Испытания ДУМС
Разработка ДУМС осуществлялась на предприятии фирмы "СПАР аэроспейс" в Торонто, где была построена модель в натуральную величину, работавшая на испытаниях совместно с макетом кормовой части кабины экипажа "Шаттла". Однако эта модель оказалась функционально неполноценной, поскольку, будучи почти идентичной полетному варианту, она не обладала достаточной прочностью, чтобы выдерживать собственный вес на Земле. По цеху ее приходилось перемещать на лапах, оборудованных устройствами на воздушных подушках, и большинство испытаний проводилось на плоской поверхности, а не в трехмерном пространстве. Макет ДУМС с еще более ограниченными возможностями был построен в Космическом центре им. Джонсона (Хьюстон); для отработки вопросов, связанных с размещением объектов в грузовом отсеке и их развертыванием в космосе, там производились запуски наполненных гелием баллонов в форме КА.
Первое испытание ДУМС состоялось во время второго полета "Шаттла" под кодовым названием STS-2, проходившего 12-14 ноября 1981 г. Хотя продолжительность полета ограничилась двумя сутками, большинство основных контрольных проверок ДУМС было выполнено. В частности, производилось "ощупывание" рабочим органом манипулятора размещенной в грузовом отсеке большой РЛС, предназначенной для картографирования земной поверхности; база данных о контуре РЛС и программа его обхода были введены в компьютер, и все эти операции выполнялись автоматически. Вначале предполагалось использовать ДУМС для перемещения устройства контроля загрязненности, однако из осторожности руководители проекта решили ограничиться его захватом. Но даже это решение было отменено, когда при испытаниях в Канаде второго экземпляра рабочего органа возникли трудности, показавшие, что в полетном варианте может происходить заедание. Тем не менее, несмотря на все сложности, ДУМС успешно состыковалась с приспособлением для захвата указанного устройства.
Головка грунтозаборного устройства посадочного модуля КА 'Викинг': 1 - первичное сито с отверстиями диаметром 2 мм; 2 - соленоидный пускатель-вибратор; 3 - задний скрепер; 4 - магнитная решетка; 5 - щетка; 6 - температурный датчик (внешний); 7 - крышка; 8 - размельчающие зубцы
Полет STS-3 (22-30 марта 1982 г.) оказался неудачным из-за отказа телекамеры запястья, вследствие чего не удалось захватить устройство контроля загрязненности, закрытое (в этом полете) стойкой с аппаратурой для научных исследований. Зато экипаж сумел с помощью манипулятора поднять блок диагностики плазмы (массой 227 кг) и использовать его в серии экспериментов как внутри, так и вне грузового отсека. В одном из экспериментов этот блок поместили прямо в поток электронов, испускаемых электронным прожектором.
В ходе полета STS-4 (27 июня- 4 июля 1982 г.) удалось наконец поднять манипулятором устройство контроля загрязненности (массой 454 кг) и перемещать его вблизи "Шаттла" при запусках маневровых двигателей. Предпринимались также тщетные попытки открыть с помощью манипулятора защелкнутый на кнопку бленкер инфракрасного телескопа.
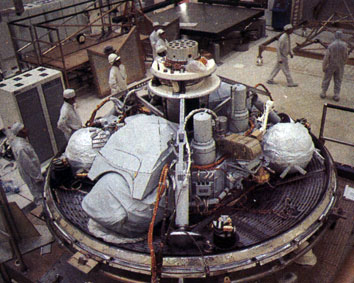
Посадочный модуль 'Викинга-1', опустившийся на поверхность Марса, заключен в герметичную оболочку. В центре справа (между двумя камерами для передачи первичной информации) виден блок, из которого выдвигается грунтозаборное устройство
В последующие два года при эксплуатационных полетах "Шаттла" ДУМС манипулировала грузами все возрастающей массы. В полете STS-7(18-24 июня 1983 г.) манипулятор использовался для развертывания и последующего снятия с орбиты спутника СПАС-01, разработанного западногерманской фирмой "Мессершмитт-Бёльков-Блом" (МББ). Тогда ДУМС "Шаттла" впервые сняла с орбиты спутник, который был доставлен на Землю на том же МТКК. В полете STS-8 ДУМС подняла, а затем водворила на место в грузовом отсеке объект в виде гантели, сконструированный специально для испытаний ДУМС. Один конец гантели был заполнен свинцовой дробью (для оценки моментов инерции), и оба конца снабжены экранами шириной 4,6 м, которые закрывали часть поля зрения оператора, что позволяло оценить трудности, связанные со швартовкой с большим КА.
Самый тяжелый космический аппарат, каким до сих пор удалось манипулировать ДУМС,- система длительной выдержки материалов в открытом космосе (СДВК), развернутая во время полета STS-41 С (6-13 апреля 1984 г.); система размерами 4,3x9,2 м имела массу 9980 кг. Перед развертыванием СДВК манипулятор ДУМС использовался также для приведения в действие кювет с экспериментальными материалами- операция осуществлялась поворотом специального захватного приспособления. Когда корабль "Чэлленджер" удалился от СДВК, телевизионное изображение показало, что СДВК (не имеющая системы управления положением) не совершала заметных движений. Манипулятор не сообщал ей опрокидывающего момента, который вызвал бы ее "кувыркание", воспрепятствовав тем самым обратной загрузке в МТКК.
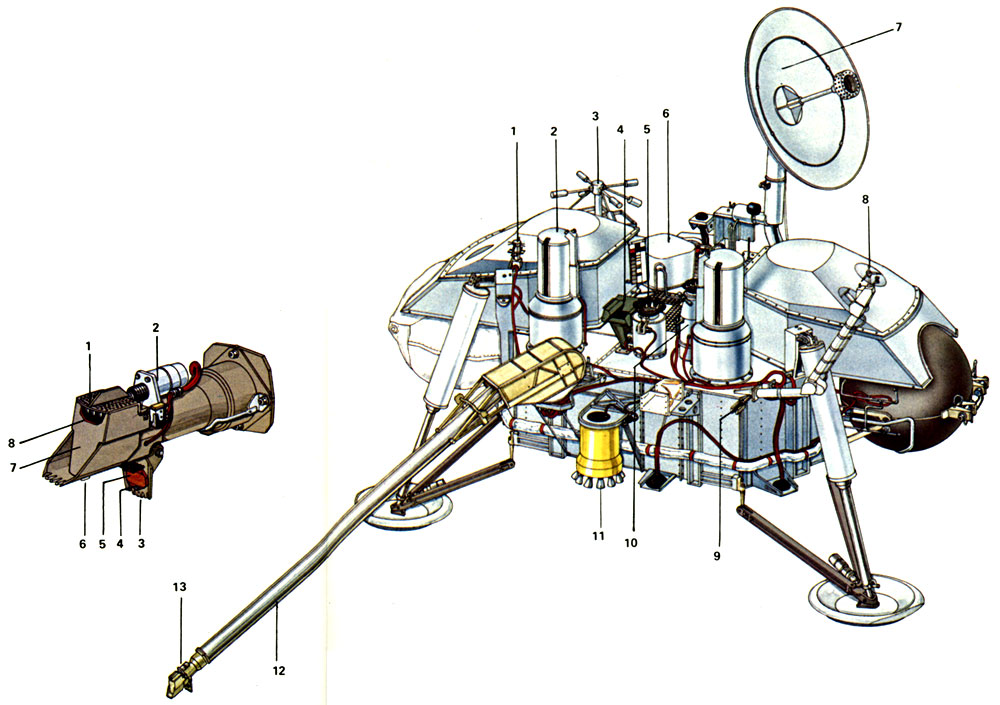
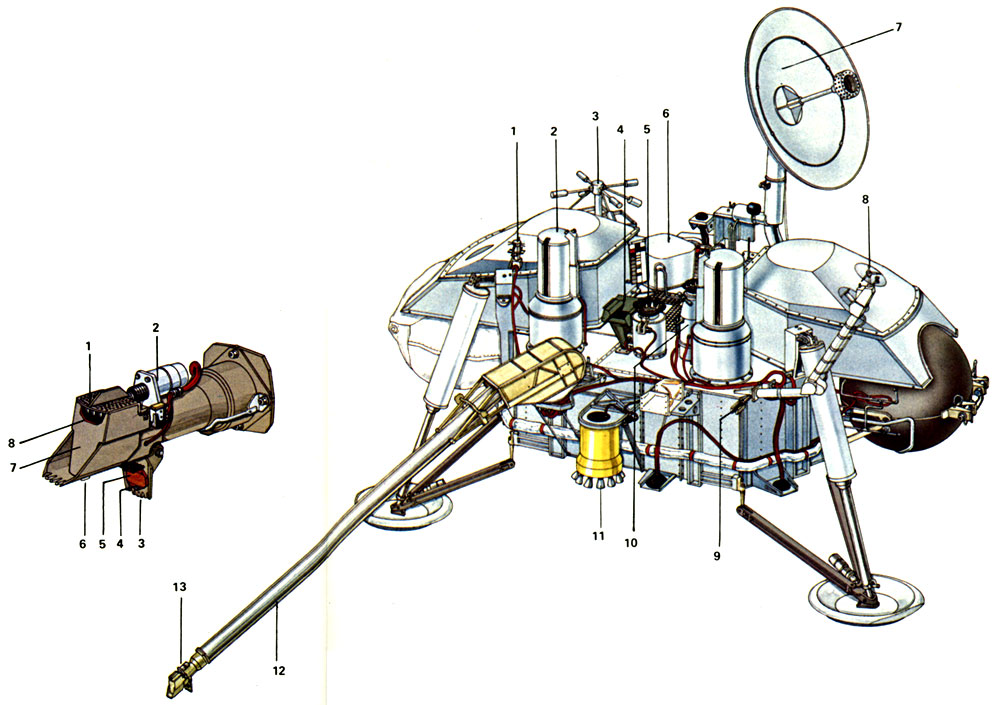
Посадочный модуль КА 'Викинг': 1 - антенна с низкий коэффициентом направленности в S-диапазоне (15,77-19,35 см); 2 - камера № 2 для передачи первичной информации; 3-релейная антенна дециметрового диапазона; 4 - рентге-нолюминесцентный рупор с щитком; 5 - блок обработки биологических образцов; 6 - сейсмометр; 7 - антенна (для прямой передачи) с высоким коэффициентом направленности в S-диапазоне; 8 - датчики температуры и воздушных течений; 9-очистная щетка электромагнита для выдвижения стрелы; 10 - газовый хроматограф с масс-спектрометрическим детектором; 11 - тормозной двигатель (3); 12 - выдвигающаяся стрела; 13 - головка грунтозаборника. В 1976 г. в США были запущены два КА 'Викинг', предназначенные для исследования Марса. Посадочный модуль каждого аппарата был оснащен телескопическим манипулятором значительно более совершенной конструкции, чем те, которые применялись на КА 'Сервейер'. Для сбора образцов грунта манипулятор мог выдвигаться из специального цоколя на расстояние до 2,4 м от посадочного модуля. Головка грунтозаборника помещала взятые образцы в полости в верхней части КА. Посадочный модуль такого типа, как на 'Викинге', по существу, представлял собой миниатюрную автоматизированную лабораторию, где производится химический анализ образцов, а также имеются приборы для регистрации сейсмических колебаний, исследования магнитного поля планеты, определения скорости и направления атмосферных течений
Самому сложному испытанию манипулятор подвергся через двое суток: тогда с его помощью был снят с орбиты спутник "Солар макс", в задачи которого входило исследование излучения Солнца в максимуме активности. Астронавт Джордж Нельсон, управляя пилотируемым маневрирующим аппаратом, не сумел пришвартоваться к спутнику и остановить его медленное вращение; поэтому со спутником сблизился "Шаттл", с которого и была сделана попытка снять спутник манипулятором. Когда повторные попытки швартовки не удались, Нельсон машинально схватился за панель солнечных батарей; в результате на вращение спутника нало-жились легкие колебания, из-за чего астронавт Терри Харт не сумел точно попасть рабочим органом манипулятора в приспособление для захвата спутника. Однако через двое суток по команде с Земли эти колебания были замедлены с помощью имеющихся на спутнике магнитных механизмов коррекции, и 10 апреля захват наконец удалось осуществить, после чего спутник немедленно был пришвартован к специальному кольцу для ремонта.
Эту работу поочередно выполняли Нельсон и Джеймс ван Хофтен; они становились в закрепленное на манипуляторе "стремя" особой конструкции, которое придавало ДУМС некоторое сходство с приспособлениями, используемыми на Земле для осмотра и ремонта линий электропередачи. Такой вариант применения ДУМС был проверен в предшествующем полете STS-41В (3-11 февраля 1984 г.). Ящик с инструментом и лампы, укрепленные на "стремени", заметно облегчали работу астронавтов - органов управления манипулятором в их распоряжении не было. Например, астронавтам, работавшим на манипуляторе, приходилось просить оставшегося на борту "Шаттла" Харта переместить "стремя" в нужное место. По окончании ремонта спутника "Солар макс" ДУМС удерживала его над "Шаттлом", пока шла проверка спутника и развертывались антенны его системы передачи данных; затем спутник был снова выведен на орбиту.
В следующих трех полетах "Шаттла" манипулятору нашлась новая работа. В рейсе STS-41 D (30 августа - 5 сентября 1984 г.) телекамера запястья обнаружила довольно большой ледяной нарост около отверстия для выпуска отработанной воды; с помощью ДУМС этот лед удалось отколоть, что исключило риск повреждения панелей теплозащиты при спуске "Шаттла". В рейсе STS-41G (5-13 октября 1984 г.) ДУМС развернула спутник для измерения радиационного баланса Земли (чтобы развернуть слипшиеся солнечные батареи, ей пришлось сначала потрясти его и подержать под солнечными лучами); кроме того, "локтем" она подтолкнула на место громоздкую антенну РЛС системы картографирования Земли. В полете 51А ДУМС захватила два "заблудившихся" спутника связи, которые после их развертывания в рейсе 41В вышли на неверные, слишком низкие орбиты. Эти спутники не были оборудованы приспособлениями для захвата, но один из астронавтов, воспользовавшись пилотируемым маневрирующим аппаратом, сумел установить их.
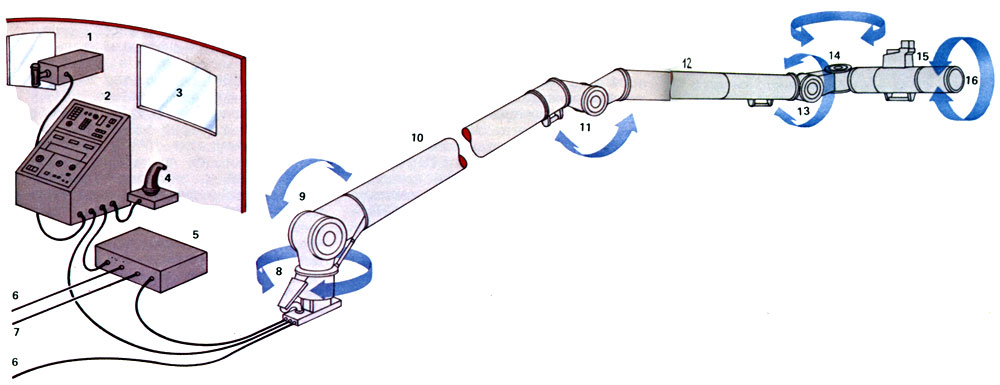
Компоненты системы ДУМС корабля 'Спейс шаттл': 1 - блок управления поступательным перемещением манипулятора; 2 - пульт управления и индикации; 3 - кормовой иллюминатор; 4 - блок управления вращательным движением манипулятора; 5 - интерфейс блоков управления манипулятором; 6 - кабели; 7 - кабель, идущий к универсальному компьютеру; 8 - сочленение для поворота плеча; 9 - сочленение для подъема-опускания плеча; 10- плечо манипулятора; 11 - сочленение для сгибания локтя; 12 - предплечье манипулятора; 13 - сочленение для сгибания кисти; 14 - сочленение для приведения-отведения кисти; 15 - сочленение для вращения кисти; 16 - стандартный рабочий орган. ДУМС - это механический манипулятор, который установлен в грузовом отсеке 'Шаттла'; предназначен для развертывания космических объектов и снятия их с орбиты. Манипулятор извлекает объекты из грузового отсека и выводит их в открытый космос; кроме того, он может снимать с орбиты спутники и укладывать их в грузовой отсек (подобная операция была проделана со спутником 'Солар макс' во время полета 41 С). Базовый комплект системы ДУМС состоит из самого манипулятора, бортового пульта управления и индикации, а также интерфейса для подключения к бортовой вычислительной системе. Как правило, на несущий лонжерон грузового отсека монтируется один манипулятор, но возможна и конфигурация с двумя манипуляторами. Оператор ДУМС задает положение манипулятора и управляет его перемещением с помощью двух ручных органов управления, наблюдая за ним через иллюминаторы командного отсека и на телевизионном экране (изображение создается телекамерами, размещенными как в грузовом отсеке, так и на самом манипуляторе). В режиме управления приводом одного сочленения перемещение манипулятора (поочередно в каждом сочленении) осуществляется исключительно бортовой ЭВМ. Предусмотрена также система вынужденного сброса - на случай, если манипулятор не удастся убрать в грузовой отсек
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'