая на несколько секунд). Самое удивительное, что такую машину можно было научить ассоциативно связывать одно воздействие с другим. Так, если на нее многократно воздействовали громким шумом, за которым всякий раз следовал удар по панцирю, то она обращалась в "бегство" при одном лишь шуме. Ассоциативный механизм был реализован в этом подвижном устройстве с помощью перезаряжаемого конденсатора.
Упомянутый выше робот Бист, построенный в Университете Джонса Гопкинса в начале 60-х годов, побудил и другие университеты сконструировать подобные имитирующие модели. В некоторых из них вместо фотоэлементов использовались специализированные схемы, подключаемые к телекамерам и управляемые системами цифровых логических вентилей на транзисторах, которые в то время были еще в новинку. Набор основных движений некоторых машин был дополнен новым действием - "встряхиванием для высвобождения руки".
Первая серьезная попытка объединить компьютер с роботом связана с использованием систем типа "глаз- рука". В каждую такую систему входила телекамера, соединенная с ЭВМ и служащая для наблюдения за рабочим столом, на котором оперировал механический манипулятор. Самые ранние из подобных систем (они были созданы примерно в 1965 г.) появились в то время, когда малочисленные исследователи, занимавшиеся искусственным интеллектом (ИИ), были еще полны энтузиазма, порожденного успехом первых программ ИИ. Эти программы практически с первой же попытки наилучшим образом проявляли себя в различных играх, доказывали математические теоремы и решали узкоспециальные задачи почти как люди. Возникло мнение, что робототехнические системы представляют собой более многообещающую среду для применения подобных "мыслящих" программ. Здесь, однако, появились новые проблемы.
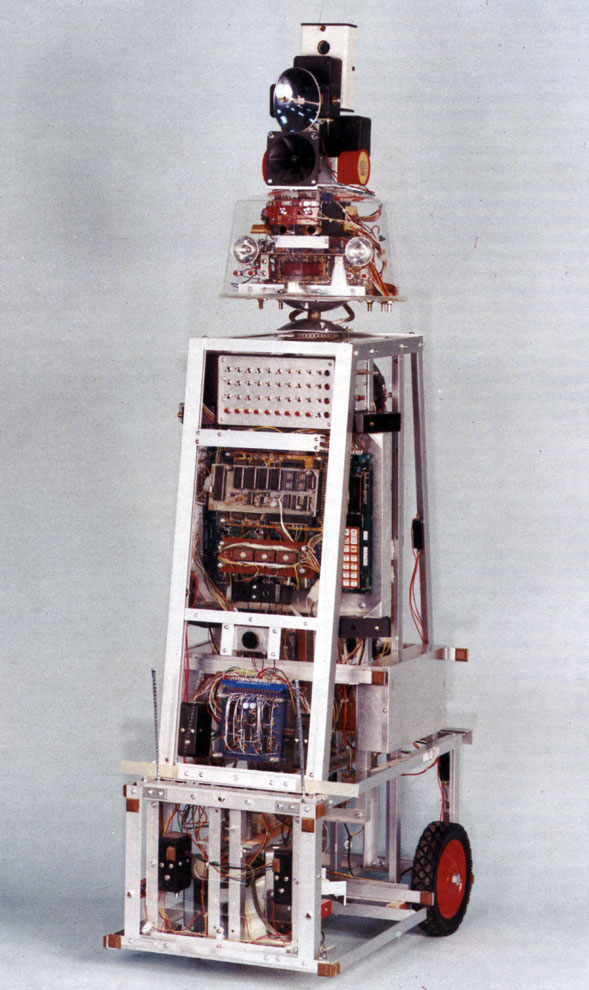
Движущаяся система РОБАРТI, созданная Бартом Эвереттом из ВМС США, была задумана как экспериментальное средство для проверки возможностей автономного робота-часового. Ныне эта система используется в качестве исследовательского транспортного аппарата в Центре надводного оружия ВМС США
Прежде всего изображение, поступающее от телекамеры, может быть представлено в компьютере как прямоугольный массив чисел, каждое из которых задает определенную градацию серого или цвет той или иной точки изображения (см. главу "Робот и его окружение"). Для высококачественного воспроизведения картины требуется не менее миллиона таких чисел. Выделение информации о людях, деревьях, зверях, отвертках и чашках в этом никак не классифицированном множестве чисел - задача неимоверной сложности, и в первых программах ИИ даже не предпринималось попыток ее решения. Цель подобных программ сводилась к манипуляциям ярко окрашенными блоками в форме прямоугольных параллелепипедов, расположенными на темной поверхности стола. Решаемые ими задачи можно считать лишь карикатурой на естественный процесс, в ходе которого младенец учится координировать движение своих рук и глаз. В такой упрощенной среде более мощным компьютерам, чем те, которые прежде решали шахматные этюды, а также геометрические и счетные задачи, в сочетании с более обширными и совершенными программами иногда удавалось при известной доле везения правильно определять местоположение одного из блоков и "вылавливать" его.
Работы над обобщенными системами типа "глаз-рука" свелись практически только к экспериментам по изучению отдельных частей проблемы (например, динамики действия обратной связи по усилию) или к созданию систем промышленного назначения. Большинство манипуляторов оснащено специальными схватами, особыми датчиками, а также средствами машинного зрения и управления, рассчитанными на узкоспециализированные применения. Экономически это целесообразно, поскольку стационарный манипулятор, скажем на сборочной линии, в ходе своего многократно повторяющегося рабочего цикла функционирует практически в неизменных условиях. Способы, позволяющие с максимальной эффективностью действовать в идентичных условиях, находят более широкое применение, чем дорогостоящие в реализации универсальные методы, которые рассчитаны на самые разнообразные (но редко встречающиеся) ситуации и отличаются меньшей эффективностью в обычной обстановке.
Вскоре после того, как стало возможным подключение телекамер и манипуляторов к компьютерам, начались эксперименты с движущимися роботами, управляемыми ЭВМ. Практические трудности, связанные с конструированием и эксплуатацией подвижного устройства с дистанционным управлением, оснащенного передатчиком видеосигналов, телекамерой и батареей питания, усугубили и без того серьезные проблемы создания систем "глаз-рука" и вынудили многих исследователей выйти из игры.
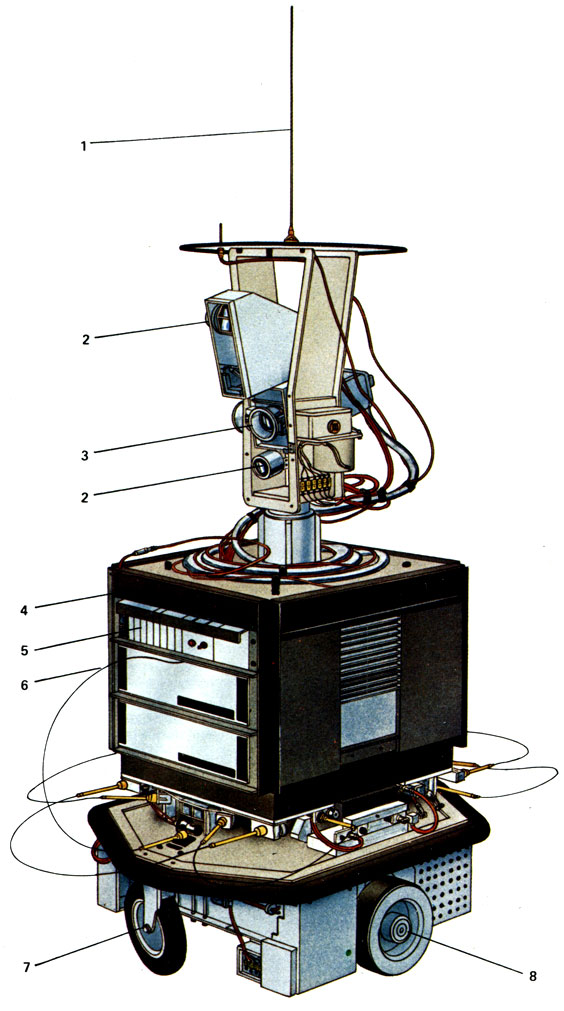
Робот Шейки: 1 - антенна радиоканала; 2 - дальномер; 3 - телекамера; 4 - бортовое логическое устройство; 5 - блок управления телекамерой; б - датчики, предупреждающие столкновение; 7 - направляющее колесо; 8 - приводное колесо. Робот Шейки, разработанный в Станфордском научно-исследовательском институте в 1969 г., был одним из первых движущихся роботов, управляемых компьютерами. Хотя робот и представлял собой машину, способную перемещаться, в основном он служил исследовательским инструментом в зарождавшейся тогда области искусственного интеллекта. Он мог действовать в помещениях, где находилось лишь несколько недеформируемых предметов простейшей формы. Шейки управлялся оригинальной программой под названием STRIPS (Stanford Research Institute Problem Solver - стан-фордский 'решатель задач'). Хотя робот действовал крайне медленно, он оправдал свое звание 'мыслящей машины', продемонстрировав умение самостоятельно вырабатывать алгоритмы для выполнения простейших операций типа 'перемещение блока'
Первым успехом на этом пути было создание робота Шейки (вибрирующий) в Станфордском научно-исследовательском институте приблизительно в 1970 г. Хотя временами Шейки вел себя как самый настоящий робот, главное его значение заключалось в воплощении мысленного эксперимента. Его создатели, относившиеся к первому поколению исследователей в области искусственного интеллекта, прежде всего стремились построить машины, "способные логически мыслить". Их интересы были сосредоточены главным образом на применении логических методов решения задач к проблемам реального мира. Управление и зрение рассматривались как функции системы, и эти работы в основном были поручены инженерам и студентам-старшекурсникам. Шейки крайне редко передвигался самостоятельно, и его зрительная система, рассчитанная на восприятие "блочного мира", состоявшего только из голых стен и нескольких крупных призматических предметов с гладкой поверхностью, была запрограммирована неэффективно и действовала крайне медленно: более часа уходило на то, чтобы в простейшей обстановке обнаружить блок или наклонную плоскость. Самым впечатляющим действием Шейки, которое он мог выполнять только поэтапно, было "сталкивание блока"; он проделывал это, если обнаруживал блок, установленный на возвышении. Такая процедура выполнялась за несколько последовательных шагов. Сначала робот находил клиновидный предмет, который мог служить наклонной плоскостью, затем пододвигал его к возвышению с блоком, взбирался по наклонной плоскости на возвышение и сталкивал с него блок.
Проблемы управления движущимся роботом даже в столь примитивных условиях потребовали высокоэффективной компьютерной программы STRIPS; она разрабатывала планы решения задач, стоящих перед роботом, и даже сегодня не имеет себе равных по сложности. Планы, подготавливаемые программой STRIPS, строились на основе описаний простейших действий робота (примитивов), каждое из которых выполнялось только при соблюдении предварительных условий, а его завершение приводило к определенным последствиям. В программе предусматривалась возможность выхода из неожиданных ситуаций, вызванных резким отклонением от курса, путем пошагового пересмотра текущего плана. Неожиданность - одна из основных особенностей мира движения и один из стимулов эволюции, приведшей к развитию интеллекта у существ, способных двигаться.
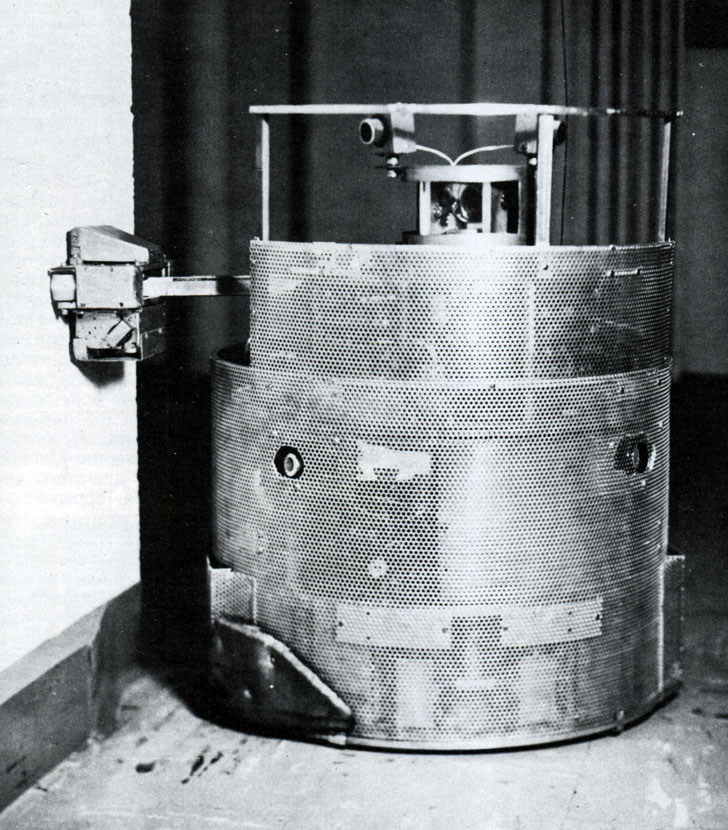
Робот Бист, созданный в Университете Джонса Гопкинса, отыскав настенную розетку, включился в электросеть, чтобы подзарядить свои аккумуляторы. Обнаружив розетку 'глазом'-фотоэлементом (вверху), Бист 'нащупывает' ее с помощью системы управления
Для движущихся роботов требуется создание искусственного интеллекта, в корне отличного от того, какой нужен стационарным манипуляторам. Зрительные системы, основанные на распознавании простейших форм, малопригодны для машин, "разгуливающих" по заполненному различными предметами трехмерному миру. Никакими механизмами управления невозможно обеспечить точное задание положения аппарата, который должен перемещаться по голой земле, и абсолютно бесполезны специальные захватные приспособления, если необходимо манипулировать предметами самых разнообразных непредсказуемых форм. Таким образом, движущемуся роботу, который в своих путешествиях зачастую попадает в неожиданные ситуации, системы управления на основе линейных алгоритмов вряд ли пригодятся.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'