Конструктивные особенности роботов
Простое и сложное решение
Роботы входят в нашу жизнь. Мы уже говорили о применении на производстве "интегральных роботов", об огромных масштабах научных исследований в области создания роботов для полетов в космос и на другие планеты Вселенной.
Очень многие схемы, описанные в книге, можно смонтировать в моделях самых разнообразных роботов (схемы "зрения", "слуха", "речи" и т. д.).
Модель простейшего человекоподобного робота с программным управлением показана на рис. 124. Высота робота около 70 см, и, хотя вид у него внушительный, он сделан из тонкого картона, покрыт металлической бумагой и покрашен серебристо-голубой краской.
В ступнях робота размещаются батарейки карманного фонаря, моторчики, перемещающие робота, и колеса с резиновыми шинками. Как сконструировать ноги робота, чтобы он шагал и был устойчивым, поясняет рис. 125. Программу действий робота придумайте сами.
При конструировании больших роботов трудно сделать модель устойчивой. Поясним отдельные конструктивные решения в таком роботе на примере модели, сделанной щелковскими юными техниками.
На рис. 126 дан чертеж этого робота в профиль и указаны основные размеры конструкции. Ступни ног робота сделаны очень большими, чтобы увеличить устойчивость модели.
Ноги робота (рис. 127) с верхней горизонтальной платформой свободно отсоединяются от туловища. В массивных ступнях модели находятся аккумуляторы, а за аккумуляторами в обеих ступнях - электромеханизмы, приводящие в движение задние колеса каждой ступни. Всего в каждой ступне имеется по три металлических колеса с жесткими резиновыми шинками. В средней части ноги проходят металлические тяги, благодаря которым достигается устойчивость модели во время движения. Свободное пространство в ногах заполняется различными блоками электрорадиооборудования модели, доступ к которым возможен через люки под коленными дисками робота. Туловище робота устанавливается на горизонтальную платформу и крепится замками. На платформе находятся реле и электромеханические автоматы, управляющие мотором движения ног. При ходьбе ноги робота попеременно шагают, не отрываясь от пола (катятся по полу).
Рис. 124. Простейший робот
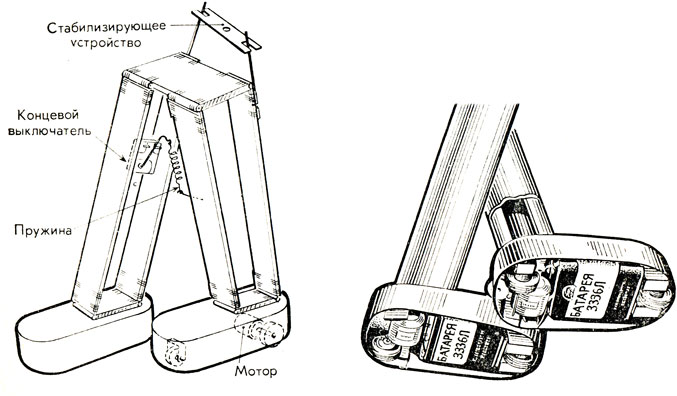
Рис. 125. Ноги робота
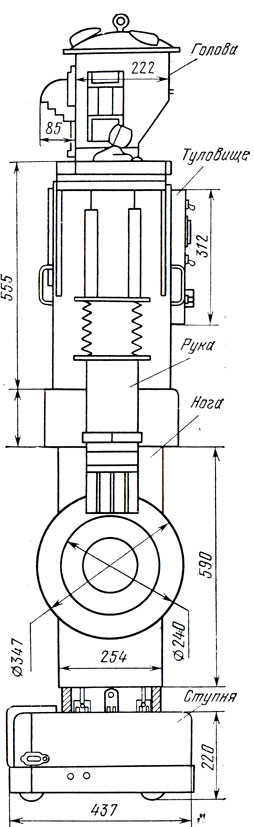
Рис. 126. Чертеж робота
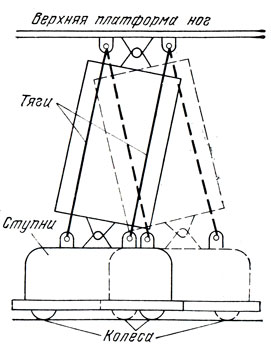
Рис. 127. Ноги робота
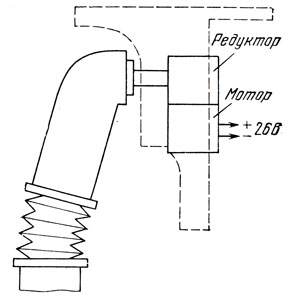
Рис. 128. Механизм подъема руки
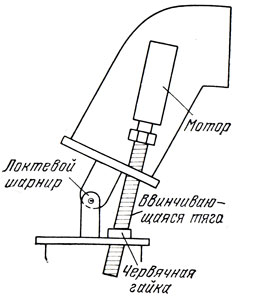
Рис. 129. Локтевой сустав
Такая конструкция ног позволяет роботу не только устойчиво ходить, но даже "плясать" под музыку.
Как осуществляется подъем рук робота с помощью мощного электромеханизма с редуктором, поясняет рис. 128. На рис. 129 показана конструкция локтевого сустава модели.
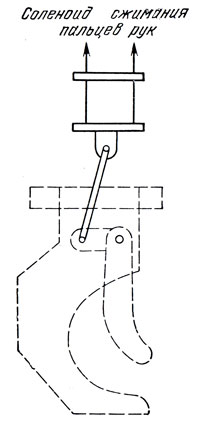
Когда робот берет в руку предметы, они прижимаются большим пальцем руки, поворачивающимся с помощью электромагнитного соленоида (рис. 130).
Голова робота также поворачивается с помощью электромотора с редуктором. Всюду в модели установлены концевые выключатели, ограничивающие пределы перемещения ног, рук и головы.
Мощности электромеханизмов, приводящих робот в движение, зависят от размеров разрабатываемой модели. Если робот небольшой, например высотой 50-60 см, и корпус его сделан из легкого материала (из клееного картона или тонкой фанеры), то он сможет шагать с помощью очень небольших электродвигателей с редукторами. Такие двигатели (типа ДП-10) используются для привода в движение моделей игрушечных автомашин-вездеходов. Для питания электродвигателей ДП-10 в модели достаточно установить две или четыре батарейки КБС-Л-0,5. Однако если робот имеет высоту более 1,5 м, то его корпус приходится делать из прочных материалов (например, алюминия, стали, стеклопластика). В этом случае в качестве приводных механизмов используют готовые электродвигатели с редукторами, применяющиеся для управления различными устройствами в современных автомобилях, самолетах и т. п. В ступнях ног робота установлены, например, так называемые рулевые машинки от старого автопилота. Для подъема рук можно использовать самолетные электромеханизмы управления триммерами, закрылками и т. п. Соленоиды, сжимающие пальцы рук, можно сделать самим.
Теперь рассмотрим конструкции нескольких отечественных роботов - участников Всесоюзных конкурсов роботов, проводимых журналом "Техника - молодежи", и модели, представленные на ВДНХ СССР.
Попытки создать самостоятельно механизмы движения робота, подъема его рук и сгибания рук в локтях потребуют от роботостроителя огромных затрат времени на конструирование редукторов к этим механизмам. Вряд ли стоит это делать, так как все необходимое для таких целей создано промышленностью в виде компактных и надежных типовых электромеханизмов для различных видов техники.
Pис. 130. Палец руки робота
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'