"Викинги" на Марсе
Первыми усовершенствованными роботами в космосе были два американских спускаемых аппарата "Викинг", прибывшие на Марс в 1976 г. По сравнению с простыми пантографическими механизмами КА типа "Сервейер" их манипуляторы были значительно усовершенствованы. Каждый спускаемый аппарат имел единственный манипулятор с одной степенью свободы -вращательной. Он вытягивался из цоколя на расстояние до 240 см, забирал грунт и засыпал его в четыре полости, расположенные в верхней части КА; отсюда образцы грунта поступали в автоматизированные аналитические "лаборатории" и камеры, где выращивались биологические культуры. Манипуляторы состояли из двух металлических полос, каждая из которых слегка искривлялась в продольном направлении, в результате чего поперечное сечение конструкции имело овальную форму. Полоса в неразвернутом состоянии наматывалась на барабан, так что при вытягивании поперечная кривизна каждой полосы и одинаковые по величине, но противоположно ориентированные продольные искривления двух полос обеспечивали жесткость механического звена. Ковш на конце манипулятора также мог вибрировать, благодаря чему мелкие частицы грунта проводили через сито, а более крупные камешки задерживались в нем и не засоряли бортовые мини-лаборатории, где проводился анализ образцов. Каждый манипулятор безотказно проработал более двух лет, на протяжении которых поддерживалась связь со спускаемыми аппаратами.
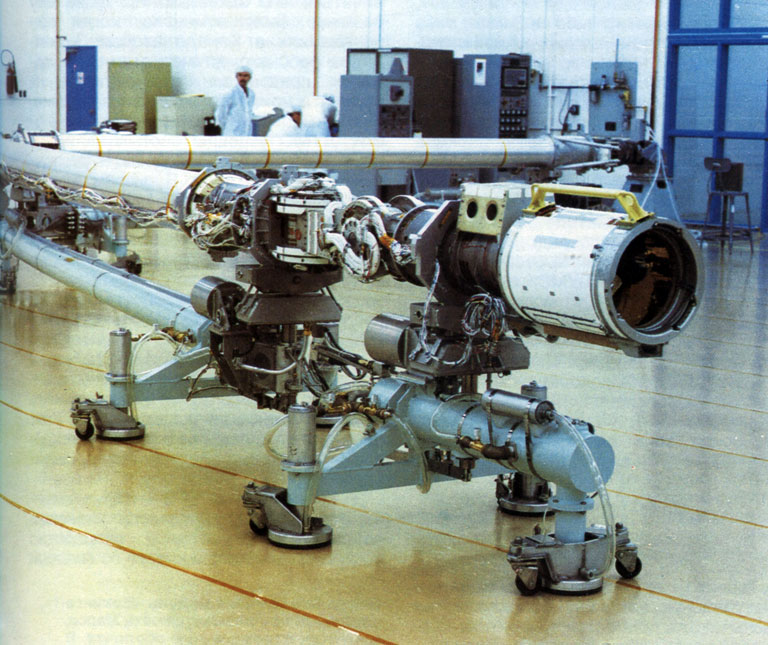
Дистанциооно управляемая манипуляционная система канадской фирмы 'СПАР аэроспейс', установленная на борту МТКК №Спейс шаттл', используется для выполнения таких операций, как снятие спутников с орбиты
Ныне самым совершенным космическим роботом справедливо считается дистанционно управляемая манипуля-ционная система (ДУМС) транспортного космического корабля многоразового использования (МТКК) типа "Спейс шаттл". Уже на первом этапе осуществления программы "Шаттл" стало ясно, что в грузовом отсеке МТКК придется транспортировать на орбиту (и обратно на Землю) большие грузы и что ни один из имеющихся механизмов не в состоянии обеспечить высокую точность (±2,54 см) перемещения, которая необходима при загрузке спутника, предназначенного для вывода в космос, в удерживающее устройство. Кроме того, не вызывало сомнений, что появятся новые спутники, для развертывания которых потребуются иные средства, нежели просто механизмы освобождения пружин, применявшиеся ранее для вывода на орбиту спутников и сопряженных с ними двигателей последней ступени.
Разработку руки робота-манипулятора (ДУМС) взяла на себя Канада, которая также принимала участие в программе "Шаттл"; США в свою очередь обязались не финансировать создание конкурирующих моделей подобных систем и покупать по одной ДУМС для каждого корабля серии "Шаттл" после поставки первой модели.
Программой по разработке ДУМС руководил Национальный научно-исследовательский совет Канады, а генеральным подрядчиком была выбрана фирма "СПАР аэроспейс". Последняя никогда не занималась созданием изделий для космических аппаратов, но имела богатый опыт в области авиационных двигателей и передаточных механизмов, а именно системы подобного типа могли понадобиться для постройки нужного робота. Программа по созданию ДУМС фактически лишь на треть была американской: фирма "СПАР аэроспейс" разработала сам манипулятор и пульт управления, корпорация "Рокуэлл интернэшнл" (генеральный подрядчик по программе "Шаттл") - позиционирующий механизм и удерживающие схваты ДУМС, а фирма IBM - программное обеспечение управления манипулятором. Все это вместе получило название "Система развертывания и съема полезного груза с орбиты" (СРСПГ), хотя известны и другие названия: робот-манипулятор, ДУМС или Канадарм (последнее наименование было дано системе вскоре после первого использования манипулятора в составе космической транспортной системы STS-2 в ноябре 1981 г.).
Технические условия на ДУМС содержали следующие требования. Система должна обеспечивать развертывание и съем с орбиты полного полезного груза "Шаттла" (29 485 кг), размещаемого в отсеке размером 4,6x18 м. Эксплуатационные характеристики, в частности, предусматривали, что радиус действия манипулятора должен составлять 15,2 м. Кроме того, робот должен обладать способностью захватывать груз, движущийся относительно "Шаттла" со скоростью 0,03 м/с; освобождать груз в требуемой точке системы координат, привязанной к МТКК, с погрешностью не более ±5°, сообщая ему при этом угловую скорость не выше 0,015° в секунду; останавливать груз массой 14 515 кг, перемещающийся со скоростью 0,06 м/с, на отрезке длиной 0,6 м; двигаться без груза со скоростью 0,6 м/с; подводить рабочий орган в нужную точку с линейной погрешностью ±5,1 см и угловой ±1° от заданного положения; швартовать груз к другому КА; развертывать и снимать с орбиты по меньшей мере пять различных грузов за каждый рейс. Робот-манипулятор предполагалось оснастить телекамерами в помощь экипажу; общая его масса не должна превышать 454 кг, а работать он должен под управлением универсальной ЭВМ корабля "Спейс шаттл".
Предполагалось, что данная конструкция в целом будет представлять собою манипулятор с шестью суставами и рабочим органом силкового типа, которые имеют такие размеры: длина плеча 6,37 м, считая от плечевого сустава до центра локтя; длина предплечья 7,6 м от центра локтевого сустава до центра запястья, а длина кисти 1,88 м от запястья до кромки рабочего органа. Плечо и предплечье манипулятора выполнены из карбоэпо-ксидных труб диаметром 33 см; армированная угольным волокнистым материалом эпоксидная смола была выбрана потому, что она обладает минимально возможной удельной массой при максимальной прочности.
Плечо может подниматься и опускаться на 147° (на 2° внутрь грузового отсека и 145° над ним) и описывать полную окружность относительно вертикальной оси. Локоть может поворачиваться на 162° (разгибается на 2°, запирается и сгибается на 160°). Запястье имеет три сустава, что обеспечивает максимальную гибкость при приближении к объекту: приведение- отведение и сгибание осуществляются в пределах 240°, а вращение в пределах - 447° (больше полной окружности). В каждом суставе применены бесщеточные электродвигатели постоянного тока и зубчатые понижающие передачи с высоким коэффициентом передачи.
Рабочий орган приводится в действие тремя тросами, которые одним концом прикреплены к его "стакану", а другим- к поворотной манжете. Когда "стакан" вращается, тросы смыкаются подобно лепесткам ирисовой диафрагмы фотокамеры и ухватываются за любой небольшой выступ на объекте. Затем рабочий орган убирает манжету, создавая тянущее усилие на "носик" рабочего органа "стакана" и тем самым прочно захватывая объект. Такая конструкция обеспечивает значительную степень взаимного смещения ДУМС и объекта, снимаемого с орбиты. На одной стороне рабочего органа закреплена телекамера, позволяющая оператору видеть снимаемый объект, а на другой находится электрический разъем, предназначенный, например, для питания электроинструмента (разъем можно использовать и для других целей). На конце верхней секции манипулятора, как раз над локтевым суставом, установлена еще одна телекамера.
Приспособление для захвата на обслуживаемом аппарате состоит из двух частей. Во-первых, имеется круглая базовая плита со стальным выступом (захватным штырем) длиной 27,4 см, заканчивающимся небольшой шляпкой. Вокруг выступа смонтированы три конусные направляющие, которые заходят в три углубления на носике рабочего органа. Над приспособлением для захвата расположена мишень (отметка цели) - черная пленка с белой поперечной полосой. Из мишени выступает небольшой (10 см) стержень с белым кончиком. Когда оператор смотрит на изображение, полученное от телекамеры рабочего органа, он видит взаимное положение белой точки и расположенной за нею белой полосы и таким образом может судить о смещении рабочего органа относительно обслуживаемого аппарата.
Системой ДУМС управляет астронавт с пульта, расположенного на левом кормовом посту в кабине корабля "Спейс шаттл". Пост оснащен двумя ручными органами управления манипулятора (один для управления поступательным, а второй- вращательным движением манипулятора), а также двумя телекамерами и двумя иллюминаторами на корме кабины, позволяющими видеть, что происходит в грузовом отсеке. Кроме того, имеются переключатели для непосредственного управления каждым электродвигателем и тормозом ДУМС, лампы предупредительной сигнализации и индикаторы положений каждого сустава робота-манипулятора.
Предусмотрены пять режимов управления манипулятором: автоматический (компьютер выполняет программу, заложенную в него либо на Земле, либо уже в космосе экипажем), ручной с "наставником" (оператор "пилотирует" рабочий орган, а компьютер формирует соответствующие команды, подаваемые на звенья манипулятора), ручной по каждому отдельному звену (каждое звено управляется своим ключом), прямой и резервный прямой (оператор посылает команды, формируемые с помощью переключателей, по кабелям, соединенным непосредственно со звеньями - минуя компьютер).
Зона действия ДУМС охватывает 90% пространства грузового отсека. Из зоны обслуживания исключены: небольшая (19 см) буферная зона, прилегающая к внутренней поверхности грузового отсека, которая учтена в программном обеспечении; последние 3 м кормовой части грузового отсека; сферическая зона непосредственно под плечевым суставом ДУМС.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'