Роботы наступают
Роботы - разумые машины
Роботов называют разумными машинами. Робот - это автомат, выполняющий сложные операции, имитирующие человеческие действия. Росс Эшби, известный биолог и кибернетик, как-то заявил: "Нечего спрашивать о возможностях создания разумных машин. Инженеры и конструкторы создают их уже сейчас!". И, в самом деле, пока ученые и писатели ведут дискуссию о роботах, наиболее одержимые делают их.
Роботов с увлечением конструируют и в школьных технических кружках, и в серьезных научных организациях.
Идея создания искусственных человекоподобных существ привлекала людей с давних пор. Вспомним хотя бы античный миф о Пигмалионе, изваявшем статую и оживившем ее, средневековые мечты о гомункулусе - искусственном человеке или чешские сказания о глиняном великане Големе.
Не удивительно, что механики древности неоднократно пытались воплотить мечты в реальность, построить механические человекоподобные автоматы - андроиды. Слабый уровень техники компенсировался богатым воображением, хитроумным сплетением зубчатых колес, пружин и рычагов.
Весной 1774 г. швейцарский часовщик Пьер Дро и его сын Анри показали изумленным согражданам сделанного ими механического писца. Писец был как живой. Он с важным видом макал гусиное перо в стоящую перед ним чернильницу и ровным красивым почерком писал целые фразы. При этом он двигал головой и любовно оглядывал написанное. Закончив свой нелегкий труд, писец посыпал бумагу песком, а затем стряхивал ее. Эффект был огромным.
Кроме писца, талантливые мастера сделали механического рисовальщика, с самым естественным видом воспроизводящего довольно сложные рисунки, и музыкантшу, великолепно исполнявшую на фисгармонии сложные музыкальные произведения. Это были поистине шедевры своего времени. Однако неприятностей от создания первых роботов было больше, чем славы. Все непонятное опасно, - решила святая инквизиция, и на всякий случай упрятала Анри Дро в тюрьму, когда он показывал своих механических людей в Мадриде. Отец и сын Дро вскоре умерли, а их творения переходили из рук в руки. Лишь в 1906 г. они были приведены в порядок и помещены в швейцарский музей, где до сих пор вызывают восторг посетителей.
В 1810 г. немецкий механик Иоганн Кауфман построил механического трубача, виртуозно исполнявшего несколько сложных пьес на трубе. Этот автомат сейчас можно увидеть в Мюнхенском музее техники.
Рис. 1. Первый советский робот
Рис. 2. Робот Чкаловской СЮТ
Рис. 3. Кибернетический робот-гигант
Рис. 4. Робот-секретарь
На этом увлечение андроидами, пожалуй, и закончилось. Возможности механики как таковой были исчерпаны. Лучшие конструкции, созданные в средние века, позднее просто повторялись в разных вариантах. Лишь в XX веке крупные достижения электроники, физики и электротехники позволили вновь приступить к конструированию человекоподобных автоматов, но на более высоком уровне. С легкой руки Карела Чапека их стали называть роботами. В отличие от андроидов роботы обладают обратной связью, более гибки в действиях и более чувствительны к изменению внешней обстановки. У них появилось зрение - фотоэлементы, слух - микрофоны, речь - громкоговорители.
Советские строители роботов создали довольно много очень интересных моделей, которые получили высокие оценки. Один из первых советских роботов демонстрировался на Всемирной выставке в Париже в 1937 г. (рис. 1).
В 1960 г. огромным успехом пользовался выставленный на ВДНХ робот, сконструированный ребятами на Чкаловской станции юных техников (СЮТ) Московской области (он выполнял 18 команд) (рис. 2).
Там же, на Чкаловской СЮТ, в 1969 г. создали кибернетического робота-гиганта, успешно экспонированного на Всемирной выставке ЭКСПО-70 в Японии (рис. 3).
Робот-секретарь из Калуги (рис. 4) по заданной программе включает и выключает освещение, поддерживает постоянную температуру в квартире. В указанное время он включает приемник или телевизор. Утром будит хозяина, включая магнитофон с записью текста утренней гимнастики. Когда хозяина нет дома, сообщает об этом по телефону, а если требуется, то записывает телефонную просьбу на магнитофон.
Широкую известность получили робот "Сепулька", "работающий" экскурсоводом в Политехническом музее в Москве, и его "коллега" с ВДНХ - "Сибиряк-2". Целую семью роботов построили калининградцы.
Так что, если вы задумали строить робота, то есть у кого поучиться.
О схемах этих роботов и конструкциях многих других любительских моделей речь пойдет впереди.
Все это - занимательные модели, пока не имеющие широкого применения. Роботов делали в разных местах, разные конструкторы, но все они внешне сходны с человеком.
Такие машины не прихоть. Ведь мы, люди, создали вокруг себя целый мир, приспособленный к нашей собственной природной конструкции. Мебель в доме, лестницы, двери, инструменты и станки в цехе, автомобили, измерительные приборы, различные индикаторы и ручки управления - все сделано так, чтобы было удобно пользоваться человеку. Машина, которая сможет постоянно действовать рядом с нами и использовать рассчитанные на нас вещи и механизмы, должна походить на человека - это экономно. Человекообразную форму современных роботов можно пока считать преждевременной, но когда-нибудь она станет закономерной вследствие совершенствования самих роботов. А менее сложные роботы, возможно, окажутся похожими на более простых живых существ (пауков, гусениц и др.).
Следовательно, человекоподобный робот далеко не фантастика, а реальность. Ценнейшее свойство роботов - способность их выполнять определенные задания лучше, быстрее и точнее человека. Более того, в противоположность людям и животным роботам не свойственны рассеянность и физическая усталость. Без помощников-роботов управлять современной техникой стало трудно. Вот почему роботы все чаще используются на производстве, в космосе, почти во всех областях человеческой деятельности.
Разработка роботов в Советском Союзе и в социалистических странах преследует гуманные цели - освобождение человека от монотонного и изнурительного труда для творческой деятельности. В наши дни трудящиеся стали особенно требовательны к самой работе и ее смыслу. А когда процесс производства автоматизируется, от рабочего перестают требовать мастерства. Вот здесь-то и нужны роботы. Они должны с "умом" выполнять неквалифицированные производственные операции. На подобных ручных и вспомогательных работах занято очень много людей. Передать эти операции "разумным" машинам - значит привести в действие огромные резервы повышения производительности труда.
Кроме того, как показала жизнь, автоматические цехи и заводы, оснащенные "жесткими автоматами", т. е. такими, которые могут выполнять лишь несколько вполне определенных операций, трудно приспособить к быстрому изменению технологии, использованию другого сырья, выпуску новой продукции. Для этого часто необходима коренная перестройка автоматических линий. Здесь также нужны адаптирующиеся, т. е. приспосабливающиеся к изменяющимся условиям, автоматы - роботы.
Главная особенность роботов завтрашнего дня будет заключаться в том, что в их памяти обязательно должна будет содержаться модель внешнего мира, сформированная человеком либо образованная искусственным интеллектом в результате самостоятельного накопления сведений о реальной внешней среде. Это позволит роботу действовать не только по жесткой программе, заложенной в его память, но также по методу проб и ошибок.
Роботам предстоит пройти огромный путь развития. Действующие сегодня модели роботов первого поколения могут выполнять задания человека лишь в особо приспособленных для них неизменных условиях, что существенно сужает область их применения. Однако второе поколение механических работников, снабженных техническими органами "чувств" и более совершенным "мозгом", в состоянии приспосабливаться к изменениям окружающей среды и, следовательно, действовать более "разумно", осваивать значительно более сложные специальности. Целый ряд опытно-промышленных образцов таких роботов уже создан мировым роботостроением. Советские специалисты также имеют почти десятилетний опыт их конструирования.
На научном горизонте уже показались искусственные создания третьего поколения - так называемые "интеллектуальные" роботы. Они ушли намного дальше своих предшественников прежде всего в обработке информации и по возможностям автономного, без помощи человека, целенаправленного поведения в меняющейся обстановке. Пока такие "интеллектуальные" роботы существуют у нас и в других странах только в виде математических и лабораторных моделей, обладающих, как осторожно говорят, "элементами искусственного интеллекта".
Однако, хотя действующие роботы - очень примитивное подобие человека, возможности их безграничны. И недаром в целевой программе Государственного комитета по науке, по которой ведется создание промышленных роботов в СССР, наряду с созданием комплексно роботизированных участков и цехов предусматривается разработка таких вопросов, как взаимодействие роботов друг с другом, экономические, социальные и философские проблемы, связанные со взаимоотношениями людей и кибернетических помощников.
Но все это проблемы будущего. Сегодня наука и техника ищут возможности освободить человека от всех видов именно неинтеллектуального, неинтересного и тяжелого физического труда. Без массового применения промышленных роботов их решить невозможно.
От появления первых роботов-игрушек до совершенных роботов первого, второго и третьего поколений роботов - помощников человека прошло более двухсот лет! Как же шло развитие разумных машин и каково их состояние в наши дни?
Роботы первого поколения, созданные в XVIII веке, представляли собой замечательные произведения искусства талантливых мастеров, они и сейчас остаются выдающимися произведениями механики. Все они, однако, имитируют лишь внешнее сходство с человеком. Но уже в XIX веке автоматы, внешне не похожие на человека, стали выполнять сложную работу людей и освободили их от многих разнообразных операций. Затем в различных отраслях промышленности стали появляться циклические автоматы в виде станков-автоматов.
В настоящее время существует множество разнообразнейших станков-автоматов, например: токарные, фрезерные, копировальные, шлифовальные, зуборезные, гайконарезные, болтонарезные, шурупные, гвоздильные, литейные, формовочные, сварочные, спичечные, обувные, печатные, переплетные, бутылочные, развесочные, упаковочные.
Нет, пожалуй, такой отрасли производства, где не применялись бы автоматы. Каждый такой станок выполняет без помощи человека сложный цикл различных операций, необходимых для изготовления определенного изделия.
Автоматы обладают одним общим свойством - они "запоминают" определенную последовательность сложных движений (операций) и после запуска многократно повторяют эту последовательность. "Запоминание" заданной последовательности движений, составляющей цикл автомата, осуществляется с помощью кулачков и шаблонов.
Характерной чертой автоматов, общей для них и для автоматов-игрушек, является наличие определенной фиксированной и наперед заданной программы действий, программы выполнения цикла. Каждая элементарная операция, выполняемая подобным автоматом, имеет вполне определенное место в цикле, длится строго определенное время и всегда выполняется совершенно идентично (с точностью до ошибок изготовления самого автомата).
Несмотря на примитивность подобных автоматов, они очень широко распространены. Такие автоматы полностью утратили сходство с человеком и поэтому их не всегда относят к роботам, хотя в принципе это роботы.
В качестве примера циклического станка-автомата на рис. 5 показан обрабатывающий центр японской фирмы "Мицуи Сэйки".
Обрабатывающий центр "Мицуи Сэйки" имеет магазин 1 барабанного типа на 32 инструмента. Автоматическая смена инструмента осуществляется с помощью подвижной тележки 2 с двумя манипуляторами. Для этого магазин поворачивается так, чтобы нужный инструмент оказался в верхней точке. Левый манипулятор опускается, захватывает его и, пока тележка движется к шпинделю станка 3, подтягивается вверх. Аналогичные операции проделывает и правый манипулятор, чтобы извлечь из шпинделя инструмент, выполнивший свою задачу. Теперь левая "рука" опускается вниз, головка шпинделя подается вперед, захватывает хвостовик инструмента, и станок готов продолжить обработку детали.
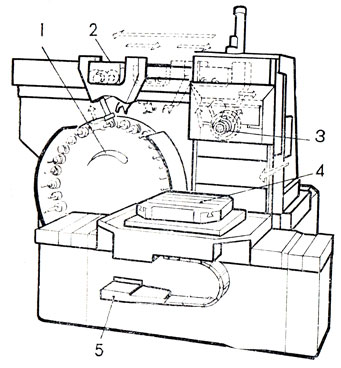
Рис. 5. Обрабатывающий центр
Чтобы деталь можно было обрабатывать со всех четырех сторон, станок оснащен поворотным столом 4. А точность ее перемещений контролирует следящая электроиндукционная система 5. Основные элементы этой системы - вытянувшиеся по всем трем осям плоские индукционные катушки. Двигающийся рабочий стол наводит в них электрический ток, по которому точно определяется положение детали.
Однако циклические станки-автоматы не удовлетворяют все возрастающим требованиям современного производства - резкого сокращения применения рабочей силы или замены рабочих на однообразных операциях. Они занимают большие производственные площади и не обеспечивают требуемых темпов роста производительности труда. На смену им пришли автоматические линии.
Электронные вычислительные машины произвели революцию не только в сфере расчетов и математического моделирования. Они подготовили почву для широкого внедрения автоматизированных систем организационного управления (АСУ) предприятиями, промышленными комплексами и даже целыми отраслями народного хозяйства. Пронизывая всю экономику нитями вертикальных связей, АСУ открыли пути для решения задач управления, планирования и учета на качественно новом уровне. Однако для того чтобы получить максимальный эффект, и саму сферу производства следует поднять на более высокую ступень развития. А это означает, что уже сегодня необходимо думать о создании технических средств нового типа, позволяющих полностью автоматизировать процессы во всех отраслях промышленности.
Задача эта далеко не так проста, как может показаться на первый взгляд. Идея автоматизации наглядно доказала свою плодотворность на примере непрерывных технологий, которые широко применяются в химии, металлургии, нефтепереработке. Но в машиностроении, радиоэлектронике, приборостроении и других отраслях, где основную роль играют прерывистые процессы, дело обстоит намного сложнее.
Приведем пример из области машиностроения. Прежде чем деталь займет место в конструкции машины, она должна пройти по длинной цепочке различных станков. Каждая смена оборудования - это разрыв в технологии, неизбежные потери времени и сил: деталь надо не только передать от станка к станку, а на каждом из них ее следует установить в заданном положении, а инструмент точно расположить по отношению к обрабатываемой поверхности. Поэтому значительную часть своих усилий рабочий тратит на малопроизводительные вспомогательные операции.
Конечно, подобные потери особенно велики на предприятиях с мелкосерийным производством. А при массовом выпуске продукции их удается намного сократить благодаря станкам-автоматам и автоматическим линиям. Но, к сожалению, требования сегодняшнего дня заставляют пересмотреть наши взгляды и на эти устройства. Одно из главных условий технического прогресса состоит не только в том, чтобы быстро осваивать выпуск новых машин, оборудования, приборов, необходимо постоянно совершенствовать и серийную продукцию. А для этого производство должно обладать максимальной гибкостью. У станков-автоматов и автоматических линий в противоречие с этим требованием вступает сам принцип действия, в основу которого положена жесткая, незыблемая схема технологии. Поэтому их переналадка на выпуск не только новой, но даже видоизмененной продукции связана с большими затратами времени и сил. Это не означает, что машины-автоматы исчерпали свои возможности и им предстоит сойти со сцены. Просто они уже не в состоянии решать многие задачи производства на высоком уровне.
Что можно сделать для того, чтобы наделить дискретные технологические процессы желаемой гибкостью?
Многообещающие перспективы в решении этой проблемы открыли станки с числовым программным управлением (ЧПУ). Жесткий копир - программное устройство станков-автоматов - здесь уступил место ленте с перфорационной или магнитной записью программы. Достаточно ее сменить - и станок готов к обработке нового изделия. Идея такого управления доказала свои преимущества не только на примере простых металлорежущих станков, но и на многооперационных агрегатах, на прессах и штампах.
Однако опыт прошедших лет показал, что даже в тех случаях, когда станки с ЧПУ применяются большими группами "под эгидой" общей ЭВМ, получаемый экономический эффект далек от максимального. И виной тому все те же большие затраты времени и сил на передачу изделий от станка к станку. Как избежать этих потерь?
Перспективным кажется такое решение: достаточно большая группа станков с ЧПУ объединяется в единую систему с помощью гибкой сети транспортных средств. Причем эти средства передают детали от станка к станку и устанавливают в нужном положении без участия человека. Л весь комплекс оборудования управляется по единой программе, которую задает общая ЭВМ. Управляемые по программе роботы-загрузчики захватывают детали "механическими руками" и доставляют их к станкам. Они же возвращают детали в накопитель после выполнения очередной операции. По сравнению с обычным станочным парком даже небольшие автоматизированные комплексы позволяют сократить численность обслуживающего персонала на 70%, вдвое уменьшить производственные площади и повысить производительность труда на 300%.
Весьма широкими оказались производственные возможности технологической системы ROTA-FS-200 (рис. 6), созданной на станкостроительном комбинате имени 7 октября в Берлине. В ней магазин-накопитель выполнен в виде двух стеллажей, между которыми движется робот-загрузчик.
Подобно агрегатам в автоматической линии все восемь станков (1) здесь действуют согласованно, подчиняясь командам вычислительного центра (2). Чтобы станки могли работать в автоматическом режиме, каждый из них оснащен блоком управления (3) и роботом-загрузчиком (4). Последний подает заготовки из промежуточных магазинов (5) и возвращает в них обработанные детали, сменяет инструмент и элементы оснастки, Промежуточные магазины (5) приводятся в действие с помощью устройств с подъемным механизмом (6). Одновременно эти магазины играют роль своеобразных контейнеров, в которых детали и инструмент циркулируют по транспортной сети системы. А "узловой станцией" сети служит центральный накопитель (7) в виде двух стеллажей, между которыми движется штабелер-погрузчик (8). Все электрооборудование смонтировано в шкафах (9). А контроль за работой системы ведется с центрального пульта управления (10).
По такой схеме работают автоматические линии сборки корпусов автомобилей. В начале операции сварки корпусов автомобилей рабочие укрепляют их на конвейере, который перемещает корпус автомашины к линии, состоящей из 14 роботов (по 7 с каждой стороны), выполняющих точечную сварку. Корпус автомашины перемещается от одного сварочного поста к другому. В это время роботы поочередно подводят сварочные пистолеты к корпусу автомашины и производят сварку. Поскольку кинематическая система "руки" робота имеет много степеней подвижности, робот может передвигать сварочный пистолет, следуя сложным изгибам корпуса автомобиля. За один час роботы сваривают по 57 корпусов. Хотя роботы очень сходны со специализированными автоматическими линиями, они обладают большими преимуществами при монтаже и наладке сборочной линии. Кроме того, в линию, оснащенную роботами, значительно легче вносить коррективы при изменении конструкций изготовляемого оборудования.
Подобные манипуляторы с программным управлением, называемые промышленными роботами, уже несколько лет выпускаются серийно. Эти манипуляторы имеют запоминающее устройство, в которое можно заложить программы совершения тех или иных двигательных операций. Программирование движений манипулятора обычно заключается в выполнении им под руководством оператора требуемой работы, состоящей из последовательных перемещений "руки" робота в пространстве. После записи конечного положения в запоминающее устройство робот может повторять эту работу автоматически, причем в конечное положение он будет приходить кратчайшим путем, независимо от пути, пройденного им при записи программы.
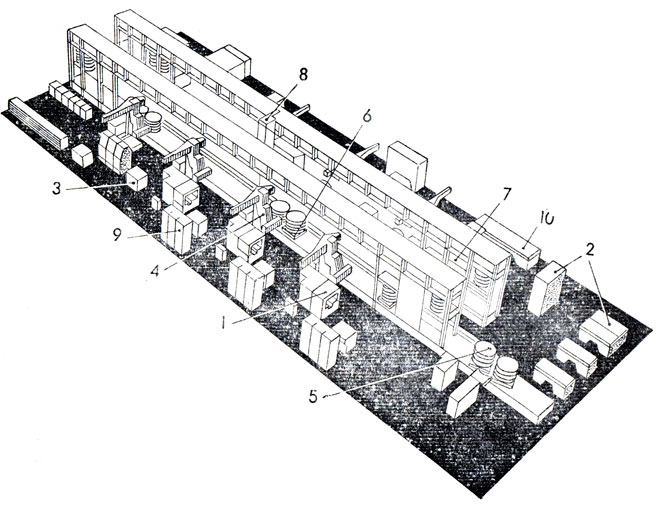
Рис. 6. Система ROTA-FS-200
Наиболее крупными фирмами, поставляющими промышленные роботы-манипуляторы, в США являются "Юнимэйшн" и АМФ. Созданный ими робот "Юнимэйт" - однорукий гидропневматический манипулятор. Его масса 1590 кг, радиус действия 2,3 м, максимальная масса переносимого груза 34 кг. Детали массой до 11,3 кг он переносит с максимальной скоростью, поворачиваясь на 220° за 2 с. Запоминающее устройство и рука входят в один блок. Рука повторяет свои положения с точностью до 1,27 мм. Память системы обеспечивает запоминание до 200 различных движений.
У робота "Версатран" исполнительные механизмы (массой 590 кг) расположены отдельно от блока управления (массой 136 кг). Он имеет две руки, радиус действия у него в два раза меньше, чем у робота "Юнимэйт", полезная нагрузка 9,1 кг, погрешность воспроизведения положения 3,17 мм, В "Юнимэйте" программа записывается на специально разработанный магнитный барабан, в "Версатране" - на магнитную ленту.
"Юнимэйт" и "Версатран" наиболее широко применяются в тяжелой промышленности (ковка, литье в кокели, прессование пластмасс, окраска, загрузка печей). Около половины автоматов используются в металлообрабатывающей промышленности.
Стоимость одного промышленного робота 18 - 25 тыс. долл. По мнению специалистов, тем заводам, которые работают более чем в одну смену, автоматы, несомненно, выгодны. При работе в две смены автомат окупит себя за год, при работе в одну смену - за 2,5 года.
Большим недостатком существующих промышленных роботов является отсутствие устройств сбора информации о среде, в которой они функционируют. Это чрезвычайно ограничивает сферу их применения, так как они лишены возможности приспосабливаться к внешней среде и перестают выполнять свои функции даже при незначительных ее изменениях. Поэтому в настоящее время исследования направлены на то, чтобы создать роботы, способные самостоятельно взаимодействовать с реальной внешней средой.
Сейчас роботы - машины с руками - уже не научная фантастика, а рабочие устройства, применяемые постоянно и повсеместно. Им на смену идут интегральные роботы - очень сложные конструкции, управляемые с помощью электронных вычислительных машин.
Представьте себе, что вы находитесь в одном из цехов завода турбинных лопаток. Перед вами нагревательная печь, загруженная деталями. Детали уже нагрелись до нужной температуры (1000° и более). Рабочий вынимает их из печи и опускает в ванну с маслом. Жара, дым. Работа утомительная и однообразная. Так почему бы не создать автомат, который заменит рабочего у печи и масляной ванны? Сделать такой автомат нелегко. Дело в том, что элементарнейшее действие - взять какой-либо предмет и переложить его на другое место - довольно сложный процесс. Надо, чтобы автомат, во-первых, увидел и опознал деталь, во-вторых, определил, где и как удобнее всего ее взять, в-третьих, подвел точно к этому месту свою руку, затем ощутил соприкосновение с деталью и только после того сжал клешню. Далее идут тоже весьма трудные задачи: осторожно вынуть деталь из печи, не задеть по пути другое оборудование и препятствия, аккуратно опустить груз в масляную ванну. Традиционному автомату все это не под силу. Здесь нужен "думающий" автомат-манипулятор, управляемый ЭВМ.
Дело не только в том, что любой механизм, предназначенный заменить руку человека, нуждается по крайней мере в шести степенях свободы, чтобы обеспечить как поступательное, так и вращательное движение переносимого предмета (рис. 7).
Эволюция превратила человеческую руку в тончайший, непревзойденный инструмент. Ее пальцы, по желанию медлительные или быстрые, способны к самым тонким дифференцированным движениям, а если надо, проявляют и достаточную силу. Сорок две мышцы дают кисти чудесную подвижность и ловкость. Но главная трудность - узнать предмет. Над этой задачей - научить ЭВМ распознавать образы - многие годы бьются ученые мира. Лишь недавно удалось разработать методы, пользуясь которыми электронные устройства смогли, допуская не слишком много ошибок, отличать куб от пирамиды или от шара. Понятно, что такие машины должны обладать зрением (например, телевизионной камерой), большим объемом памяти, обширными "мыслительными" способностями.
Представьте себе, что вместо рабочего у печи стоит робот - механическая рука. В управляющей вычислительной машине заложена программа его действий. Нужно только отдать команду приступить к работе... (рис. 8).
Робот зашевелился, протянул клешню в печное отверстие, нащупал раскаленную деталь, взял ее точно посередине, осторожно вынул, перенес, минуя окружающие предметы, к ванне и опустил в масло. Вернулся за второй деталью, потом за третьей, четвертой... И так без устали, без передышки. Его не смутит, если в печи он обнаружит детали другой конфигурации, другой массы (для обычного, механического автомата это неразрешимая проблема): сведения о возможных изменениях условий труда заложены в памяти робота, т. е. в ЭВМ, и он гибко меняет свое поведение, переходит от одного вида работы к другому.
Для этого у него есть все возможности. В его клешне расположены фотоглаза, которыми робот "видит" деталь и на расстоянии и в непосредственной близости (рис. 9). Рабочие поверхности клешни-схвата имеют органы осязания - тактильные датчики. Суставы "чувствуют" и утлы поворота различных элементов руки (а всего она имеет семь степеней свободы) и усилия, которые приходится прилагать гидравлическим мускулам во время работы. Чтобы стало ясно, сколь сложна и чувствительна эта механическая рука, достаточно сказать, что в ЭВМ с нее должны непрерывно поступать и перерабатываться сигналы от 80 разнообразных датчиков. Но и такого потока информации оказывается мало для надежной и безупречной работы. Сейчас ученые и конструкторы хотят одеть металлическую руку особой "кожей", которая, как и человеческая, будет информировать "мозг" о соприкосновении ее с предметами. Это необходимо для безопасности и самого робота и всего того, что находится вокруг, - людей, оборудования, конструкций.
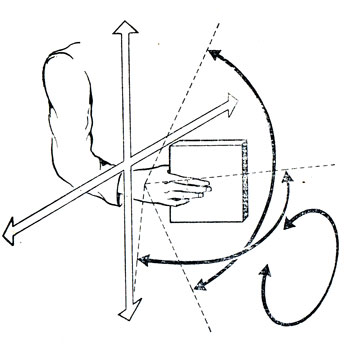
Рис. 7. Степени свободы руки человека
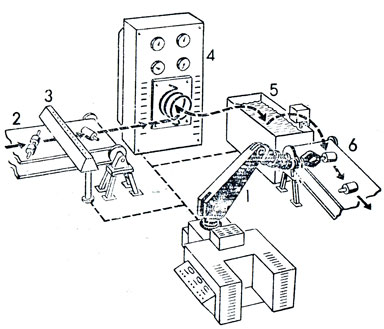
Рис. 8. Автомат для поверхностной закалки деталей: 1 - механическая рука с вычислительным устройством (штриховой линией показана связь со всем оборудованием); 2 - конвейер; 3 - фотоэлектрическая линейка; 4 - индукционная печь; 5 - масляная ванна; 6 - конвейер готовой продукции
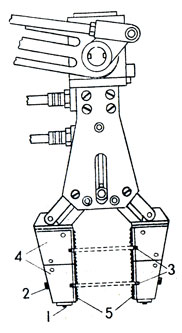
Рис. 9. Механическая рука робота: 1-3 - фотодатчики обнаружения объекта; 4 - чувствительный кожух (тактильные датчики); 5 - датчики силы сжатия
Несмотря на всю сложность, интегральные роботы пока еще способны решать только очень простые задачи, но они развиваются и уже используются на заводах. На рис. 10 приведена схема интегрального робота, занимающегося построением "домиков" из кубиков под зрительным контролем. На схеме показана телевизионная камера, наблюдающая за работой руки (глаз системы), механическая рука - манипулятор и электронное вычислительное устройство, управляющее рукой на основе анализа телевизионных сигналов и информации о положении руки. Эта казалось бы очень простая задача требует создания сложнейших программ работы ЭВМ и огромного объема предварительных исследований на основе самых современных математических методов. Современные системы интегральных роботов способны воспринимать достаточно сложные ситуации в трехмерном пространстве, вырабатывать планы решения поставленных им задач, осуществлять зрительный контроль за их выполнением и взаимодействовать с человеком на естественном языке.
Робот, обладающий "разумом" или по крайней мере совершающий разумные поступки, все еще остается в области фантастики. Но некоторые из возможных "предков" подобных автоматов уже действуют в лабораториях искусственного разума. В Массачусетском технологическом институте компьютер, снабженный "глазом"- телевизионной камерой и искусственной гибкой "рукой", способен различать кубики различной формы, размеров и цвета, и собирать их в разных комбинациях без специального предварительного инструктажа. Ведутся исследования, где связанная с ЭВМ "рука" с помощью "глаза" способна собрать водяной насос из рассыпанных в беспорядке частей. Ученые стремятся создать систему "рука - глаз", которая могла бы различать и снимать с движущегося транспортера необходимые детали. Но даже для овладения такими элементарными навыками требуется "работа мысли" мощных ЭВМ, и исследователи еще весьма далеки от создания автономных роботов. Большинство ученых идут по пути эвристического метода решения проблем, т. е. решения задач методом проб и ошибок. При этом вычислительная машина вынуждена удерживать в своей памяти множество сведений и при решении какой-либо задачи отыскивать те из них, которые могут оказаться полезными.

Рис. 10. Схема интегрального робота
В сущности машина не обладает какими-либо твердо усвоенными навыками выполнения той или иной операции. Если надо что-нибудь собрать, робот не вспоминает, что здесь нужна отвертка, а начинает "рассуждать". "Есть обстоятельства, когда следует пользоваться отвертками, а есть обстоятельства, когда лучше применять гаечные ключи..."
Немало преимуществ по сравнению с эвристическим методом имеет другой, так называемый адаптивный метод, при котором роботу не приходится принимать решение, просматривая все известные ему факты. Оператор не снабжает своего подопечного запоминающим устройством. Вместо этого он учит его решать вполне определенную проблему. Запрограммированная считать свои правильные действия "наградой", а неправильные - "наказанием", вычислительная машина наблюдает и учится. Когда она сталкивается с задачей, сходной, но не идентичной с предыдущей, то для ее решения адаптируют или приспосабливают полученные ранее навыки.
Президент фирмы, специализирующейся на производстве устройств, решающих задачи адаптивным методом, считает, что у подобной системы большое будущее, поскольку отпадает значительная часть сложного и долгого процесса программирования, без которого не обойтись при пользовании эвристическим методом. Адаптивный способ решения, говорит он, это программа логических рассуждений компьютера, который умеет строить модели, не обременяя ум сложностями процесса. Модель, создаваемая ЭВМ, - это изложенный математическим языком его план действий. В развитии адаптивного метода - путь к созданию робота с компактным и гибким "умом". Адаптивный метод является ключевым при решении задач, поставленных перед машиной. С его разработкой сделан важный шаг к созданию "думающего" робота вместо автомата, поведение которого полностью программируется заранее.
На пути к созданию машин, способных приспосабливаться к окружающей обстановке, имеется еще одно трудноопределимое препятствие - проблема создания искусственного зрения. Ни конструкторы, ни психологи, ни физиологи не знают, как подступиться к этой проблеме. Любое изображение - это миллионы единиц информации. Нужно каким-то образом свести их всего к нескольким информационным единицам. Научить ЭВМ распознавать самые разнообразные предметы - задача сегодня почти не разрешимая. Ведь обычная фотография распадается примерно на 25 млн. "информационных точек" и даже не столь четкое телевизионное изображение состоит не менее чем из 275 тыс. таких точек.
Работа над системами искусственного зрения будет продолжаться, но пройдут еще годы, прежде чем им удастся хотя бы приблизиться к элементарнейшим возможностям человеческого глаза. Тем временем будут совершенствоваться роботы, уже действующие в промышленности, в космосе, на дне океана, оперирующие с радиоактивными материалами. И, разумеется, машины будут продолжать "умнеть". Когда-нибудь автоматы возьмут на себя задачу совершенствования своих способностей, избавив от этой заботы людей. Не исключено, что искусственный разум настолько самоусовершенствуется, что выйдет даже из-под контроля человека.
На первый взгляд, глупо бить тревогу сейчас, когда до создания таких разумных машин еще очень далеко. Однако к этой проблеме надо подойти серьезно, чтобы не забыть об осторожности, когда приблизится опасный момент. Пока же они покорно выполняют задания в космосе, под водой, в быту, при испытаниях новой техники и во многих других случаях. Посмотрим, как это делается.
Будущее человечества тесно связано с космосом. Хотя усилия в деле освоения космоса, расширения сферы обитания человека предназначены главным образом для людей будущего, роботы для космических исследований приносят вполне осязаемую практическую пользу и в настоящее время. Развитие космонавтики создает предпосылки для новых научных открытий, для обнаружения новых явлений природы, так как научная аппаратура доставляется в ранее неисследованные области космического пространства, на Луну и планеты солнечной системы. Ценность таких открытий невозможно выразить в денежном исчислении, но они могут иметь огромное значение и влиять на судьбу всего человечества.
С развитием космонавтики появилось множество проектов космических роботов. Проекты тщательно разрабатывались, макетировались и исследовались. На рис. 11 изображен робот из этой серии, одна рука которого держит телевизионную камеру, а другая - снабжена схватом. Изменяя положение телекамеры по отношению к некоторому объекту, можно обеспечить всестороннее тщательное его изучение.
В яркой летописи полетов советских лунных роботов всемирно известным стало достижение автоматической станции "Луна-17" (1971 г.) (рис. 12) ("Техника - молодежи", 1971, № 1, с. 10).
"Луна-17" стартовала с Земли, вышла на окололунную орбиту, совершила мягкую посадку в районе Моря изобилия, взяла образец лунного грунта и с изумительной точностью доставила его на нашу планету, приземлившись в 80 км юго-восточнее города Джезказган.
Впервые в истории освоения космоса были осуществлены автоматический старт ракеты с другого небесного тела солнечной системы и выведение автомата на трассу возвращения к Земле. Точное выведение позволило обеспечить перелет возвращаемого аппарата на Землю без коррекций, по баллистической траектории, попадание аппарата в расчетный коридор входа в атмосферу и его посадку в заданном районе территории Советского Союза с высокой точностью. Лунный грунт был благополучно доставлен на Землю.
Наверное, на выставках многие видели, как работает оператор с радиоактивными изотопами. Он не подвергается риску облучения, так как действует с помощью механических рук. Точно так же без риска для себя ученые действовали на Луне. Только здесь "руки" протянулись на 400 тыс. километров. Электрический бур по команде с Земли углубился в лунный грунт и, не нарушив его структуры, взял образец. Затем "рука" упаковала образец грунта в контейнер возвращаемого аппарата и загерметизировала его.
Как видите, все это довольно сложные операции. И это только начало пути активно работающих автоматов, способных возвращаться на Землю. Принципы, заложенные в действия "Луны-17", позволяют нам протянуть "руки" в космос на десятки и сотни миллионов километров и проводить автоматические исследования на дальних планетах.
Широко применяются роботы для подводных исследований. Нет необходимости обсуждать вопрос о важности исследования океана и о перспективах разработки морских ресурсов для человечества, которое через некоторое время исчерпает ограниченные ресурсы суши. Океан явится тогда огромным резервом полезных ископаемых и средств к существованию. Большой интерес, проявляемый к тектоническим процессам и исследованиям малых форм рельефа дна океана, стимулирует развитие новых технических средств сбора научных данных, наиболее перспективные из которых глубоководные роботы-манипуляторы. Сбор образцов пород, отбуривание кернов, взятие проб грунта - вот перечень первостепенных работ, которые могут быть выполнены роботами.
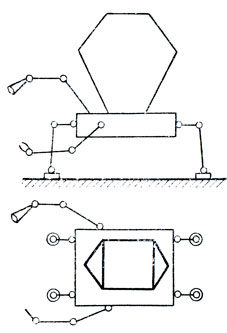
Рис. 11. Схема робота на шагающей платформе
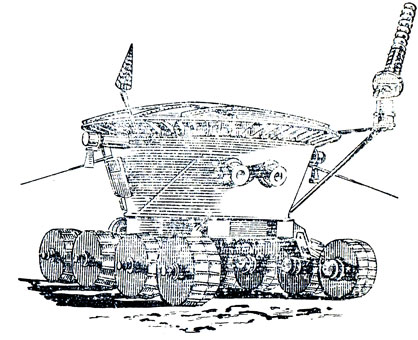
Рис. 12. Автоматическая станция 'Луна-17'
Кроме космоса и подводных исследований роботы нужны и в сравнительно прозаических условиях, например в быту.
Несмотря на наличие различных устройств и приспособлений, облегчающих труд домашних хозяек, еще очень далеко до комплексной автоматизации их труда. И здесь применение роботов представляет особый интерес, так как с ростом материального благосостояния общества становится все более острой проблема домработниц и уборщиц. Известны разработки нескольких проектов домашних роботов с автоматическим управлением. У японских специалистов такой робот имеет вид змеи на ножках; так, оказывается, удобнее автоматизировать работу по уборке квартиры, мытье посуды. Английские роботы-хозяйки имеют человекоподобный вид. Разрабатываются роботы-сиделки для больных, роботы-няньки для детей.
При испытаниях новых машин - сверхзвуковых самолетов, автомобилей, ракет - человек подвергается опасности. Если на его место посадить робота, который по размерам, форме, массе и некоторым другим свойствам соответствует человеческому телу, а также выполняет некоторые несложные движения, то можно экспериментировать смелее, не ставя под угрозу человеческую жизнь
Фирма "Альдерсон" в США уже много лет выпускает роботов-испытателей. Такой робот состоит из стального скелета, покрытого чехлами из пластмассы, которые имитируют мягкие ткани человеческого тела. Рост робота 1 м 85 см, масса около 90 кг. На него надевают рабочий комбинезон и ботинки. В литом алюминиевом черепе помещается программное устройство - приборы радиоуправления и измерительные приборы, отмечающие величину нагрузок, которым подвергаются роботы.
Все, о чем мы говорили, похоже на фантастику, но это уже действительность. Фантасты же устремляются еще дальше. В подтверждение этого мы познакомимся с тремя идеями в области роботостроения. Подобных идей много, но мы выбрали три. Первая относится к роботам заводов завтрашнего дня. Специалисты в области промышленной кибернетики считают, что заводы завтрашнего дня будут строить не на механических, а на кибернетических принципах.
Как же будет выглядеть этот завод? Да почти так же, как в романах писателей-фантастов. Между станками заснуют механические существа-роботы. Вряд ли они будут выглядеть металлическими красавцами, напоминающими человека. Все будет гораздо проще: небольшая тележка на колесах с двумя или одним манипулятором. Сейчас бесполезно предполагать, сколько у нее будет "пальцев" - три или пять, покажет время и необходимость. Но одно можно сказать точно: тележка сможет двигаться во всех направлениях, во всех плоскостях.
Заводом-автоматом будет руководить АСУ - автоматизированная система управления. Она-то и станет следить за работой станков и деятельностью роботов. Она же будет распоряжаться, когда линиям или отдельным станкам следует переходить на выпуск новой продукции. Эта же вычислительная машина составит программы для всех станков и роботов.
Таким образом, основными "производителями" станут станки с программным управлением и роботы. Но это, так сказать, нижняя часть предприятия.
Одно из основных звеньев верхнего, управленческого, ряда - автоматизированная система проектирования. По-видимому, до конца нашего века машинам все же не удастся полностью отстранить человека от проектирования. Но это и не так уж важно для завода-автомата. Ведь несколько специалистов - десять-пятнадцать - все-таки останутся на таких предприятиях. Возможно, проектирование станет чуть ли не единственным участком, где они будут заняты.
Итак, новый вид продукции спроектирован ЭВМ. Автоматически разработанные конструкции передаются на другую машину, которая отвечает за управление. Чтобы производить сразу несколько видов продукции, детали нужно послать на сборочные линии в определенном порядке. Вот за всем этим и проследит управляющая машина, точнее, она организует выпуск изделий по предварительным заказам.
Вся производственная информация будет поступать на третью машину. Ее обязанности - расчет программы для каждого станка и каждого робота, подбор необходимых материалов и инструментов. Если чего-то на производстве не хватает, третья ЭВМ, отвечающая за управление, сама выдаст заказ на завод-поставщик или на центральную базу снабжения. Кстати, та же машина отправит в ремонт вышедших из строя роботов, заменив их на время другими, со склада.
Когда все сырье, материалы, инструменты будут получены и доставлены в цехи, машина, отвечающая за производство, включит механизмы. Один за другим начнут работать станки, а роботы будут послушно передавать детали с одной операции на другую. Заготовки пойдут от станка к станку, из цеха в цех, приобретая все более законченный вид. Наконец, роботы сборщики соединят отдельные узлы и детали.
Готовая продукция попадает на контролирующие установки, которыми будет распоряжаться еще одна ЭВМ. Контроль качества - дело очень сложное. Ведь современная машиностроительная продукция состоит из сотен и тысяч деталей, неполадки в некоторых из них могут сказаться не сразу. Вполне возможно, что самые ответственные узлы придется проверять еще до окончательной их сборки. Но это нисколько не изменит структуру завода завтрашнего дня. Испытания тоже будут программноуправляемыми. На одном и том же стенде пройдут проверку различные агрегаты. Обслуживающий робот в каждом случае поступит по-особому, чтобы обнаружить неполадки, свойственные лишь данному узлу.
Другая идея в роботостроении - создание усилителей механической мощности человека. Наше тело способно выполнять от 10 до 20 различных контролируемых движений сразу, а при управлении механизмами мы можем совершать одновременно не более двух движений. Основная причина такого различия состоит в том, что человеку приходится приспосабливаться к неестественному для него способу работы, присущему почти всем машинам. Вот и возникла идея создать усилитель механической мощности человека. Сохраняя свободу движений человека, усилитель мощности значительно уменьшит потребность адаптации человека, позволит ему работать непринужденно. Усилитель - механизм сам по себе очень сложный и дорогой - выгоден там, где нет подъемных кранов и транспортеров с подъемными платформами или где эти машины нельзя использовать. Человек с механическими мускулами сможет переносить тяжелые грузы в необычной обстановке - в тайге, горах, заболоченных местах. В дальнейшем специалисты собираются сделать усилитель автоматическим, т. е. превратить его в человекоподобного робота (рис. 13).
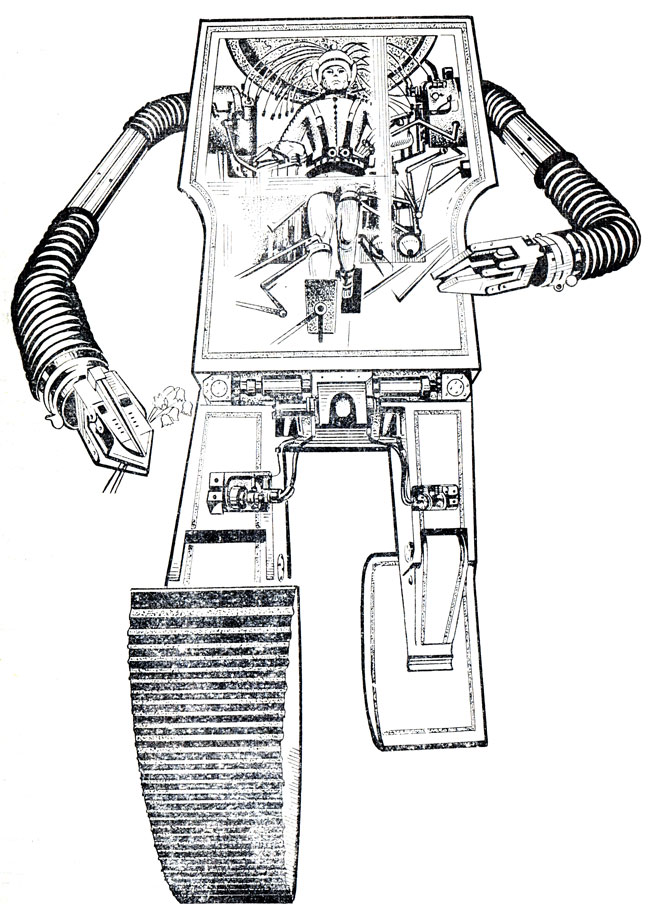
Рис. 13. Человекоподобный робот
Казалось бы, куда уж дальше этого проекта. Но есть совершенно безграничная область для фантазии роботостроителей - мега-мир. В наше время, когда человечество планомерно осваивает ближайшую соседку Земли - Луну, фантасты устремились к звездам. В одной нашей Галактике больше сотни миллиардов солнц, не исключено, что у многих есть планеты.
Из всех космических грез самая распространенная и самая заманчивая - мечта о встрече с братьями по разуму, с иными цивилизациями, желательно, с более развитыми, опередившими нас, способными передать нам секреты еще не сделанных открытий. Однако даже в солнечной системе нет планеты, где человек остался бы в живых, сняв скафандр.
При существующих темпах развития техники человечество может выйти за пределы солнечной системы и устремиться к ближайшим звездам. Но даже до самой близкой из них - Проксима Центавра - расстояние около 4,5 млрд. световых лет. Это значит, что до Проксима Центавра со скоростью, близкой к скорости света, нужно лететь десятки лет. А чтобы добраться до других звезд нашей Галактики, нужны тысячелетия!
Исследования мегамира связаны со сверхдальними космическими полетами. Для таких полетов со скоростями, близкими к световой, потребуется время, превышающее длительность человеческой жизни. Спрашивается: есть ли у человечества способ исследовать мегамир? Да, имеется. Это создание кибернетической системы - робота, управляемого искусственным интеллектом и рассчитанного на длительное функционирование в мегамире. Такой робот может достичь самых дальних районов Вселенной.
Рис. 14. Структурная схема робота для мегамира
Неизвестность сред, в которых придется функционировать системе, непредвиденность и сложность конкретных задач, которые придется ей решать, исключают возможность построения системы управления робота с заданным алгоритмом, сколь бы широкий круг задач в нем не был предусмотрен. Управление системой можно будет реализовать только на принципах эвристического программирования, моделирующего творческое мышление человека. Система должна быть саморазвивающейся не только в части построения новых анализаторов сред, двигателей, внутренней структуры, но и в части саморазвития искусственного интеллекта (рис. 14). Искусственный интеллект должен уметь решать такие частные, но важные подпроблемы, как формирование языка, выработка понятий, распознавание образов, построение гипотез, выбор критериев успеха, самообучение и др.
Подобно человеку, автономная система робота-астронавта с искусственным интеллектом не сможет моделировать реальный мир, если не пройдет обучения такому моделированию в известных человечеству средах и если переход от известных сред к неизвестным не будет для этой системы постепенным.
Проблема создания автономно функционирующего робота-астронавта, управляемого искусственным интеллектом и предназначенного для сбора полезной человечеству информации в мегамире, сегодня стоит на рубеже научных исследований дальнего поиска.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'