Шагающие машины
Примерно 70% земной поверхности недоступны для транспортных средств, созданных руками человека, хотя во многие недоступные места можно добраться верхом на лошади. Проблема здесь заключается в характере точки опоры. Колесо - блестящее изобретение, однако оно лишь наполовину решает проблему передвижения, ибо для его эффективного использования нужна гладкая опорная поверхность. Сравнив колеса с ногами, нетрудно заметить, что при движении колеса не контролируется происходящее в точках соприкосновения его с поверхностью: нагрузка просто прикладывается к следующим один за другим участкам дороги. Шагающее же существо в состоянии само выбирать точки контакта ноги с поверхностью и учитывать ее неровности. При наличии гладкой твердой дорожной поверхности колесо, безусловно, служит основой наиболее эффективных средств передвижения. Когда же дело касается естественной земной поверхности, которая, как правило, изобилует неровностями, колесо во многих случаях оказывается абсолютно бесполезным и здесь побеждают ноги.

Террегейтор - самый крупный движущийся робот, созданный в Университете Карнеги-Меллона. В отличие от других роботов с электроприводом основным источником энергии для Террегейтора служит двигатель внутреннего сгорания
В настоящее время создано множество игрушек, которые на первый взгляд кажутся шагающими, но на самом деле переставляют ноги чисто механически, не используя потенциальных возможностей регулируемого взаимодействия с опорной поверхностью. Чтобы шагать по-настоящему, нужно располагать подробными сведениями о ближайшем окружении. Машины, способные шагать именно в таком смысле этого слова, появились после того, как для проведения множества необходимых измерений и процедур принятия соответствующих решений стали широко использоваться компьютеры.
В отличие от подвижных аппаратов на колесах шагающие машины могут 'осознанно' изменять походку, сообразуясь с особенностями местности. Этот четырехногий аппарат создан профессорами Токийского технологического института Уметани и Хиросэ
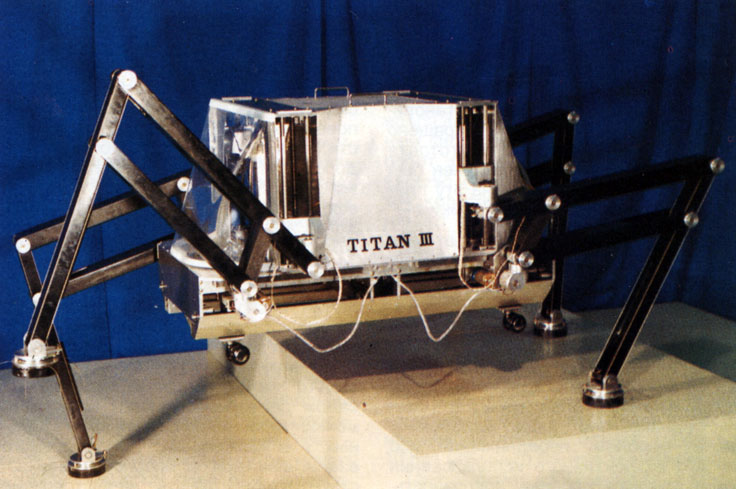
Одной из первых шагающих машин был четырехногий транспортер, или шагающий грузовик, который исследовательская группа фирмы "Дженерал электрик" продемонстрировала еще в 1968 г. Внешне похожий на алюминиевого слона, он приводился в действие двигателем внутреннего сгорания, который запускал гидравлический компрессор. Роботом управлял человек с помощью встроенного механизма, который, усиливая движение рук и ног водителя, вызывал перемещение четырех ног аппарата. Управлять роботом было непросто, однако порой ему удавалось продемонстрировать весьма впечатляющие трюки: он строил помост, на который затем сам же взбирался, перемещал грузовую тележку и мог обойти яйцо, не раздавив его. Этот проект стимулировал проведение дальнейших работ по созданию шагающих машин с более высоким уровнем автоматизации.
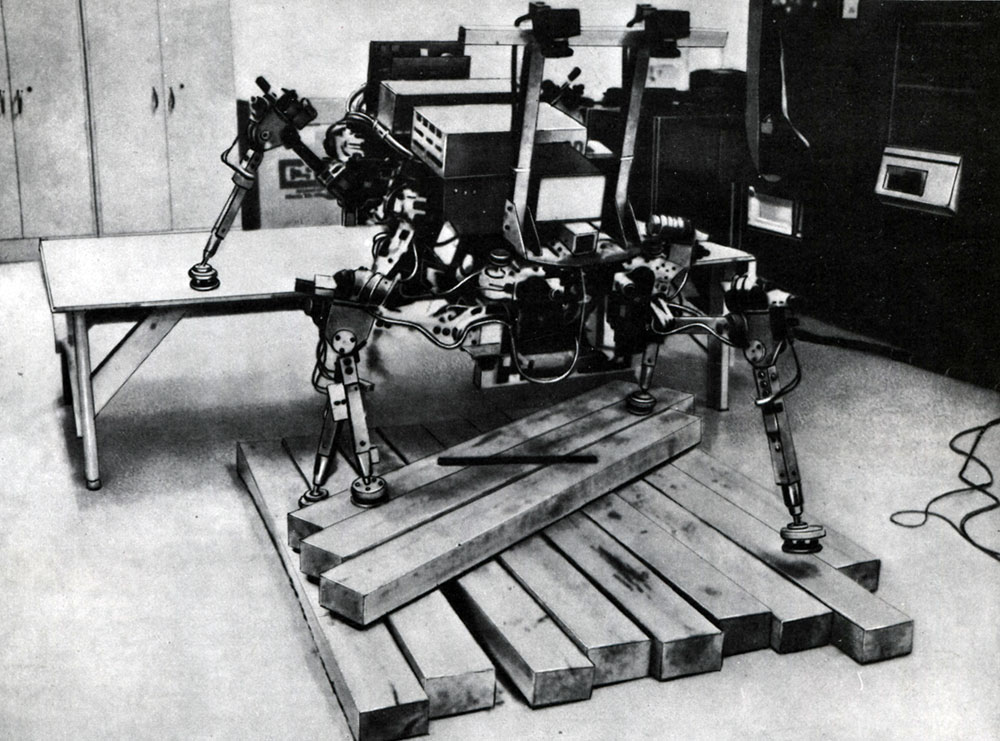
Робот Гексапод (шестиног), разработанный Р. Макги из университета шт. Огайо, проходит испытания в лаборатории. В США нынешние исследования в области усовершенствованных автоматизированных транспортных средств финансируются управлением DARPA министерства обороны
В середине 70-х годов группа исследователей из Московского университета* продемонстрировала программы управления шестиногими шагающими роботами, позволяющие выбирать точки опоры для ног исходя из составляемой по ходу движения карты местности. Эти работы привели к изготовлению миниатюрных действующих моделей, управляемых по проводам. Несколько небольших шагающих роботов построили японцы. Одна из наиболее удачных машин такого типа была создана в Токийском технологическом институте. Она напоминала четырехно-гого паука размером с хлебницу. Каждая его нога представляет собой пантографический механизм с приводом от трех двигателей, установленных в теле паука, причем электропитание и сигналы управления поступают по кабелю. Паук передвигается довольно медленно, воспринимая информацию об окружающей среде только через контактные переключатели, установленные на ступнях ног. Он способен взбираться по лестнице, перешагивать препятствия и неровности поверхности. И наоборот, когда на его пути встречается углубление, он опускает ногу, пока ступня не коснется земли.
* (Речь идет о советских исследованиях систем управления шагающими роботами (см. Девянин Е. А., Гурфинкель В. С, Ленский А. В. и др. Макет шестиногого шагающего аппарата с супервизорным управлением. В кк.: Исследования робототехнических систем, ред. Д. Е. Охоцимский.- М.: Наука, 1982. - Прим. ред.)
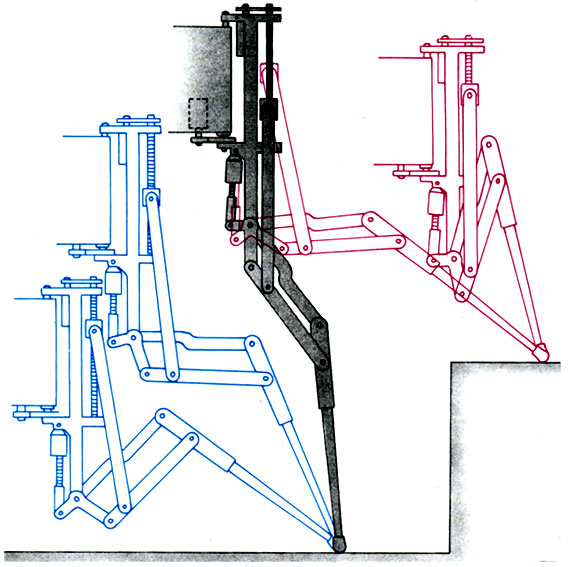
Как шагает Одекс-1: 1- двигатель перемещения по вертикали; 2 - двигатель поворота ноги; 3 - двигатель выноса ноги. Робот Одекс-1 оснащен 18 бортовыми электродвигателями - по три на каждую ногу. Самый большой из этой тройки электродвигателей вызывает перемещение ноги по вертикали, тогда как два других двигателя управляют выносом ноги и ее поворотом - последний обеспечивает изменение направления движения. На приведенных диаграммах показаны последовательное изменение поз робота и степень удлинения ног, обеспечиваемые данной системой управления. Робот может ходить по лестнице и, кроме того, способен изменять свой профиль, приспосабливаясь к меняющимся окружающим условиям. При полностью вытянутых ногах в стоячем положении Одекс-1 достигает в высоту 2 м; сидя 'на корточках', робот имеет высоту всего 91 см. Хотя в последнем случае расстояние между его ногами составляет 1,8 м, Одекс-1 все же сохраняет способность передвигаться. 'Сжавшись', робот не превышает 1,2 м в высоту и 69 см в ширину
Наиболее продолжительные исследования по шагающим машинам, начавшиеся в конце 60-х годов, проводятся в университете шт. Огайо. Группа исследователей этого университета изучала принципы управления движущимися четырехногими устройствами, однако главной целью исследований были шестиногие шагающие машины. Главное внимание уделялось таким вопросам, как планирование движения, координация прикладываемых усилий, статическая и динамическая устойчивость, выбор точек опоры, а также целому ряду сопутствующих проблем. Эксперименты проводились главным образом с шестиногим шагающим электромеханическим аппаратом Гексапод (шестиног), управляемым по проводам. Он был размером с письменный стол, но вдвое меньше по высоте. Названная группа проводит работу по контракту, заключенному с Управлением перспективных исследований и разработок министерства обороны США (DARPA); этот крупный контракт предусматривает создание значительно большей по размерам машины подобного типа- аппарата ASV (Adaptive Suspension Vehicle - экипаж с адаптивной подвеской). Эта машина должна передвигаться по пересеченной открытой местности, везя одного пассажира. Каждая из ее шести ног снабжена гидроприводом; источником энергии служит бортовой двигатель внутреннего сгорания. Специалисты DARPA надеются объединить транспортное средство, созданное в рамках этого проекта, с системой, которая разрабатывается в ходе исследований по визуальной навигации и планированию маршрутов, финансируемых тем же управлением. Целью этих работ является создание движущегося аппарата, способного самостоятельно перемещаться по неровной местности, опасной для передвижения. Более подробно об указанном проекте рассказывается в следующей главе.
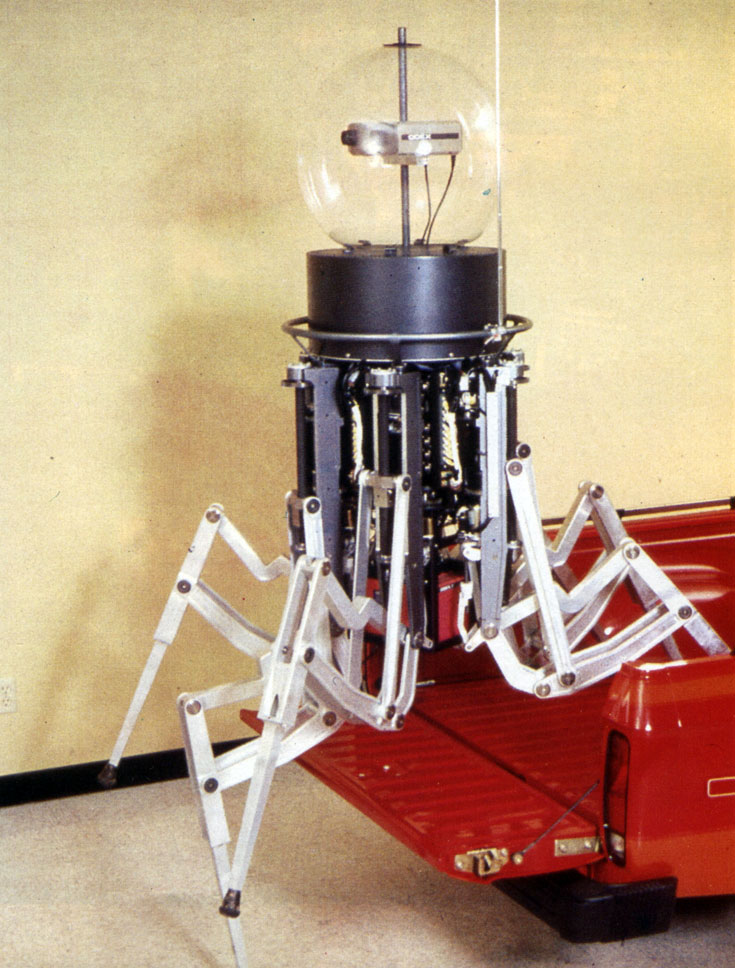
Робот Одекс-1 создан с целью демонстрации технических возможностей универсальных мобильных 'функционоидов' будущего поколения. Он отличается исключительной маневренностью, а максимальная длина его шага составляет около 1 м независимо от того, движется он на подъем или под уклон
DARPA финансирует также проект (научный руководитель Марк Рэйберт), разрабатываемый Университетом Карнеги-Меллона, в рамках которого исследуется проблема динамической устойчивости, или баланса. Экспериментальными моделями здесь служат два прыгающих робота. Каждый из них имеет по одной ноге, приводимой в движение сжатым воздухом и небольшими гидроприводами. Пока работы ограничиваются изучением проблем, связанных с перемещением прыжками и сохранением равновесия на гладкой поверхности. Оснащение подобных аппаратов машинным зрением позволит создать многоногие роботы, которые будут уже не ковылять, а мчаться галопом или передвигаться скачками.

Кевин Доулинг из Университета Карнеги - Меллона направляет робот Нептун (на переднем плане) на препятствие. Этот робот способен обходить неподвижные предметы, но не может разминуться с двигающимися объектами, например с псом
Пожалуй, наиболее близка к внедрению в повседневную практику шагающая машина, построенная калифорнийской фирмой "Одетикс", которая завоевала известность своими магнитофонами для космических кораблей. Высота робота Одекс-1 составляет примерно 2 м, но может меняться в зависимости от конфигурации его похожих на паучьи шести ног. Каждой ногой управляют три электродвигателя; два из них служат приводами винтов, регулирующих вынос ноги в сторону и ее длину, а третий обеспечивает ее движение вперед и назад. Управление движением производится всего несколькими основными командами, которые передаются по радиоканалу от устройства дистанционного управления. Следуя таким командам, программы бортовых компьютеров этой удивительной машины заставляют ее спускаться с тележки и шагать по комнате. Для робота Одекс-1 выбрана "походка трешками": при поступательном движении он одновременно переносит три ноги, а остальные три в это время остаются на опоре. Робот достаточно силен, чтобы поднимать и тащить за собой тележку, на которой стоял прежде, а также достаточно ловок, чтобы подобрать и установить опору размером с коробку для шляп, а затем взобраться на нее. Специалисты фирмы "Одетикс" надеются со временем построить автономную шагающую машину, пригодную для решения широкого круга задач. Но об этом подробнее рассказывается в следующей главе.
Все о хладоносителях на сайте химпром
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'