ДУМС второго поколения
В число задач, которые предстоит решать ДУМС в ее нынешнем варианте, входят снятие СДВК с орбиты, развертывание и снятие с орбиты ряда спутников, замена модулей полезной нагрузки на спутнике "Лизкрафт" фирмы "Фэрчайлд" непосредственно на орбите и развертывание спутников серии "Протей", которые НАСА предполагает использовать для исследования космического пространства, как прежде спутники типа "Эксплорер".
Не исключено, что НАСА проявит больший интерес к блоку повышения энергетической автономности "Шаттла". Блок представляет собой солнечную батарею мощностью 12,5 кВт, которая с помощью ДУМС извлекалась бы из грузового отсека и развертывалась в наиболее выгодном положении по отношению к Солнцу, тем самым обеспечивая "Шаттл" электроэнергией во время длительных полетов.
Предложены проекты ряда усовершенствований ДУМС, а также различные варианты таких систем второго поколения. Наиболее очевидная модернизация - расширение функциональных возможностей рабочего органа. Космический центр им. Джонсона и Калифорнийский технологический институт работают сейчас над созданием нового, многофункционального рабочего органа ДУМС, который обеспечит обратную связь по усилию, причем соответствующие сигналы будут либо отображаться на экране дисплея в пилотном отсеке "Шаттла", либо непосредственно воздействовать на руку оператора. Окончательная конструкция рабочего органа еще не выбрана, но уже на 1987 г. намечено первое полетное испытание.
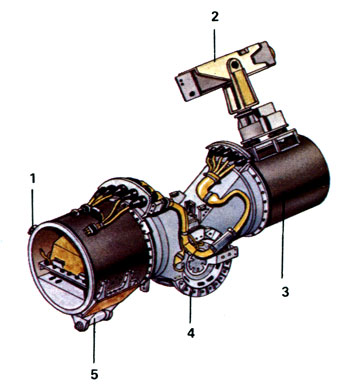
Локтевой сустав ДУМС: 1 - соединение с плечевым звеном манипулятора; 2 - телекамера; 3 - звено предплечья манипулятора; 4 - сочленение для сгибания локтя; 5 - фиксирующий упор; 6 - электронный отсек. Локтевой сустав ДУМС, как и остальные его сочленения, имеет электромеханический привод, который состоит из электродвигателя постоянного тока, оконечной зубчатой передачи и механического тормоза
Исследуется еще один тип рабочих органов - это, по существу, надувной баллон. Алюминиевые решетчатые конструкции, которые предполагается собирать в космосе с помощью ДУМС, довольно хрупки, поэтому Кит Кларк, сотрудник Центра космических полетов им. Маршалла, предложил помещать такой баллон внутрь ферм конструкции. При надувании он должен мягко касаться фермы и "охватывать" ее изнутри, равномерно распределяя усилия по всей ферме, а не давя на нее с большой силой в одной-двух точках. Такое приспособление удобно для захвата предметов с отверстиями. Баллон мог бы представлять собой надувную камеру в оболочке из кевлара, защищающей ее от солнечных лучей и ударов микрометеоритов.
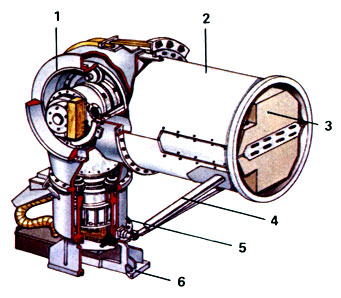
Плечевой сустав ДУМС: 1 - сочленение для подъема-опускания плеча; 2 - электронный блок плечевого сустава; 3 - соединение с плечевым звеном манипулятора; 4 - расчалка плеча; 5 - сочленение для поворота плеча; 6 - крепежный узел. Расчалка плечевого сустава закрепляется только во время запуска 'Шаттла', что позволяет уменьшить нагрузку на зубчатую передачу подъема плеча во время выхода на орбиту. Затем расчалка снимается
Лаборатория реактивного движения предложила эскизный проект трехпалой кисти, которую можно сочленять с ДУМС. По замыслу такая кисть имеет два пальца и противопоставленный им третий, действующие подобно человеческой руке. Пальцы приводятся в движение тросами, которые натягиваются электродвигателями, расположенными у основания кисти. Подобная конструкция позволит снизить размеры и массу кисти и практически устранит проблемы, связанные с влиянием момента инерции, поскольку электродвигатели здесь размещены не на самих пальцах. Благодаря такой конструкции кисть обретет способность отвинчивать болты, отсоединять кабели и т. д. без помощи специализированных рабочих органов. Рабочие органы иных типов могли бы представлять собой захваты с фиксирующими элементами, которые позволят ДУМС удерживать пластины и стержни, не имеющие приспособлений для захвата.
Фирма "СПАР аэроспейс" изучала возможность создания космического подъемного крана с двумя стрелами - каждая вдвое больше длиной, чем манипулятор ДУМС; верхняя и нижняя секции каждой стрелы равны длине грузового отсека и умещаются там в сложенном состоянии. Предполагается, что стрела получит седьмую степень свободы - вращение верхней секции; это повысит ее маневренность, но и усложнит управление ею. Оператор будет находиться в герметизированной кабине между стрелами, которую можно выводить за пределы "Шаттла" и швартовать к нему. Рассматривается также вариант размещения пульта на палубе "Шаттла".
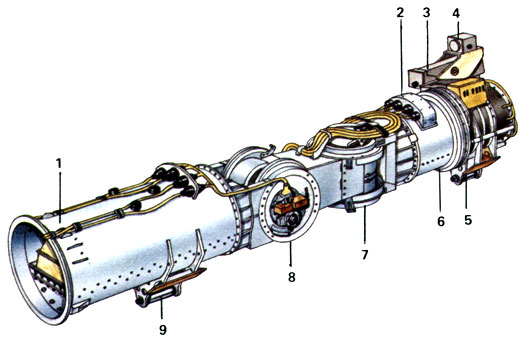
Запястное сочленение ДУМС: 1 - электронный блок в передней части сочленения; 2 - электронный блок в задней части сочленения; 3 - камера системы замкнутого телевидения; 4 - осветитель; 5 - фиксирующий упор; 6 - сочленение для вращения кисти; 7 - сочленение для приведения кисти; 8 - сочленение для сгибания кисти; 9 - фиксирующий упор. Кистевой сустав ДУМС, как и аналогичные сочленения других роботов, обладает тремя степенями свободы
НАСА и корпорация "Грумман аэроспейс" изучали возможность создания более перспективного варианта ДУМС. Пост дистанционного управления в этой системе напоминает уже упоминавшееся "стремя", но имеет органы управления для астронавта, работающего в открытом космосе, и небольшой причальныи штифт, что позволяет фиксировать конец стрелы в зоне, где работает космонавт, причем при пользовании инструментом или перемещении оборудования не возникает никаких колебаний стрелы. Следующим крупным шагом вперед мог бы стать пилотиру* емый рабочий пост - герметизированный модуль с короткими манипуляторами. В таком модуле астронавт может работать без скафандра, осуществляя ремонт при помощи дистанционно управляемых манипуляторов, дотягивающихся до фасада модуля. Вначале модуль, по-видимому, пришлось бы использовать в сочетании с ДУМС, но со временем он мог бы стать автономным летательным аппаратом, что увеличило бы его функциональную гибкость при проведении работ около крупного КА.
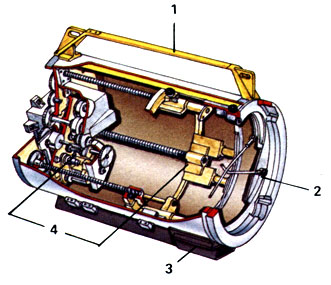
Рабочий орган: 1 - рукоядка для работы с манипулятором в открытом космосе; 2 - силковые тросы, которые охватывают и отпускают приспособления для захвата на обслуживаемых объектах; 3 - электрический разъем; 4 - механизм, натягивающий силковые тросы в направлении к задней части рабочего органа для 'усиления' захвата. Это стандартный рабочий орган силкового типа, закрепляемый на конце манипулятора ДУМС. Возможно также применение специальных захватных приспособлений
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'