Поводыри слепых
По всей видимости, новейшим примером использования "непромышленных" роботов можно считать осуществляемую в Японии разработку движущегося робота в помощь слепым. Колесный робот Мелдог разрабатывается в Лаборатории механики (Цукуба, Япония) начиная с 1977 г. Этот аппарат движется непосредственно впереди слепого. Посылая ультразвуковые импульсы, робот обнаруживает и опознает препятствия на своем пути, а компьютер, установленный в роботе, сравнивает полученную информацию с (цифровой) картой данного района. Таким образом робот получает представление о том, что происходит в ближайшем окружении. Он способен, например, заметить движущийся автомобиль или другое транспортное средство вблизи перекрестка, который намерен перейти слепой. Кроме того, робот оснащен оптическим датчиком для сбора информации о встречающихся на его пути ориентирах, которая передается для анализа в компьютер.
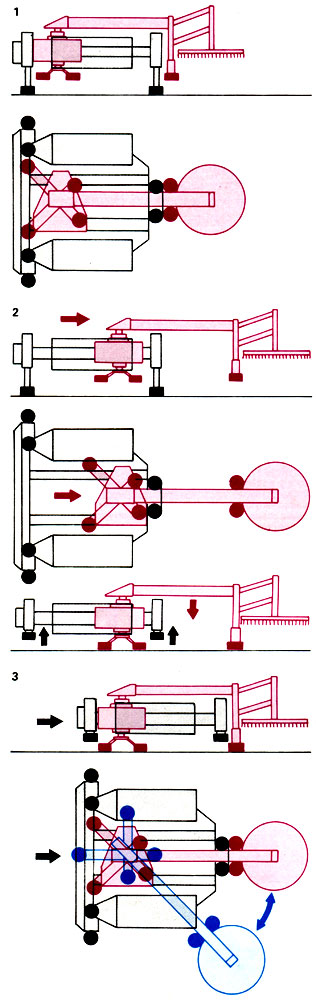
Движущийся робот RM3. Морской робот RM3, по существу, состоит из двух функциональных узлов: основной трехногой конструкции (черный цвет) и подвижного механизма (красный цвет), на котором закреплен манипулятор. В обоих узлах для сцепления с поверхностью используются магниты и вакуумные присосы, которые попеременно движутся поступательно и подтягиваются друг за другом, заставляя робот двигаться. В начальной фазе шага подвижный механизм приподнимается, а все три ноги основной конструкции находятся в выдвинутом состоянии (1). Затем подвижный механизм перемещается вперед (2) на 40 см (длина шага). Далее ноги основной конструкции убираются, и робот опирается на подвижный механизм. Затем последний 'оттягивается', перемещая основную конструкцию вперед (3). Наконец, ноги опускаются - шаг сделан. После этого весь процесс повторяется. Для изменения направления движения подвижный механизм можно повернуть на угол до 90° относительно оси (голубой цвет). Ноги убираются, подвижный механизм принимает на себя всю тяжесть аппарата и переводит основную конструкцию в положение, соответствующее новому направлению движения, после чего робот может сделать следующий шаг. Робот перемещается со скоростью 150 м/ч, за сутки очищая от грязи до 5000 м2. Кроме того, робот RM3 можно использовать для оптической и рентгеновской дефектоскопии, а также для шлифовки поверхностей
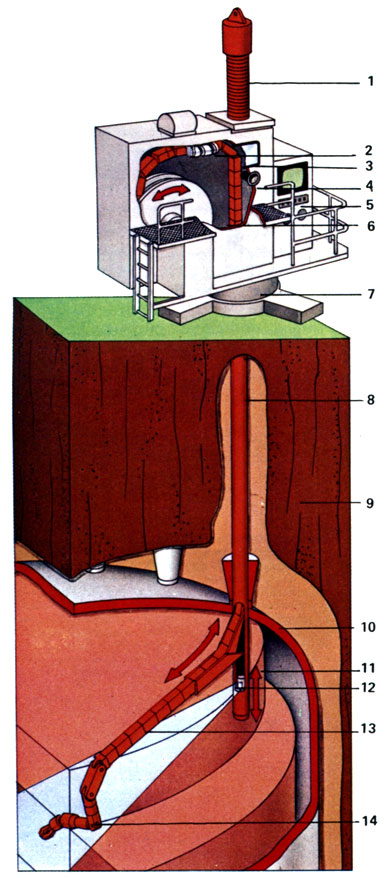
Манипулятор 'звеньевой системы' фирмы 'Тейлор хайтек': 1 - сильфон контейнера для смены инструмента; 2 - спиральный привод звеньев; 3 - смотровое окно; 4 - перчаточная обойма для смены инструмента; 5 - пульт управления; 6 - барабан для намотки гибких звеньев; 7 - поворотный круг; 8 - вертикальный коллекторе - бетонный бункер; 10 - газопоглощающий купол; 11 - направляющий отмёт; 12 - камера наведения манипулятора; 13 - звенья; 14 - силовой манипулятор. Проект манипуляционной системы, которая может использоваться для ввода дефектоскопов или ремонтных инструментов внутрь усовершенствованного реактора с газовым охлаждением, разработан фирмой 'Тейлор хайтек' совместно с Центральным электроэнергетическим управлением Великобритании. Основной элемент манипулятора - полушарнирная цепь, называемая 'звеньевой системой'. Гибкие звенья 'наматываются' в одном направлении на барабан и при разматывании образуют цепь, служащую рабочим органом, на котором закреплены инструменты или камеры. В показанной на рисунке системе манипулятор может опускаться на глубину 15 м с загрузочной поверхности реактора и до 6 м от уровня входа в реактор. Полезная нагрузка при полностью вытянутом манипуляторе составляет 30 кг, а точность позиционирования равна ±1 мм. Устройством управляет оператор, который наблюдает за его положением и действиями на экране видеомонитора, изображения на который поступают от камеры наведения, закрепленной у основания опоры
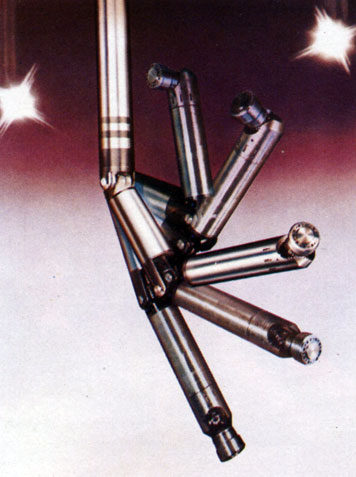
Усовершенствованный манипулятор, созданный по заказу Центрального электроэнергетического управления Великобритании фирмой 'Тейлор хайтек', выполняет различные операции внутри ядерных реакторов, например дистанционную сварку
Мелдог взаимодействует со своим владельцем через электрический соединительный кабель, посылаемые роботом электрические импульсы поступают на электроды, с которыми контактируют пальцы человека. Импульсы посылаются в соответствии со специальным кодом, который владелец робота должен выучить, чтобы правильно пользоваться своим помощником. Так, этим кодом можно дать указание слепому сделать шаг влево или вправо, чтобы избежать столкновения с каким-то предметом, оказавшимся на пути следования. Японским инженерам еще предстоит доказать, что робот Мелдог представляет собой нечто большее, нежели просто дорогую игрушку, и что он принесет реальную пользу слепым. Им также придется убедить людей, что эта система проще в пользовании, чем такое испытанное и надежное средство, как собака-поводырь. Но если эксперименты с Мелдогом дадут положительные результаты, это станет свидетельством того, что роботы уверенно выходят за пределы промышленных предприятий и завоевывают признание не только на производстве.
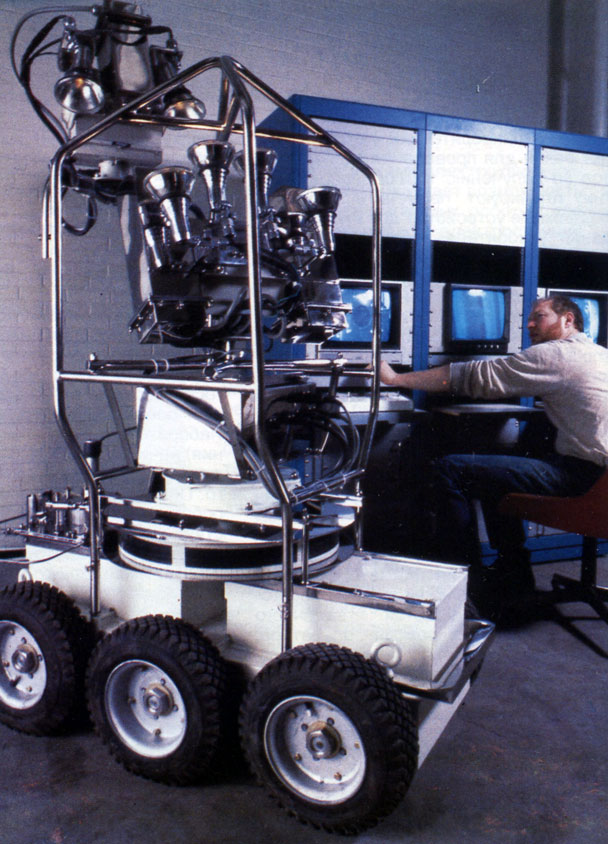
Дистанционный разведочный аппарат, разработанный в Университете Карнеги-Меллона, предназначен для работы в зараженных помещениях атомной электростанции 'Тримайл Айленд'

Робот Мелдог Мк IV ведет слепую женщину; свое местоположение он определяет по 'топографической карте', заложенной в его память; для обнаружения и обхода препятствий используются ультразвуковые датчики

Пульт оператора системы 'Спай-дер', созданной специалистами Комиссии по атомной энергии Великобритании; на нем размещены два видеомонитора, контроллер манипулятора (справа), ручка управления и индикаторы положения (вверху в центре)
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'