Некоторые выводы
Рис. 15 дает общее представление о типах роботов и манипуляторов сегодняшнего и завтрашнего дня ("Техника молодежи", 1974, №11, с. 36).
В таблице много пустых клеток: одни из них относятся к случаям, когда роботы данных типов не найдут применения (такие клетки перечеркнуты), другие (отмечены вопросительными знаками) - поле деятельности конструкторов.
Верхние клетки таблицы соответствуют областям применения машин и средам, в которых они должны работать. В первых двух Рядах клеток (сверху) изображены роботы, работающие в обычных производственных и складских помещениях и на площадках. Здесь роботы выполняют погрузочные или другие производственные операции. Машины, изображенные в третьем ряду, помогают рабочим или заменяют их в горячих цехах, в отделениях окраски - словом, там, где вредная среда. Наконец, в трех нижних рядах клеток показаны роботы для опасных условий (камеры с повышенной радиоактивностью, глубины океана, космическое пространство). Здесь роботы и манипуляторы применяются пока для исследовательских целей.
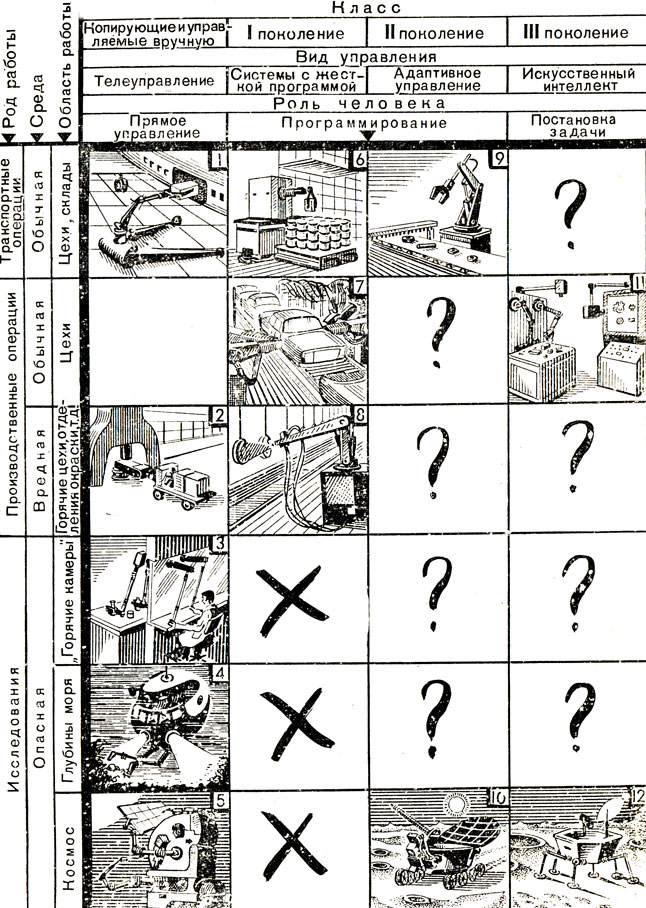
Рис. 15. Типы роботов и манипуляторов
В вертикальных столбцах изображены роботы и манипуляторы систем управления и различных поколений. В первом столбце помещены манипуляторы, непосредственно управляемые оператором. Погрузочная машина и ковочный манипулятор служат как бы усилителями физических возможностей человека. Манипуляторы для атомных, подводных и космических исследований позволяют проводить работу в средах, где присутствие человека невозможно.
Второй столбец объединяет машины с программным управлением, автоматически повторяющие запрограммированные циклы. Это так называемые роботы первого поколения, не способные менять программу в зависимости от внешних условий.
В третьем столбце показаны роботы второго поколения, имеющие адаптивное управление. Они способны приспосабливаться к изменяющимся условиям работы. Этот столбец пока еще мало заполнен, ибо такие машины находятся в стадии разработки.
Последний столбец таблицы отведен для роботов третьего поколения, снабженных искусственным интеллектом. Роль человека в управлении подобными машинами должна сводиться лишь к постановке задачи. И хотя создание таких машин - дело будущего, это будущее гораздо ближе, чем может казаться.
Цифрами в клетках обозначены:
1. Копирующая погрузочная рука (проект).
2. Ковочный манипулятор.
3. Копирующий манипулятор для работы с радиоактивными образцами.
4. Аппарат для подводных исследований (проект).
5. Аппарат для работы в космосе (проект).
6. Робот-укладчик фирмы "Токио-Крейки" (Япония).
7. Роботы фирмы "Юнимэйт" (США) на линии сварки автомольных кузовов.
8. Специализированный робот фирмы "Тральфа" (США) для покрасочных работ.
9. Робот со "зрением" в виде фотоэлектрической линейки, разработанный Ленинградским институтом авиационного приборостроения.
10. Луноход.
11. Экспериментальный сборочный робот, "читающий" чертеж.
12. Шагающий исследовательский автономный робот (проект).
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'