Роботы на атомных электростанциях
Телеуправляемые манипуляторы в течение ряда лет используются в атомной промышленности для выполнения работ в местах с высоким уровнем радиоактивности, например для технического обслуживания топливных стержней. Фирма "Тейлор хайтек" (Чорли, графство Ланкашир) разработала несколько систем, предназначенных для использования на английских атомных электростанциях. Недавно эта фирма сконструировала механическую руку шарнирного типа - звеньевую систему (см. схематическое изображение ее принципа действия), которая проходит через отверстие в корпус реактора. Оказавшись в центре реактора, рука раскрывается подобно сочлененному телескопическому устройству. После этого она может действовать по заранее составленным программам, например приваривать металлические заплаты или производить осмотр частей реактора с помощью телекамер.
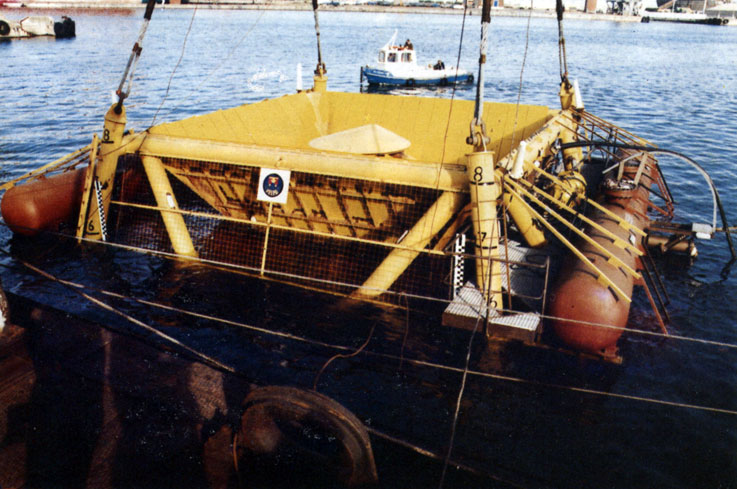
Испытания морского робота RM3 фирмы 'Нормд шипъярдз', представляющего собой трехногий аппарат-амфибию, который карабкается по корпусу судна, очищая его от наростов из ракушек
Во всем мире существует лишь несколько предприятий атомной энергетики, где используются телеуправляемые устройства. Комиссия по атомной энергии США разработала два таких необычных устройства, "Спайдер" и "Роман", которые эксплуатируются на заводе "Селлафилд" по регенерации ядерного топлива (прежнее название "Уиндскейл") в Камбрии. Комиссия по атомной энергии Франции также разработала подобные аппараты. Калифорнийский научно-исследовательский институт электроэнергии, финансируtмый американскими электротехническими компаниями, изучает возможность использования шагающих роботов для проверки атомных электростанций путем выполнения таких регламентных работ, как техническое обслуживание или осмотр. При проведении восстановительных работ на аварийной атомной электростанции "Тримайл-Айленд" (шт. Пенсильвания) исследовалась возможность использования колесных телеуправляемых систем для выполнения работ в зонах реактора с высоким уровнем радиации. Лаборатория гражданских и строительных роботов Университета Карнеги-Меллона разработала под руководством Уильяма Уитэкера дистанционный разведывательный аппарат, специально предназначенный для выполнения различных работ на станции "Тримайл-Айленд". Специалисты, принимающие участие в реализации гигантского исследовательского проекта - создания объединенного европейского ускорителя в Оксфордшире (Великобритания), который станет базой для проведения экспериментов по получению термоядерной энергии, планируют применить подобные подвижные устройства для инспектирования ускорителя после его полного ввода в эксплуатацию (предположительно в конце 80-х годов).
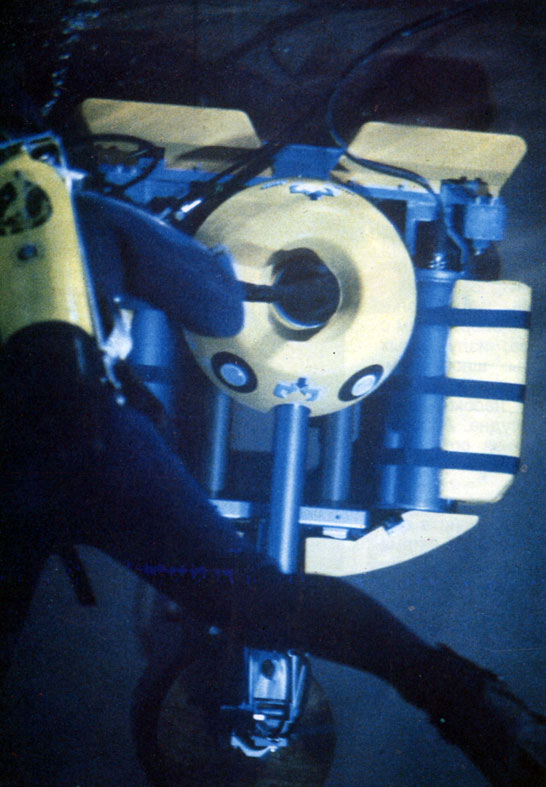
Еще один аппарат фирмы 'Нормд шипъярдз' ВЕЛПО. Обертывая изоляционным материалом трубопроводы, проложенные на океанском дне, он обеспечивает их защиту от повреждений. 120-тонный опытный образец такого аппарата с гидроприводом может функционировать на глубине до 300 м
В горнодобывающей промышленности специалисты работают над несколькими проектами проходческих машин, способных самостоятельно выдерживать заданное направление проходки. В этих системах используются датчики гироскопического типа, что позволяет осуществлять выемку горной породы в нужном направлении. Над одним из британских проектов совместно работают инженеры Национального управления угольной промышленности и фирмы "Доско". Результатом их деятельности явилось создание оснащенного датчиками оборудования для штолен, которое при проходке на небольшие расстояния придерживается заданного направления без помощи оператора. Проф. Мередит Тринг, бывший сотрудник Лондонского колледжа королевы Марии, предложил проект дистанционно управляемых устройств, предназначенных для добычи угля. Однако пока это предложение не нашло поддержки.
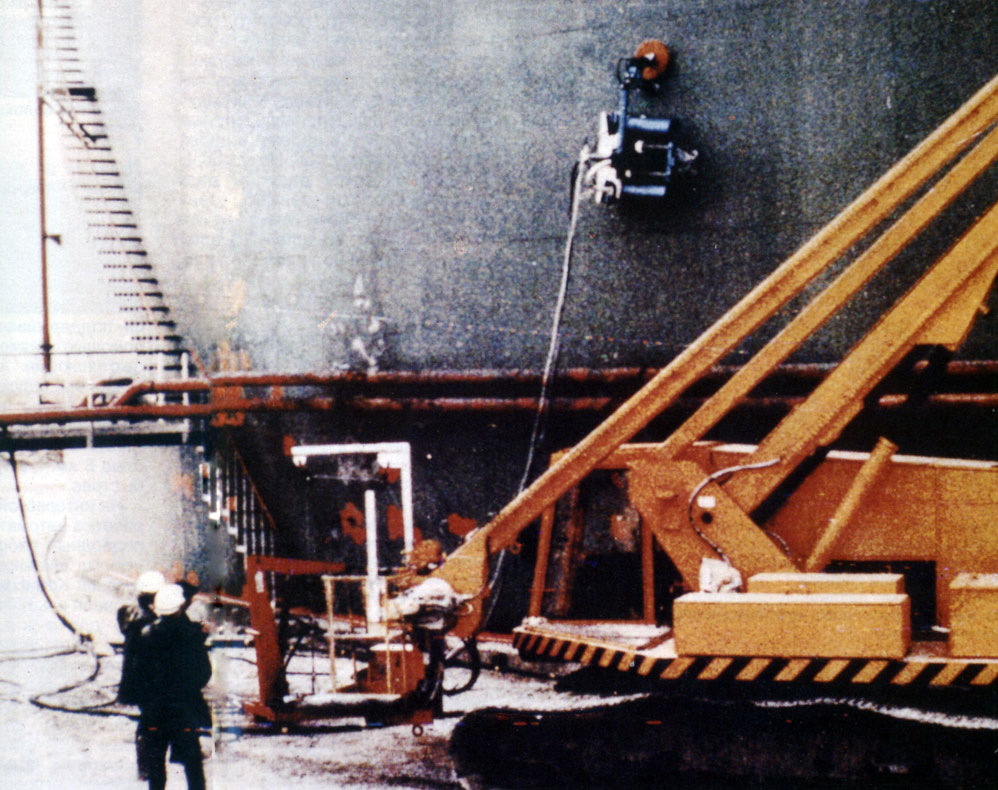
Аппарат RGH1, наземный вариант робота RM3, можно использовать для очистки наружных стенок топливных резервуаров. Робот соединен с дистанционным устройством управления волоконно-оптическим кабелем
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'