Бионика и кибернетика - теоретические основы роботостроения
Бион - ячейка жизни
Если роботы первого поколения больше похожи на бесчувственные часовые механизмы, то роботы второго и третьего поколений смогли появиться только в XX веке, вслед за выдающимися достижениями современной науки и техники. Своим существованием они обязаны бионике и кибернетике. Эти молодые науки наших дней создают научный фундамент для построения роботов второго и третьего поколений.
Необходимость приспособления (адаптации) роботов к изменяющимся условиям внешней среды потребовала разработки органов чувств: слуха, зрения, осязания и др. Здесь конструкторы вынуждены были обратиться к природе, создавшей у живых существ самые разнообразные органы чувств.
Бионика занимается использованием знаний о живых системах для разрешения технических проблем, и в частности, проблем роботостроения. Бионика сравнительно новая наука, изучающая приемы, к которым прибегает природа для решения различных задач. Она использует их в машинах, инструментах, приборах, конструкциях, технологических процессах и т. п. Формально годом рождения бионики принято считать 1960 г. Ученые-бионики избрали своей эмблемой скальпель и паяльник, соединенные знаком интеграла, а девизом - "Живые прототипы - ключ к новой технике".
Стремясь найти в живой природе какой-либо принцип работы биологического механизма и воспроизвести его потом в технике, исследователь-бионик пытается смоделировать этот принцип техническими средствами, сначала приблизительно, затем все точнее и точнее. Таким образом, основной метод бионики - это поиск средств копирования живой природы, средств технического и математического моделирования.
Дело в том, что за время развития жизни на Земле (около 2 млрд. лет), в процессе естественного отбора природа создала массу замечательных образцов "живых инженерных систем". Многие "изобретения" природы заимствовались людьми для конструкций еще в древности. Так, древние арабские врачи, изучая глаз человека, создали линзы - подобие хрусталика глаза. В наше время великий русский ученый Н. Е. Жуковский, исследуя полет птиц, разработал теорию подъемной силы крыла и современную аэродинамику. Можно привести еще множество подобных примеров.
В бионике определились три основных направления: биологическое, теоретическое (математическое) и техническое. Биологическая бионика изучает явления и процессы в живых организмах. Теоретическая бионика занимается разработкой математических моделей их жизнедеятельности. Техническая бионика занимается усовершенствованием существующих и созданием принципиально новых технических систем. При этом, естественно, бионика переносит в технику лучшие творения природы, самые рациональные и экономичные структуры и процессы, выработанные в биологических системах за миллионы лет эволюционного развития.
Перечислим только основные области исследований бионики, имеющие наибольшее отношение к роботостроению:
- исследование биологических рецепторных и анализаторных систем (главным образом, органов зрения, слуха и обоняния) для построения моделей;
- исследование и моделирование нейронов, нейронных сетей, нервных центров и принципов организации мозга живого организма с целью изыскания путей их использования в технических устройствах и системах;
- исследование систем навигации, локации, стабилизации и ориентации представителей мира животных;
- исследование взаимодействия человека с машиной и выявление рационального распределения функций в системе "человек - машина".
Теперь познакомимся подробнее с некоторыми достижениями бионики, имеющими отношение к роботам. Ученым-бионикам принадлежит идея использования биоэлектрических сигналов мышц для управления. С давних времен люди искали способы вернуть руку тем, кто ее лишился. И это удалось сделать нашим советским ученым, используя биотоки мышц. Известно, что когда человек двигает рукой или ногой, то в его мышцах возникают биотоки. Появляющиеся в мышцах биопотенциалы можно снять с помощью электродов и усилить. Первую модель искусственной руки, управляемой биопотенциалами, изготовили в СССР в 1957 г. А в 1960 г. в Москве на конгрессе по автоматическому управлению 15-летний мальчик, у которого не было кисти руки, взял протезом кусок мела и написал на доске ясно и четко: "Привет участникам конгресса!". Протез его кисти управлялся биотоками мышц (рис 16).
Искусственная рука, созданная советскими учеными, вернула к труду уже сотни людей как в СССР, так и за рубежом. Советское изобретение оправдало надежды английских врачей. Доктор Реджинальд Джонс, глава английских медиков, сказал: "Русские достигли огромного прогресса в электронной физиологии...". Приобрела лицензию на советскую биоэлектрическую руку и Канада. Писатель Д. Олдридж назвал это изобретение уроком гуманизма, который оставит глубокий след во многих сердцах.
Несмотря на слабость биотоков, усилитель мышечной энергии можно наделить богатырской силой.
Это можно использовать и во вред людям, что и сделала одна из крупнейших американских фирм, занимающаяся по заданию Пентагона созданием "солдат-роботов" (рис. 17). По замыслу военных деятелей США, бронированный скафандр должен приводиться в движение электромоторами, которые будут управляться биоимпульсами мозга солдата. Такой "сервосолдат" легко сможет один нести тяжелое снаряжение и передвигаться гораздо быстрее, чем обычные люди. Он сможет также при помощи мышечной энергии приводить в движение летательные аппараты.
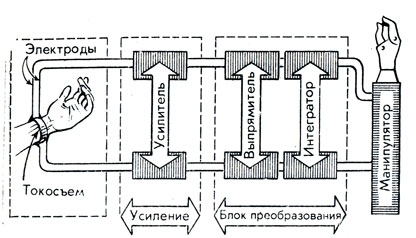
Рис. 16. Протез, управляемый биотоками
Рис. 17. Костюм американского пехотинца
Одним из интересных и перспективных направлений современной бионики, имеющем прямое отношение к роботостроению, является разработка шагающих вездеходов.
Учитывая новые данные о лунной поверхности, полученные в последние годы советскими автоматическими станциями и американскими астронавтами, многие специалисты все больше склоняются к мысли, что лунные вездеходы следует ставить не на колеса, а на ноги в буквальном смысле этого слова. Ноги лучше колес. Не повсюду, конечно, но в горах, в песках, среди ледовых торосов они убедительно доказали свое преимущество. Оправдывают они себя и на Луне.
Какое тысячелетие катится по дорогам Земли колесо! Казалось бы, его многовековая история - верное доказательство совершенства. Так-то оно так, да не совсем. Правда, на дороге ничто не может сравниться с колесом. Но сверните на обочину - ваш автомобиль забуксует в первой же луже, бешено запрыгает на ухабах, не сможет перевалить через небольшой камень или бревно. Подводит колесо; оно предназначено для искусственно и искусно созданных дорог.
Проходимость гусеничной машины гораздо выше, чем автомобиля. Но такой вездеход очень тяжел, испытывает несравнимо большее сопротивление движению (а следовательно, больше расходует энергии). Да и не такой уж он вездеход: преодолевает отнюдь не все препятствия.
Вот почему полки патентных бюро заполняются заявками на принципиально новые "движители", призванные заменить колесо. Говоря "принципиально новые", мы ни в коей мере не оспариваем приоритет Природы. Все живое великолепно обходится без шоссе.
Изобретатель идет за советом к Природе и та предлагает сделать выбор: полет или ползание, ходьба, прыжки или бег. Каждое из этих направлений осваивается с разной степенью успеха. Летать свои машины человек научил довольно хорошо. Отряд ползающих механизмов не столь многочислен. О прыгающих аппаратах и вибраторах инженеры задумались всерьез лишь недавно.
Итак, шагающие устройства...
Первым над этим задумался русский математик П. Чебышев. Он сконструировал "стопоходящую" машину, представляющую собой комбинацию четырех лямбдаобразных механизмов (рис. 18). Пока башмак опирается на грунт, корпус машины равномерно по горизонтальной прямой продвигается вперед. Оторвавшись от земли, башмак описывает в воздухе кривую, напоминающую траекторию стопы пешехода. Чебышев стал родоначальником целого направления в конструировании шагоходов - траекторного синтеза. Последователи ученого стараются, чтобы "лапы" машин копировали движения наших ног.
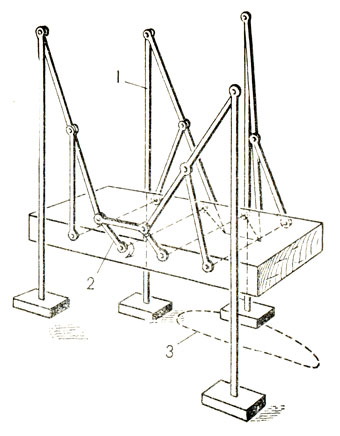
Рис. 18. 'Стопоходящая' машина Чебышева: 1 - опорное звено, 2 - ведущее звено, 3 - оптимальная траектория
К сожалению, у траекторных шагоходов больше недостатков, чем преимуществ. Эти механизмы чрезвычайно громоздки, их кинематическая схема слишком сложна и ненадежна, они очень плохо приспосабливаются к непрерывно меняющимся условиям дороги. Мы, когда нужно, легко изменяем свою походку: сбавляем или прибавляем шаг, выше или ниже поднимаем ноги, ступаем на носок или на пятку...
Над созданием рационального шагающего движителя трудятся многие изобретатели, инженеры, ученые - специалисты разных областей науки и техники: механики и теории механизмов, кибернетики и биологии, математики и медицины. Пройдет немного времени, и шагоход, крепко став на "ноги", отмерит не одну сотню километров по еще не освоенным просторам.
На рис. 19 показана действующая модель космического шагохода "Марс-1", созданного учащимися одесского профтехучилища № 2.
Вспомните "Борьбу миров". Какой представлялась Герберту Уэллсу боевая марсианская машина?
... "что я увидел! Громадный, выше домов, треножник, шагающий по молодой сосновой поросли: машина из блестящего металла, топчущая вереск и сосны... Блеснула молния, и треножник четко вы ступил из мрака, он стоял на одной ноге, две другие повисли в воздухе... Можете вы себе представить складной стул, который, покачиваясь, переступает по земле?"
Нечто подобное (с точки зрения способа передвижения), но пока еще миниатюрное, не выросшее из пеленок эксперимента можно увидеть в лаборатории Института проблем управления Академии наук СССР, возглавляемой д-ром техн. наук проф. Г. П. Катысом. В содружестве с И. К. Мельниченко он создал простой и оригинальный информационный шагающий аппарат (рис. 20).
Это устройство, прочно стоящее на двух треногах, "ходит" не только по ровной поверхности. Оно запросто переправляется через "пропасть" между столами, взбирается на стулья, слезает с них. По сравнению с колесными машинами круг непреодолимых препятствий сузился для этого аппарата весьма ощутимо.
Каков он, этот удивительный аппарат? Представьте себе пустотелую штангу, шарнирно укрепленную на двух ногах-треногах. Относительно каждой опоры она может поворачиваться наподобие семафора в вертикальной плоскости и вращаться, описывая дугу, в горизонтальной. Вдоль штанги по зубчатой рейке перемещается блок, в котором размещены системы управления, измерительное и исследовательское оборудование, источники питания, электроприборы - словом, все механизмы. Нетрудно догадаться, что на него приходится львиная доля веса машины.
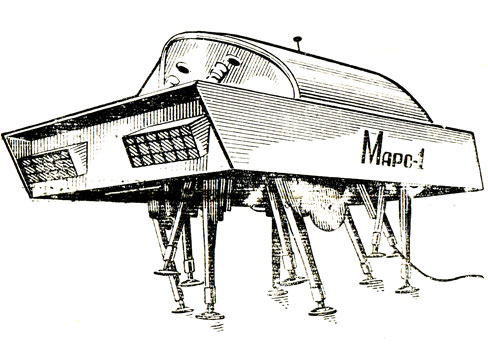
Рис. 19. Космический шагоход 'Mapc-1'
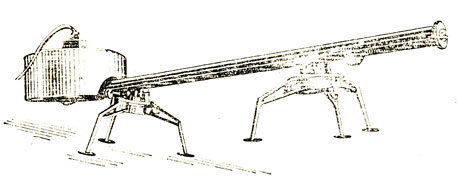
Рис. 20. Информационный шагающий аппарат
Допустим, блок переместился на левый край штанги. Под его тяжестью правый край вместе с правой треногой приподнимается. Угол подъема в зависимости от конструктивных параметров может достигать 60°! Штанга поворачивается вокруг оси левой опоры на заданный угол, и блок ползет вверх по рейке. Как только он перейдет за опору, штанга опустится и встанет на обе ноги. При перемещении блока на правый край поднимается левая тренога, и начинается новый цикл таких же движений.
Одно из замечательных свойств аппарата - то, что он в зависимости от цели исследования может менять свою "походку". Если ему, скажем, задано быстро достигнуть какого-либо пункта, штанга будет поворачиваться на 180° и машина "пойдет" строго по прямой, делая шаги, равные расстоянию между опорами. Если же надо обследовать какую-то площадь, угол поворота штанги резко уменьшится и аппарат "засеменит" мелкими шажками. При этом диаграмма сканирования поверхности может быть самой разнообразной.
Такому автомату-исследователю не страшны ни пропасти (лишь бы их ширина не превышала расстояния между опорами), ни скалы, ни обрывы (лишь бы шагающая опора доставала до макушки или дна). Телевизионные приемники у основания треног вовремя определят размеры препятствий. В режиме шагания аппарат несколько медлителен. Поэтому на ровных участках лучше всего ставить опоры на колеса. Колесно-шагающий аппарат удачно сочетает в себе достоинства шагохода и автомобиля.
Информационный шагающий аппарат пока еще делает свои первые шаги. Но к нему стоит внимательно присмотреться специалистам по изучению космоса, геологам, полярникам, океанологам, географам - всем тем, чей труд и научный поиск немыслим без надежного помощника - вездехода.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'