Глава 2. Шасси, двигатели и источник питания
Программа Бастер посвящена электронной системе управления роботом и не касается механической стороны дела. Так, я не пытался создать шагающий робот или робот, обладающий механическими руками и пальцами. И то, и другое практически увеличило бы вдвое сложность программы и соответственно ее стоимость, что в свою очередь поставило бы под угрозу возможность осуществления всего проекта в целом.
В книге также отсутствует описание таких хорошо известных по научно-фантастической литературе атрибутов роботов, как корпус из блестящего металла и голова из прозрачной пластмассы, внутри которой жужжат моторчики и вспыхивают маленькие лампочки.
Подобные эффекты могут только отвлечь внимание от более тонких особенностей построения робота, которые имеют действительно важное значение для робототехники. Бастер - система механически простая, но электроника его достаточно насыщена, причем сложность электроники с лихвой компенсирует примитивность механического устройства, которое описано в этой главе.
Шасси
К шасси предъявляется единственное требование - это должна быть четырехколесная тележка, способная разворачиваться и нести на себе аккумуляторы, двигатели, электронику и т. п. общим весом порядка 20 кг. При желании вы можете изготовить тележку самостоятельно, но не приступайте к этому до того, как изучите приведенные фотографии и рисунки; они дают представление о том, какие устройства понадобится разместить на шасси в дальнейшем (обратите особое внимание на гл. 5, 10 и 15).
Чтобы свести механическую работу к минимуму, я решил использовать готовое шасси-детский автомобиль с питанием от аккумулятора. Такие небольшие автомобили обычно можно приобрести в магазине игрушек по цене 20-35 долл. Для сокращения расходов я купил его при распродаже товаров по сниженным ценам. К счастью, единственной его неисправностью был сломанный тумблер включения, что не имело значения, так как этот тумблер в дальнейшем нигде не используется.
Шасси должно иметь два привода: для движения вперед - назад и для поворота. Первый из них вместе с редуктором уже имелись, так что мне пришлось лишь подобрать второй двигатель с редуктором для привода механизма поворота. Эта проблема также была решена на распродаже: я купил за гроши другой автомобиль с разбитым крылом, в котором был требуемый привод. Конструктор-любитель всегда может воспользоваться аналогичной возможностью для приобретения шасси и привода.
Способ крепления привода поворота к поворотной колонке и шасси определяется видом последнего. На рис. 2.1. приведен один из возможных способов. Единственное требование состоит в том, чтобы редуктор был надежно закреплен.
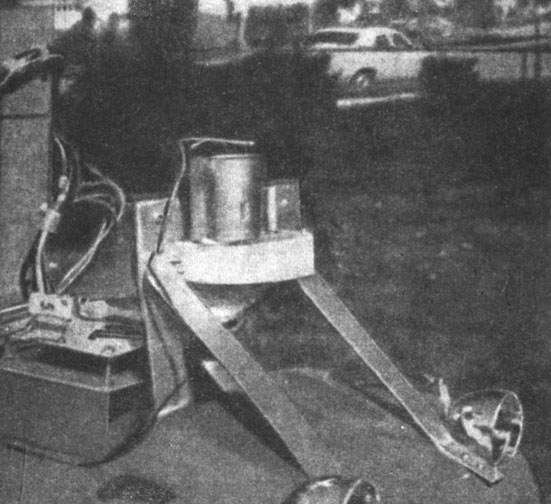
Рис. 2.1. Возможная схема установки привода поворота
Стойка печатных плат
Для реализации всей системы управления требуется порядка 30 печатных плат. Разумеется, они включаются в систему по одной или по две сразу по мере ее развития, однако
целесообразно в самом начале предусмотреть необходимое место для установки всего набора печатных плат.
На рис. 2.2 и 2.3 приведена предлагаемая конструкция стойки. С целью снижения расходов она изготовлена из дерева, а не из дюраля. Я взял два куска стандартной сосновой доски размером 25 X 200 мм и прорезал в ней пазы на расстоянии 19 мм один от другого. Таким образом, печатные платы размером 100 X 200 мм, на которых собирается вся электроника, можно задвигать в стойку с обеих сторон. Для установки 30 плат длиной 100 мм достаточно 15 пазов длиной 200 мм.
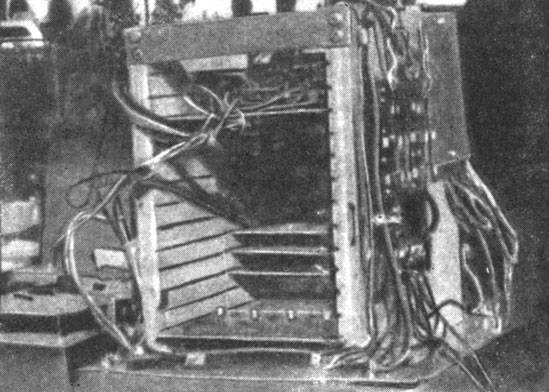
Рис. 2.2. Предлагаемая стойка для печатных плат
Рис. 2.3. Детали и размеры стойки. Каждый паз глубиной 6 мм; расстояние между внутренними поверхностями пазов 155 мм
При достаточных финансовых возможностях можно пользоваться разъемами, но значительно дешевле припаивать провода, соединяющие платы к контактным площадкам, предусмотренным на внешних краях плат.
Требования к источнику питания
Система питания Бастера состоит из нескольких шестивольтовых аккумуляторов, регуляторов напряжения и устройства для внешней подзарядки аккумуляторов. Требования к аккумуляторам определяются напряжением питания двигателей и потребляемым током. Другими потребителями энергии являются интегральные микросхемы, усилители и реле. Довольно быстро я установил, что никель-кадмиевые аккумуляторы, входившие в комплект купленного мной автомобиля, не подходили для питания Бастера.
Один из недостатков этих аккумуляторов состоит в том, что скорость их подзарядки намного меньше нормальной скорости их разрядки. Это означает, что Бастер будет вынужден тратить основное время на подзарядку аккумуляторов, а не на движение по комнате. Другой недостаток состоит в том, что напряжение на выходе очень быстро падает после того, как аккумулятор разрядится до определенного предела. В большинстве случаев практического применения таких аккумуляторов это, возможно, является преимуществом, но в системе Бастер III это оказывается серьезным недостатком.
С другой стороны, свинцовые аккумуляторы можно быстро подзаряжать, а их напряжение в процессе разрядки снижается плавно на протяжении длительного периода времени. По этим соображениям я предпочел свинцовые аккумуляторы никель-кадмиевым.
Шестивольтовые двигатели, которые стоят в приводах движения и поворота, имеют ток холостого хода порядка 1 А и пусковой ток ~10 А. Аккумуляторы должны быть в состоянии дать пиковый ток 20 А (в случае, когда оба двигателя включаются одновременно) и поддерживать средний ток порядка 5 А или около этого.
В данном случае я определил параметры двигателей экспериментально. Для определения тока холостого хода я подключил один из двигателей к хорошему источнику напряжения 6 В и измерил потребляемый ток с помощью амперметра постоянного тока. Пусковой ток я определил, зажав выходной вал двигателя с помощью гаечного ключа.
Итак, аккумуляторы, предназначенные для питания двух двигателей постоянного тока, должны быть свинцовыми с напряжением 6 В, током разряда не менее 20 А и емкостью порядка 8 А-ч. Этим требованиям отлично удовлетворяют аккумуляторы от мотоциклов, которые к тому же сравнительно невелики по размеру и весу.
Интегральные микросхемы и некоторые реле не могут быть запитаны от этого источника. Например, напряжение питания микросхем должно быть в пределах 4,5-5,5 В, т. е. необходим дополнительный стабилизатор напряжения на 5 В. К сожалению, такой регулятор не может нормально работать от источника на 6 В, поэтому я был вынужден соединить последовательно два мотоциклетных аккумулятора и получил источник напряжения на 12 В со средней точкой. Двигатели запитываются от половинного напряжения со средней точки, а полное напряжение 12 В поступает на стабилизаторы и используется для питания некоторых усилителей и реле (рис. 2.4).
Рис. 2.4. Принципиальная схема источника питания. SLO -медленно срабатывающий плавкий предохранитель
Большинство из широко распространенных стабилизаторов на 5 В рассчитаны на максимальный ток 1 А. Большинство же микросхем, используемых в системе управления, - это микросхемы транзисторно-транзисторной логики, которые отличаются сравнительно большим потреблением тока. Поэтому имеющийся резерв тока в 1 А при не слишком большом числе микросхем уже исчерпывается. Оказывается, что для каждого из трех этапов реализации всей системы достаточно одного стабилизатора LM309. Один стабилизатор требуется с самого начала для подсистемы Бастер I, по мере необходимости подключается два остальных.
Так как корпус стабилизатора LM309 соединен с общей шиной, все три могут быть установлены на общей пластине из дюраля размером 100 X 150 мм. Если придерживаться этих размеров, плату со стабилизаторами можно вдвинуть в одну из нижних позиций стойки.
Как показано на рис. 2.4, каждая выходная шина источника питания имеет плавкий предохранитель. Патроны для предохранителей желательно установить в легко доступном месте, например на боковой стороне стойки.
Диод на 10 А, расположенный между положительным выводом аккумуляторов и разъемом для подзарядки, потребуется позднее при создании подсистемы Бастер II, однако в любом случае место для него следует предусмотреть в самом начале.
Целесообразно также предусмотреть на задней поверхности стойки ряд контактных площадок и вывести на них выходные шины источника питания. В дальнейшем это облегчит разводку питания на платы стойки.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'