Станфордская тележка
Станфордская тележка была построена специалистами Станфордского университета (не путать со Станфордским научно-исследовательским институтом) примерно в то же время, что и робот Шейки, но при значительно меньших финансовых затратах. Тележка представляла собой движущийся робот, и с самого начала осуществления этого проекта основное внимание уделялось методам восприятия и управления, отличающимся ограниченной эффективностью, а не планированию перемещений. Тележка использовалась как экспериментальная установка, которая при испытаниях в естественных условиях позволила выяснить возможности движущихся роботов и наметить ориентиры для дальнейших исследований. До 1980 г., когда окончились эксперименты (точнее, когда был списан большой универсальный компьютер, управлявший тележкой), были составлены программы, в соответствии с которыми робот выполнял следующие действия:
- С помощью телекамеры, установленной примерно на уровне "глаз", без остановки следовал по белой маршрутной линии. Программа должна была находить белую линию на "местности", заполненной множеством предметов, преобразовывая в цифровой код лишь отдельные, избранные части обрабатываемых изображений.
- Перемещался по отрезкам прямолинейных маршрутов, используя в качестве ориентиров для своего "компаса" определенные точки горизонта (кроме телевизионной камеры, тележка не имела иных контрольно-измерительных приборов). Программа обеспечивала передвижение тележки шагами длиной 1-10 м. За каждым шагом следовала пауза в 15 с, в течение которых программа "обдумывала" полученные изображения и планировала следующее перемещение.
- Двигался к указанной точке в пределах примерно 20 м от исходного положения (перемещение задавалось так: пройти столько-то метров вперед и столько-то влево), обходя многочисленные хаотически расположенные предметы произвольной формы, для чего роботу приходилось многократно изменять курс. "Навигация" осуществлялась по сигналам от телекамеры, изображения на которой служили для управления движением и обнаружения препятствий в трех измерениях (чтобы исключить столкновения). Следуя программе, робот передвигался метровыми шагами, "обдумывая" в течение примерно 15 мин очередное перемещение. Чтобы пересечь большую комнату или добраться до загрузочного бокса, роботу требовалось 5 ч, т. е. как раз такое время, на которое хватало заряда его аккумуляторных батарей.
Система машинного зрения, представление внешнего мира и методы планирования, которые в конечном счете оправдали себя при управлении станфордской тележкой, полностью отличались от соответствующих методов, используемых в "блочном мире", а также от специализированных "зрительных средств" промышленного назначения, связанных с системами типа "глаз-рука". Система машинного зрения, созданная применительно к блочному миру, была абсолютно непригодна для отображения тех искусственных ситуаций, с которыми сталкивалась станфордская тележка как в закрытых помещениях, так и вне их. Множество экспериментов, проведенных с тележкой, привели к отказу от ряда других подходов, которые считались перспективными, однако оказались недостаточно надежными, когда на их основе стали обрабатывать значительные по объему и разнообразные по содержанию данные, поступающие от робота. В результате таких экспериментов была разработана система машинного зрения, коренным образом отличавшаяся от большинства других подобных средств. Она относилась к системам "низкого уровня", поскольку не предусматривала моделирование объекта, однако путем использования избыточных и - в определенных случаях дублирующих друг друга - функциональных средств она вполне достоверно строила трехмерное отображение окружающего мира, основываясь на искаженных шумами неопределенных данных. Достоверность была необходима, поскольку любой типичный маршрут тележки состоял из 20 отдельных перемещений, каждое длиной 1 м, причем за очередным перемещением следовала пауза на обработку изображения. Чтобы путешествие было удачным, каждый шаг должен был производиться с высокой точностью. Эксперименты с роботами типа станфордской тележки продолжаются в Университете Карнеги-Меллона; здесь пока используются четыре различные робота, оптимизированные применительно к отдельным этапам проекта.
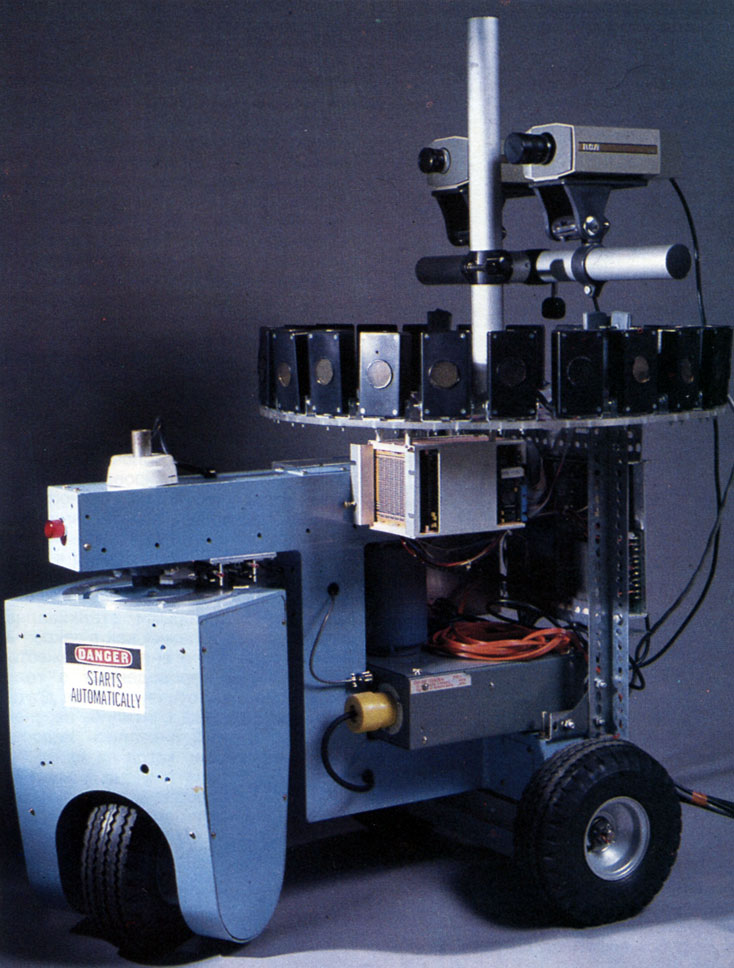
Одной из примечательных особенностей движущегося робота Нептун является система из 24 широкоугольных эхо-локационных дальномеров, которые образуют кольцевую структуру, расположенную непосредственно под двумя телекамерами. Кабель от Нептуна идет к компьютеру VAX 11/780 фирмы 'Диджитал экуипмент'
Первый из этих четырех роботов, Плутон, спроектирован как наиболее универсальное устройство. Его колесная система сконструирована так, что позволяет роботу перемещаться в любую сторону и одновременно вращаться вокруг своей оси подобно фигуристу. Предполагалось использовать Плутон для продолжения исследований по машинному зрению в рамках работ над станфордской тележкой, а также в качестве средства для решения задач ориентации с "участием" навигации манипуляторов (с целью создания системы полностью визуального наведения, которая позволит роботу находить дверь, открывать ее и продвигаться через дверной проем). Однако встреча с реальным миром изменила все эти планы. Задача управления тремя подвесками независимо поворачивающихся колес с отдельными приводами, которыми оснащен Плутон, может служить примером пока еще неразрешенной проблемы управления системами с чрезмерными ограничениями. Исследователи бьются над решением этой задачи, а Плутон между тем остается практически недвижимым.
Когда трудности с Плутоном стали очевидными, был построен простой робот-Нептун, который использовался для исследований по дистанционным системам машинного зрения. Этот робот, питающийся и управляемый по кабелю (от большой ЭВМ), имеет вид трехколесного велосипеда; он воспринимает окружающий мир посредством двух телекамер и в настоящее время способен пересечь комнату менее чем за час, т. е. в пять раз быстрее, чем станфордская тележка. Нептун применялся также для изучения возможности навигации по карте помещения, которая составлялась на основе данных, получаемых от 24 расположенных кольцом широкоугольных эхолокаторов. Эхолокационный метод уступает по точности машинному зрению, однако требует в 10 раз меньшего объема вычислений.
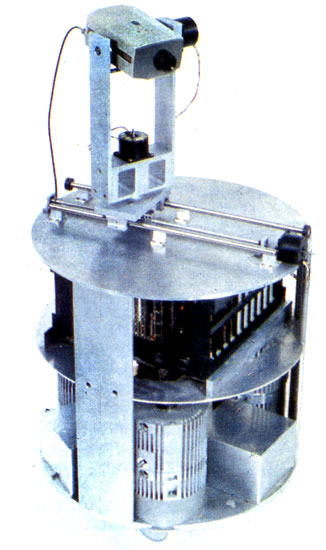
Робот Плутон (из семейства движущихся роботов, созданных в Университете Карнеги-Меллона) предназначен для проведения широкого диапозона исследований в области средств восприятия и управления. Осуществление этого проекта сейчас приостановлено в связи с трудностями в разработке системы управления роботом
Третий робот из семейства, созданного в Университете Карнеги-Меллона, был назван Ураном. Он рассчитан на решение задач, оказавшихся непосильными для Плутона. Всенаправленность движений Урана обеспечивается колесами любопытной конструкции. Вместо шин эти колеса снабжены роликами, размещенными по окружности колеса через 450. Если колеса робота монтируются так же, как четыре колеса вагона, то ролики вращаются, как обычно, вперед или назад. Однако когда колеса, находящиеся с разных сторон робота, приводятся во вращение в противоположных направлениях, ролики разворачиваются соответствкющим образом.
Четвертый робот того же семейства назван Террегейтором (землепроходец) и предназначен для передвижения вне помещений на значительные расстояния. Он гораздо больше всех остальных роботов семейства (по размерам почти не уступает небольшому автомобилю), и источником энергии для него служат не батареии, а двигатель внутреннего сгорания. Чотя Террегейтор и способен совершать двигательные путешествия вне помещений, до сих пор он перемещался лишь на короткие расстояния вдоль дорог, визуально отслеживая бордюры, чтобы не сбиваться с курса. Со временем он должен научиться распознавать препятствия на пути и избегать столкновения с ними, а также различать ориентиры на местности. Предварительные исследования показали, что робот может двигаться с приемлемой скоростью (несколько километров в час), если им будет управлять компьютер, быстродействие которого примерно в 100 раз больше, чем у универсальных ЭВМ среднего класса, используемых в нынешних экспериментах с Террегейтером. Достичь столь высокого быстродействия можно, дополнив указанные стандартные компьютеры специализированной машиной - так называемым матричным процессором.
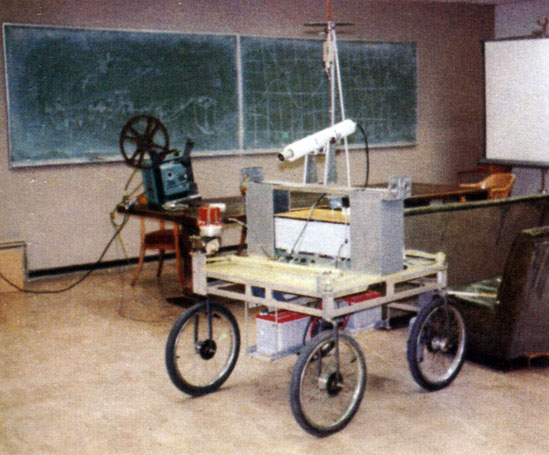
Станфордская тележка 'познает' окружающий мир через изображения, которые поступают на нее от бортовой телевизионной системы. Для выбора каждого безостановочного перемещения на 1 м по пути, свободному от препятствий, тележке требуется 15 мин
В 70-е годы в Лаборатории реактивного движения при Калифорнийском технологическом институте проводились эксперименты с движущимся роботом RRV (Robotic Research Vehicle - роботизированное исследовательское транспортное средство), управляемым по проводам. Робот RRV был оснащен лазерным дальномером, стереоскопической системой из двух телекамер и манипулятором. Специалисты лаборатории намеревались разработать систему, которая позволяла бы роботу, высаженному на Марс, проходить умеренные расстояния без управления с Земли. (Не следует забывать, что при управлении с Земли возникнет задержка примерно в 30 мин - время прохождения сигнала с Марса на Землю и обратно.) В рамках описываемого проекта были созданы программы, которые позволяли роботу обнаруживать камни на своем пути и обходить или поднимать их, отбрасывая в сторону. Исследования приостановились в 1978 г., когда было прекращено финансирование работ по подготовке полета на Марс, который должен был последовать за посадками на эту планету космических аппаратов "Викинг".

По замыслу сотрудников Лаборатории реактивного движения, примерно так должен выглядеть разумный 'марсоход'. Прокладывать маршрут этот робот будет с помощью стереоскопической системы из двух телекамер, лазерных дальномеров и датчиков ближней локации
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'