Японские системы
В отличие от автономных подводных роботов телеуправляемые подводные аппараты, используемые для работ в океане, получили широкое распространение во всем мире. Например, специалисты из Японского центра научно-технических исследований моря (ЯЦНТИМ), расположенного в Йокосуке, а также из ряда японским фирм совместно работают над созданием подводных аппаратов, связь которых с поверхностью должна осуществляться по кабелю, а их перемещение под водой производится с помощью толкателей. Первый опытный образец подобного аппарата, TV-1, был испытан в начале 80-х годов. Он может плыть на глубине 200 м со скоростью около 4 км/ч, весит 43 кг и по своим размерам немного превосходит большой телевизор. Аппарат оснащен двумя телекамерами, глубиномером, магнитным компасом и фотокамерой. Информация об обстановке вокруг аппарата передается на поверхность по кабелю. С помощью этого аппарата были обследованы районы рыбных промыслов около берегов Японии, а также осуществлен осмотр подводного трубопровода неподалеку от острова Науру. Аппарат TV-2 (коммерческий вариант TV-1) был изготовлен в 1982 г. фирмой Q.I. совместно с исследователями из ЯЦНТИМ. Аппараты этой серии использовались для осмотра подводных телефонных кабелей, а также для работ в Антарктике, где с их помощью изучались морские организмы, живущие на больших глубинах подо льдом.

Специалисты университета шт. Огайо создали эту модель шестиногого транспортного средства ASV-84 по контракту с министерством обороны США
Кроме того, в ЯЦНТИМ был создан подводный аппарат "Москито" (комар), который может опускаться на глубину до 100 м. В настоящее время этот исследовательский центр работает над созданием еще двух аппаратов: "Хорнет" - более крупный и глубоководный вариант аппарата TV-1, способный функционировать на глубине до 500 м, и "Долфин-3К", который предназначается для погружений на глубину 3300 м. В двух последних аппаратах для приема команд и передачи информации на поверхность используется волоконно-оптический кабель. Последний имеет более широкую полосу пропускания (т. е. большую информационную пропускную способность), чем обычные медные провода, используемые в технике связи. Одновременно специалисты указанного центра принимают участие в долгосрочной исследовательской программе по созданию полностью автономного подводного аппарата.

Фирма 'Мартин Мариетта' заключила с DARPA контракт (на пять лет), предусматривающий разработку автономного наземного транспортного средства, которое позволит выявить возможности военных систем, использующих принципы ИИ
Американская фирма "Хайдро про-дактс" (Сан-Диего) поставила такую же цель. Эта фирма выпускает целый ряд устройств для подводных работ, представляющих собой обычные телеуправляемые аппараты, но она работает и над созданием аппаратов, способных действовать самостоятельно. К числу устройств фирмы "Хайдро продактс", предназначенных для контроля и наблюдения за подводными объектами, относится небольшой аппарат RCV-225, по форме близкий к шару - за что он получил прозвище "быстрое глазное яблоко",- который передает телевизионные изображения на станцию управления. Он широко применяется для обследования или наблюдения под водой. Более совершенный аппарат RCV-150 оснащен манипуляторами, которые по команде находящегося на поверхности оператора могут перерезать кабели или отремонтировать неисправное оборудование.
Дистанционно управляемый аппарат RUM III, разрабатываемый в Калифорнийском университете, предназначен для изучения морского дна в глубоководных акваториях
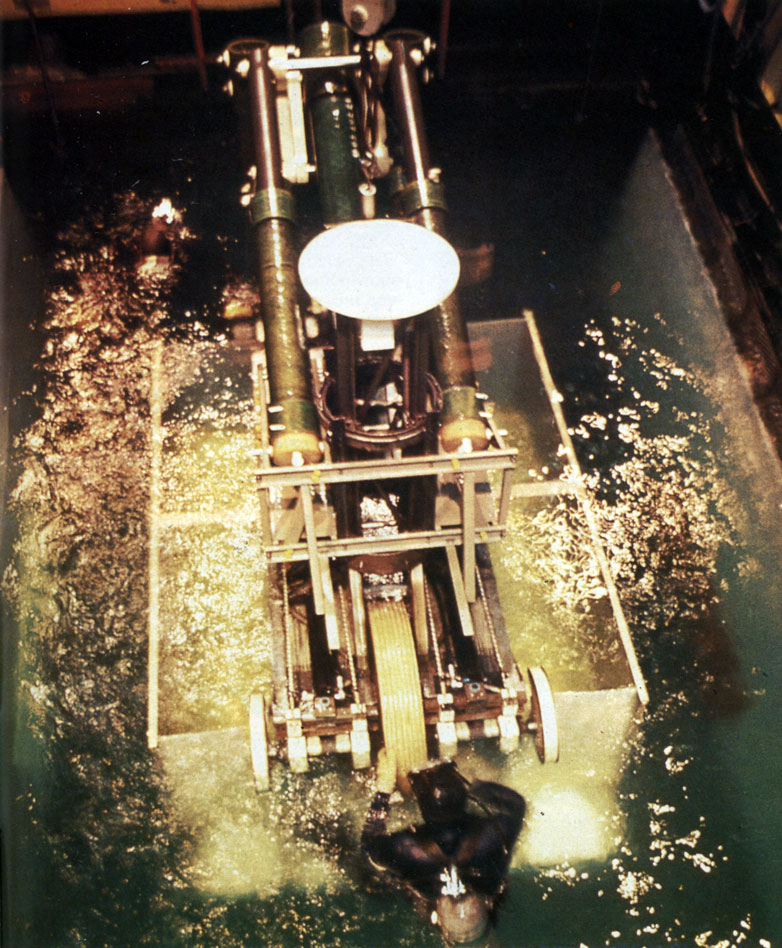
Еще один тип телеуправляемых устройств, работающих под водой,- дистанционно управляемые траншеекопатели, автоматически закладывающие подводные трубопроводы на глубинах до 500 м. Это оборудование широко использовалось при освоении нефтяных и газовых месторождений в Северном море. Одна такая автоматическая траншеекопательная система была спроектирована и изготовлена норвежской фирмой "Квернер Бруг" в конце 70-х годов. К этой фирме присоединились две другие компании, "Браун энд Рут" в США и "Волкер Стевин" в Нидерландах, создав новую компанию KBV; перед ней была поставлена задача дальнейшего совершенствования подобного оборудования. Траншеекопательная система норвежской фирмы использовалась в 1983 г. для закладки трубопровода длиной 4 км в районе месторождения Брент в Северном море. Рытье траншеи осуществлялось с помощью механической фрезы с отсосом, в то время как другой механизм машины захватывал отрезок трубы и автоматически укладывал его в свежевырытую траншею.
Инженер на заводе фирмы 'Дженерал дайнемикс' (Форт-Уэрт) наблюдает за работой оборудования, регулирующего рарход энергии. Предполагается, что это оборудование даст ежегодную экономию в 1,4 млн. долл
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'