Глава 5. Логика управления поворотом
Система управления поворотом Бастера была описана в гл. 3. Передние колеса вращаются налево или направо в зависимости от сигнала +5 В, поданного на вход соответствующего усилителя реле поворота. При таком управлении напряжение на привод поворота подается все время пока поступает управляющий сигнал, и колеса остаются в фиксированном положении пока оператор не подаст следующую команду поворота.
При подаче сигнала +5 В, например на вход усилителя реле правого поворота, реле включается и подает на двигатель поворота напряжение соответствующей полярности. Остановите вращение, убрав входной сигнал, и верните колеса в среднее положение, подав +5 В на вход усилителя реле левого поворота.
Схема управления поворотом, которая описывается в этой главе, является первым блоком автоматического управления, который входит в систему Бастер I. Эта схема выполняет два важных действия: автоматически поворачивает колеса на нужный угол и автоматически возвращает их в среднее положение после снятия управляющего сигнала.
Вместо того чтобы нажимать на кнопку до тех пор, пока колеса не повернутся на желаемый угол, вы просто включаете тумблер, задающий соответствующий угол и направление поворота. Схема вращает колеса до тех пор, пока не будет достигнут заданный угол. Другими словами, отпадает необходимость непосредственно наблюдать за выполнением поворота - при достижении заданного угла вращение автоматически прекращается, хотя управляющий тумблер по-прежнему включен. Это свойство, между прочим, является первым шагом к реализации системы дистанционного управления, которая дает возможность управлять поворотом Бастера, не видя его.
Наконец, схема автоматически возвращает механизм поворота в исходное положение, когда команда поворота снимается; оператор освобождается от необходимости поворачивать колеса обратно путем подачи отдельного сигнала.
В качестве примера рассмотрим задачу, которую может решить схема управления поворотом. Пусть Бастер движется вперед, и вы хотите, чтобы он сделал крутой поворот вправо. Для этого вы должны лишь включить тумблер "круто вправо". При этом колеса поворачиваются до тех пор, пока не будет достигнут угол "круто вправо". Колеса будут оставаться в этом положении до тех пор, пока оператор не отключит тумблер "круто вправо". В этот момент схема вернет колеса в среднее положение, соответствующее прямолинейному движению.
В этой главе описываются два варианта схемы управления поворотом. Основные принципы работы обоих вариантов одни и те же, но вариант 2 имеет некоторые усовершенствования, которые улучшают работу всей системы. Эти различия будут рассмотрены в дальнейшем.
Общие принципы работы
Упрощенная блок-схема всей системы управления поворотом Бастера I приведена на рис. 5.1. Выходной блок и привод поворота являются частями упрощенной системы управления поворотом, описанной в гл. 3. Новыми блоками системы управления являются логическая плата управления поворотом, схема обработки сигналов с датчиков положения и усовершенствованный вариант панели управления.
Рис. 5.1. Общая блок-схема системы управления поворотом Бастера. * - только во втором варианте управления поворотом
Усовершенствованная панель управления состоит из четырех переключателей, каждому из которых соответствуют определенное направление и угол поворота. Тумблеры помечены SR, HR, SL и HL, что соответствует НАПРАВО, КРУТО ВПРАВО, НАЛЕВО, КРУТО ВЛЕВО (табл, 5.1). В дальнейшем эта панель управления будет заменена на блок дешифрации команд управления движением и поворотом (гл. 6).
Таблица 5.1. Название контактных пар и сигналов
В качестве датчиков угла поворота передних колес Бастера используются магнитоуправляемые контакты. Магнит закреплен на оси привода поворота и движется над контактами, замыкая их поочередно. Если оператор включает команду "круто вправо", двигатель поворота будет вращаться направо до тех пор, пока магнит не замкнет контакты "круто вправо" (рис. 5.2).
Рис. 5.2. Возможная реализация блока магнитоуправляемых контактов
Всего имеется по крайней мере пять пар контактов: по одной на каждый поворот и одна пара для среднего положения. В варианте 2 имеется две дополнительные пары контактов, которые служат для ограничения угла поворота в каждую сторону. Названия контактных пар и сигналов, которые будут использоваться в этой главе, приведены в табл. 5.1.
Логическая плата управления поворотом вырабатывает сигналы MR или ML, которые поступают на усилители мощности двигателя поворота. Например, при включении тумблера "круто вправо" плата выдает сигнал MR, который приводит к повороту колес направо. В тот момент, когда магнит, закрепленный на оси двигателя, окажется над контактной парой "круто вправо", она замкнется, и этот сигнал отключит движение направо. Механизм поворота останется в этом положении до тех пор, пока на панели управления будет включен тумблер "круто вправо". Для возврата передних колес в среднее положение достаточно выключить тумблер. При этом плата управления поворотом выдаст сигнал ML, в результате чего колеса будут поворачиваться налево до тех пор, пока магнит не замкнет контакты Sc. Тем самым система управления поворотом возвращается в исходное состояние.
Разумеется, можно задать другой угол поворота и без того, чтобы предварительно установить колеса в среднее положение. Однако в варианте 1 имеется одно ограничение: в каждый момент может быть включено не более одного тумблера. Одновременное включение двух или более тумблеров приводит логику в неопределенное состояние, что почти всегда сопровождается одновременным включением обоих реле поворота, в результате чего закорачивается цепь питания двигателя поворота. Эта опасность устраняется во втором варианте системы управления поворотом, в котором двигатель поворота автоматически останавливается при одновременном включении более одного тумблера.
Система управления поворотом оказывается наиболее капризной из всех систем Бастер I. Я думаю, что ее уязвимость в значительной степени определяется тем, что это единственная электромеханическая система с обратной связью, которая должна работать почти со 100%-ной надежностью. Подобные системы достаточно каверзны, а необходимость высокой надежности только усложняет задачу.
Для системы Бастер I я выполнил вначале систему управления поворотом в первом варианте. Она до сих пор надежно работает в одной из моделей. Но затем я почти полностью отказался от этого подхода, так как с ним было связано много трудностей.
Тем не менее я был убежден, что разработанная мною на бумаге схема должна работать и на практике, и эта вера в конце концов оправдалась. Хотя второй вариант системы управления не устраняет основные трудности, он значительно упрощает их преодоление.
В одном из следующих разделов, посвященном деталям конструирования, описываются конкретные трудности и способы их разрешения.
Логика управления поворотом
Оба варианта системы управления построены по одной и той же схеме. Фактически отличие второго варианта состоит в том, что выходной каскад содержит схемы, исключающие состояния короткого замыкания, которые могут возникнуть во время проверки и наладки системы управления поворотом. Таким образом, полное понимание работы первого варианта системы управления дает 90%-ное понимание второго варианта.
Логика управления поворотом, вариант 1
Заметим, что логическая плата управления вырабатывает только два выходных сигнала - МR и ML. При отсутствии команды на вращение двигателя поворота - на обоих выходах низкое напряжение, а при необходимости повернуть передние колеса - на одном из них появляется высокий потенциал. Однако высокие потенциалы никогда не должны появляться на обоих выходах одновременно.
Логическая плата должна выдавать сигнал MR всякий раз, когда оператор задает команду правого поворота - НАПРАВО или КРУТО ВПРАВО. Этот сигнал должен оставаться высоким до тех пор, пока не замкнется соответствующая пара контактов. В форме логического уравнения это выглядит следующим образом:
MR = GSR (SSR) + GHR (SHR).
Таким образом, сигнал на выходе MR появляется всякий раз, когда задана команда GSR или GHR и соответствующие контакты не замкнуты. Например, если оператор задает команду НАПРАВО, GSR = 1; и если контакты еще не замкнуты, SSR = 1. При этом Mr равно единице, и логическая плата выдает сигнал, поворачивающий передние колеса вправо. В тот момент, когда магнит на оси двигателя поворота замыкает контакты, SSR = 0 и логическое уравнение показывает, что MR становится равным нулю. В результате этого привод поворота останавливается в положении НАПРАВО. Аналогично рассматривается и часть уравнения, соответствующая крутому повороту вправо; для поворота налево уравнение составляется аналогично.
Однако логическое уравнение не полно, так как в нем не учтена необходимость автоматически возвращать механизм поворота в среднее положение при выключении тумблера на панели управления. Другими словами, сигнал на выходе Mr должен появляться и в тех случаях, когда колеса были повернуты влево, а команда левого поворота выключается. Это учитывается введением в уравнение третьего слагаемого:
где CR - команда возврата колес из левого поворота в среднее положение. Эта команда вырабатывается логической схемой. Таким образом, MR должно быть равным 1, когда замкнута одна из двух пар левых контактов (это указывает на то, что колеса повернуты влево) и команда, задавшая этот поворот, выключается. Это можно записать в виде CR = (SHL + SSL) GHLGSL. Другими словами, СR становится равным 1 всякий раз, когда одна из пар левых контактов замкнута, но с панели управления не идет команда поворота налево.
Предыдущее уравнение для СR должно включать член, который останавливает вращение в момент, когда закрепленный на оси двигателя по-ворота магнит возвращается в среднее положение. Поэтому полное уравнение для CR будет иметь вид
где SC = 1, если механизм поворота не находится в среднем положении.
Подставляя это выражение для CR в уравнение для MR, получаем полное логическое уравнение для MR в первом варианте системы управления поворотом:
Логическое уравнение для сигнала ML имеет аналогичный вид:
Логическая схема, вычисляющая значение MR, приведена на рис. 5.3, а на рис. 5.4 приведена полная схема платы логики в первом варианте системы управления поворотом.
Рис. 5.3. Логическая схема (цепь) формирования сигнала MR в варианте 1
Рис. 5.4. Схема логической платы управления поворотом в варианте 1. Резисторы R1- R4 - 4,7 кОм, 0,5 Вт: ИС1 - 2-4И-НЕ 7420, ИС2, 3-4-2И-НЕ 7400, ИС4 - 3-3И-НЕ 7410
Логика управления поворотом, вариант 2
Во втором варианте используется несколько усовершенствованная плата управления поворотом первого варианта. Что касается принципов работы, единственная разница между двумя вариантами состоит в том, что во втором варианте предусматривается прекращение поворота колес в двух случаях сбоев.
Один неприятный сбой в первом варианте системы управления возникает, когда двигатель поворота проскакивает все контакты и упирается в одно из ограничений справа или слева. Вариант 2 не решает проблемы попадания в неопределенное состояние, однако в нем используются дополнительные контакты, с помощью которых двигатель останавливается, если он проскочил все группы контактов. Из этого состояния блокировки система выводится путем подачи команды поворота, которая выводит механизм поворота из крайнего положения.
Другой сбой возникает при одновременной подаче команд правого и левого поворота. При этом включаются оба реле поворота, что приводит к короткому замыканию цепи питания двигателя. Во втором варианте предусмотрено выключение двигателя в таких ситуациях, что полностью исключает возможность короткого замыкания. В этом случае блокировка снимается при выключении одной из противоречивых команд или обеих.
Второй вариант системы управления поворотом не очень отличается от первого варианта. Фактически во втором варианте используются две дополнительные пары контактов в блоке обратной связи (табл. 5.1); печатная плата также несколько изменена (рис. 5.5).
Уравнения для MR и AL такие же, как в варианте 1, но они включают дополнительные члены с инверсией:
Логическая схема управления поворотом во втором варианте показана на рис. 5.5.
Рис. 5.5. Схема логической платы управления поворотом в варианте 2. Резисторы R1-Я5-4.7 кОм, 0,5 Вт; ИС1 - 2-4И-НЕ 7420, ИС2, 3-4-2И-НЕ 7400, ИС4, 5 -3-3И-НЕ 7410
Детали механического конструирования
Система обратной связи поворота показана на рис. 5.6. Механическая конструкция обоих вариантов отличается только двумя парами ограничивающих контактов, добавленных для работы по варианту 2.
Магнит можно закрепить на оси двигателя поворота любым удобным способом. Я воспользовался дюралевым швеллером, отрезанным от куска заготовки. При вращении двигателя поворота закрепленный на его оси магнит движется поверх магнитоуправляемых контактов.
Я решил закрепить датчики контакта на готовой плате, в которой заранее были высверлены отверстия. Этот вариант привлек меня возможностью легко изменять положения датчиков в процессе окончательной наладки. Плата была закреплена на шасси с помощью самодельных алюминиевых уголков. Возможен любой способ крепления при условии, что датчики расположены на расстоянии 20-25 мм от нижней поверхности швеллера, на котором закреплен магнит.
Из рис. 5.6 видно, что контактные датчики расположены по радиусам окружности, описываемой вращающимся магнитом. Если используются датчики предельных углов поворота, то для определения их расположения вал двигателя вручную поворачивается до предела вправо и влево, после чего помечаются соответствующие места на плате. Для установки датчика среднего положения механизма поворота передние колеса выравнивают, после чего датчик устанавливается прямо под магнитом.
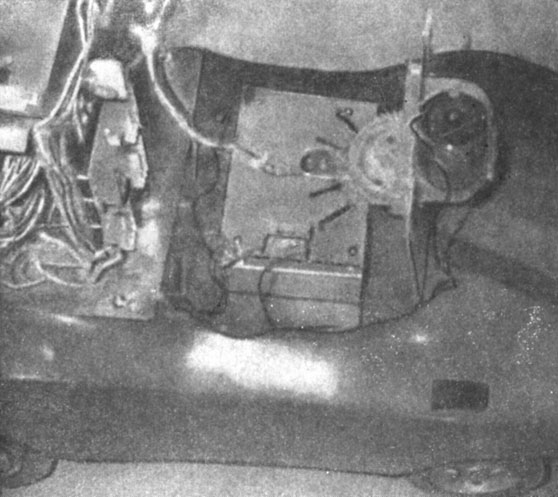
Рис. 5.6. Система обратной связи поворота (вариант 1)
Датчики поворотов размещаются под любым углом. В качестве начального приближения я расположил датчики малого поворота под углом, равным одной трети, а датчики крутого поворота под углом в две трети максимального.
Такое начальное расположение датчиков оказалось весьма удачным, так что во время окончательной наладки не потребовалось никакой юстировки. У автомобиля, который я использовал, предельные углы поворота направо и налево составляли 75°. Таким образом, датчики малого поворота останавливают колеса под углом 25-30°, а угол крутого поворота составляет 50-60°.
Система поворота доставила мне много хлопот. Логическая плата управления работала нормально, но двигатель поворота, крепление магнита и сам магнит, а также контактные датчики создавали немалые трудности.
Первая проблема, с которой я столкнулся, состояла в том, что при полностью заряженных батареях двигатель поворота вращался слишком быстро. Магнит стремился проскочить требуемое положение, в результате чего логика попадала в неопределенное состояние, а колеса поворачивались на предельный угол. Без датчиков крайнего положения выход механизма поворота на предельный угол делает систему полностью неработоспособной. Датчики предельного положения избавляют от этой неприятности, но они не исключают перерегулирования при полностью заряженных аккумуляторах.
Рис. 5.7. Усовершенствованная панель управления: а - схема; б - внешний вид и расположение тумблеров. S1 - переключатель с одной парой контактов; S2, 5, 6 -кнопки с нормально разомкнутыми кон-тактами; S7-S10-переключатели с двумя парами контактов (показаны в выключенном положении-вниз)
Для ликвидации перерегулирования я мог бы, конечно, применить какой-либо вариант более сложного управления, но я хотел, чтобы электроника была как можно более простой и экономичной. После рассмотрения нескольких вариантов я решил установить последовательно с двигателем сопротивление. Я рассчитывал таким путем замедлить поворот, чтобы предоставить реле поворота больше времени на срабатывание в ответ на сигналы от соответствующей контактной пары.
Однако сопротивление обмоток двигателя поворота оказалось около 10 Ом, и случилось так, что в это время в моей мастерской не нашлось мощного сопротивления такого порядка. Это оказалось счастливым обстоятельством, так как навело меня на мысль поставить последовательно с двигателем кусок нихромовой проволоки длиной 15 см. "Холодное" сопротивление этой проволоки составляло ~2 Ом, и оно замедляло поворот. Постоянное сопротивление, которое я хотел использовать, было бы только временным решением проблемы, так как при низком напряжении аккумулятора двигатель, по-видимому, совсем бы остановился. При использовании нихромовой проволоки этого не происходит. Проволока фактически работает подобно пропорциональному регулятору, который поддерживает практически постоянную скорость двигателя независимо от напряжения питания. Это обусловлено тем, что при большем напряжении питания проволока сильнее нагревается, а ее возросшее сопротивление замедляет двигатель. При низком напряжении питания провод нагревается слабо и на двигатель приходится большая часть напряжения питания. Другими словами, двигатель поворота вращается примерно с постоянной скоростью независимо от степени заряда аккумулятора.
Как известно, "голь на выдумки хитра", но не часто необходимость приводит к столь большой удаче, как в этом случае. В конце концов я решил намотать нихромовую проволоку вокруг 10-ваттного сопротивления номиналом 4,7 Ом, соединив их параллельно. Этот прием ограничивает горячее сопротивление на уровне ~4,5 Ом.
Вторая трудность управления системой поворота состояла в магните. Сначала я установил один из тех магнитов, которые продаются в универмагах и магазинах канцелярских товаров в виде магнитных пружинных кнопок и держателей для бумаг. Оказалось, что этот магнит недостаточно силен для надежного замыкания контактов. Тогда я попробовал применить магнит несколько большего размера, который используется в качестве защелки в кухонных шкафах. Этот магнит также оказался недостаточно сильным, кроме того, его магнитное поле приводило к вибрации контактов, от чего логика попадала в неопределенное состояние.
В конце концов я нашел больший магнит размером 30 X 50 мм. Он был прикреплен к небольшой пластмассовой коробочке, предназначенной для хранения запасных ключей от дома или от автомобиля. Магнит оказался очень подходящим для моей цели. До изготовления и установки дешифратора команд, который описывается в следующей главе, вы можете попробовать управлять Бастером с помощью модифицированной панели управления. Показанная на рис. 5.7 модифицированная панель даст возможность управлять Бастером после изготовления и установки системы управления поворотом.
Окончательная сборка, установка и регулировка
Остановившись на одном из вариантов системы управления поворотом, соберите блок электромеханической обратной связи, печатную логическую плату управления поворотом и панель управления. Логические схемы, разумеется, следует разместить на стандартной плате размером 100 X 150 мм.
Установите логическую плату непосредственно над платой управления скоростью движения и соедините по схеме, показанной на рис. 5.8.
Рис. 5.8. Схема соединений между блоками системы управления поворотом Бастера I. * - используется только во втором варианте системы управления
Подайте полное напряжение аккумуляторов и попробуйте включать команды поворота. Для поиска неисправностей, появляющихся во время этих начальных проверок, особенно полезны логические уравнения для MR и ML. Действительно, было бы чрезвычайно трудно обнаружить неисправность при отсутствии возможности следить за логическими состояниями элементов схемы на печатной плате, если нельзя было бы обратиться к логическим уравнениям.
Можно надеяться, что проведенное в этой главе обсуждение различных проблем и способов их разрешения окажется полезным для преодоления других непредусмотренных трудностей при создании этой довольно тонкой системы управления с электромеханической обратной связью. Как и в отношении схем Бастера I, чрезвычайно важно разрешить все попутные проблемы еще до перехода к следующей фазе программы.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'