Робот сам по себе
Крымов Ярослав Григорьевич - Что такое робот?
Роботов на самом деле изобрели писатели-фантасты, и само слово "робот" придумал чешский писатель Карел Чапек. Книжные роботы и по виду, и по поведению очень похожи на людей. Они работают как люди, и даже быстрее и лучше. Роботы там и думают, - конечно, не так, как люди, по-своему, но думают, разговаривают, дружат или ссорятся между собой и с людьми, радуются, страдают.
1770 год
Реальные роботы, работающие сегодня в заводских цехах, и их гораздо более умелые "младшие братья" из лабораторий робототехники совсем не похожи на своих литературных предков. Это - автоматические машины, и, как всякая машина, они умеют делать только то, что предусмотрел создавший их человек. Но все же это машины особенные - они легко справляются со многими, казалось бы, чисто человеческими делами, потому что работают не резцами, фрезами или сверлами, как станки, а "руками" - как люди.
Вы никогда не задумывались над тем, какой удивительный инструмент подарила каждому из нас природа? Он легко управляется с пудовой кувалдой кузнеца и монтирует электронные схемы, которые и разглядеть-то можно только под микроскопом, делает тончайшие хирургические операции и валит столетние деревья - один и тот же инструмент.
Этот инструмент - человеческие руки! Если предложить разработать что-нибудь подобное самому опытному и талантливому инженеру-изобретателю, то он посмотрит на вас, как на сумасшедшего. А вот созданные природой руки, которыми управляет человеческий мозг, делают не только эти, но и тысячи других всевозможных дел. Если нужно - они перестраиваются с одной работы на другую, за считанные часы обучаются новой профессии, с которой раньше вообще никогда не сталкивались...
Да можно ли вообще создать замену такому необыкновенному инструменту? Оказалось, что можно, хотя это очень и очень непросто. Потому-то роботы и появились сравнительно недавно - только лет пятнадцать - двадцать назад.
Что же представляет собой не фантастический книжный, а настоящий, реальный робот? Прежде чем отвечать на этот вопрос и разбираться, как робот устроен и действует, давайте просто посмотрим на него. Для этого мы отправимся в цех одного из ленинградских машиностроительных заводов.
...Мы в механическом цехе, где обрабатывают на станках детали будущих машин. Над нами протянулась чуть не на полкилометра высоченная, наполовину стеклянная крыша. Ряды стальных колонн делят ее на пролеты-участки. Вот тут, рядом с нами, участок, где обрабатывают всякие валы, валики, заготовки для шестеренок и другие круглые детали - так называемые тела вращения. Станки выстроились в два ряда. Вот токарные - их легко узнать по тому, что деталь вращается, а резец почти неподвижен. Дальше - фрезерные и сверлильные, а в самом конце пролета - шлифовальные. Они наводят на детали окончательный глянец. Станки работают: слышен шум моторов, из-под резцов сыплется стружка, но людей почти не видно. Значит, мы с вами попали на участок автоматических станков с числовым программным управлением, или станков с ЧПУ. Но здесь не только станки. Возле каждого из них на массивной металлической подставке-тумбе какое-то странное угловатое сооружение, выкрашенное в ярко-желтый цвет и не похожее ни на одну привычную машину. Это и есть робот.
Это робот? Но в нем же нет ничего человеческого... - подумаете вы. И будете правы - во всяком случае пока робот бездействует. Однако не спешите с выводами, посмотрим, что будет дальше.
Вот ближайший токарный станок как раз останавливается: деталь вращается все медленнее, резец отъехал в сторону. Значит, обработка закончена, пора снимать со станка эту деталь и ставить новую заготовку. Что же будет теперь?
И тут желтое сооружение на тумбочке вдруг начинает менять свои очертания: рычаг, который раньше был втянут в массивное основание и не бросался в глаза, плавно потянулся к станку. На его конце раскрывается похожая на рачью металлическая клешня, точно посередине охватывает деталь и коротким, почти неуловимым, движением вынимает ее из патрона станка. Еще два движения - на себя и вниз - и вот уже деталь лежит в стоящем возле станка металлическом ящике-контейнере рядом с другими точно такими же. А "рука" робота уже нырнула в другой контейнер, ухватила новую заготовку и вставила ее в патрон. Зашипел сжатый воздух, загудел мотор станка, подъехал суппорт с резцом, и вот уже по тусклой поверхности необработанного металла побежала постепенно расширяющаяся светлая дорожка... На все это потребовалось гораздо меньше времени, чем занял этот рассказ.
Движения робота так похожи на человеческие, что прямо оторопь берет, когда видишь их в первый раз. А присмотревшись, начинаешь понимать, что так работать может только очень опытный мастер: движения точные, быстрые, экономные. У нас с вами это наверняка не получилось бы. Как же удается такое неодушевленной машине? Давайте познакомимся теперь с роботом поближе.
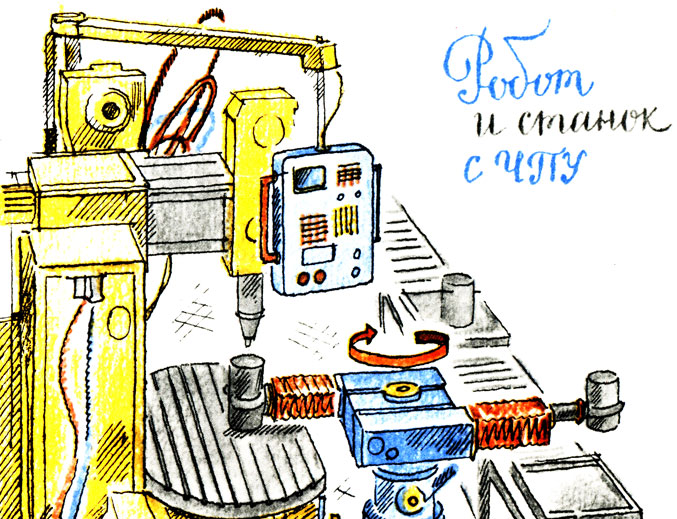
Робот и станок с ЧПУ
Вспоминая о действующем роботе, мысленно видишь прежде всего его "руку" и "пальцы". Это действительно основные части робота, отличающие его от всех других машин. Главная особенность роботовой руки - ее необыкновенная подвижность. У обычной машины, - например, у токарного станка - всего три вида движения, или степени свободы, как говорят инженеры: вращается заготовка, движется вперед - назад и вправо - влево суппорт с резцом. Вот и все. У "руки" робота степеней свободы гораздо больше: шесть, восемь, иногда даже десять. Она может подниматься - опускаться, поворачиваться в разные стороны, удлиняться - укорачиваться, изгибаться, вращать "кистью", шевелить "пальцами". Причем многие из этих движений совершаются не по отдельности, а одновременно, слитно. Из-за этого и появляется ощущение человекообразности. Правда, у настоящей, живой человеческой руки степеней свободы еще больше - целых двадцать семь. Но роботу хватает и шести. Ведь он не должен быть мастером "на все руки". По сравнению с людьми роботы - всегда узкие специалисты.
По этой же причине "рука" робота вовсе не должна быть точной копией человеческой. На рисунках видно, что она может быть похожа на стрелу подъемного крана, на змею, а то и вовсе ни на что знакомое не похожа - все зависит от того, какую работу она должна выполнять. И "кисть руки", или схват, как ее называют у роботов, не обязательно должна быть двупалой, как клешня. У нее может быть и три пальца, и один, и даже... ни одного. Например, у робота, который обслуживает штамповочный пресс, на конце "руки" - сильный электромагнит. Включился ток - стальной лист прилип к "руке" и удерживается прочнее, чем любыми пальцами. У роботов на московском заводе "Хроматрон", где делают цветные кинескопы для телевизоров, на конце "руки" - мягкая резиновая присоска. Такая "кисть", если из нее выкачать воздух, легко переносит хрупкую стеклянную колбу и не царапает стекло. У робота-сварщика "рука" оканчивается маленьким сварочным аппаратом с торчащим проволочным электродом. Единственный "палец" робота-маляра - распылитель для краски.
Надо сказать, что "конечности" роботов задают конструкторам очень сложные задачи. Судите сами: надо, чтобы искусственные механические "руки" были подвижными, гибкими в "суставах", но в то же время прочными - не сгибались под тяжестью груза, не дрожали, то есть не вибрировали во время работы. Погонишься за прочностью - "рука" получится слишком массивной, тяжелой. Такую трудно разогнать и еще труднее остановить там, где надо: по инерции она норовит проскочить дальше. А точность должна быть высокой: многие роботы имеют право ошибаться не больше, чем на доли миллиметра. Вот и приходится конструктору искать золотую середину, сравнивать разные варианты, искать лучший...
Но это еще не все. Для того чтобы механическая "рука" работала, ей, как и живой руке, нужны мускулы, которые приводили бы ее в движение. На техническом языке они так и называются - приводы. У роботов приводы могут быть четырех видов: пневматические, гидравлические, электрические и комбинированные или смешанные.
Пневматические, в которых работает сжатый воздух, - например, двигает поршень в цилиндре, - самые простые по конструкции и дешевые. Поэтому ими очень часто пользуются. Но годятся они только для роботов - "легковесов", которым не приходится носить тяжелые грузы. Для "тяжеловесов" - а есть роботы, поднимающие несколько тонн, - нужны гидравлические приводы. В принципе они похожи на пневматические, только на поршень там давит не воздух, а жидкость, чаще всего машинное масло - его гонит по шлангам насос под очень большим давлением. Тогда небольшой поршень в цилиндре превращается в настоящего силача. При диаметре несколько сантиметров он может поднимать тонны груза (вспомните физику).
Очень удобны электрические приводы, главная часть которых - электрический мотор или моторчик, но не обычный, а специальный, высокомоментный. Электрическими приводами удобно управлять, они очень точно останавливают "руку" робота в нужной точке. Правда, они довольно сложные, громоздкие и дорогие. Поэтому на практике часто используют не один какой-то тип привода, а их комбинацию: например, электрический и гидравлический.
Однако механические "мускулы" - это тоже еще не все. Ведь мускулами - и живыми, и искусственными - надо управлять. Когда я говорю, что мой сосед Вася научился, например, плавать или ездить на велосипеде, то это и значит, что теперь он умеет управлять своими мышцами. В живом организме ими управляют нервы, которые передают команды каждой мышце из мозга. А как у роботов?
Там тоже есть свой "мозг", который называется системой управления. По устройству он не имеет ничего общего с настоящим, живым мозгом. А вот работает в принципе так же, как у нас с вами, когда мы разучиваем какие-нибудь новые для нас сложные движения вроде комплекса гимнастических упражнений. Преподаватель показывает движение за движением: раз, два, три... - и так все подряд. Мы их запоминаем, а потом выполняем - именно в этом порядке. Вот так же и робот. Сначала он "запоминает" цепочку или последовательность команд, которые надо посылать "мышцам" - приводам, чтобы "рука" и охват робота совершали нужное движение. Такая цепочка команд называется программой. Потом - во время работы - система управления "читает" программу и посылает приводам нужные команды, а те двигают "руки" и схваты робота.
Именно поэтому - в отличие от большей части других машин - роботы легко меняют профессию. Для того чтобы обучить робота какой-то новой комбинации движений, надо только составить новую программу и заменить ею ту, которая командовала его работой раньше. Это замечательное свойство роботов инженеры называют гибкостью.
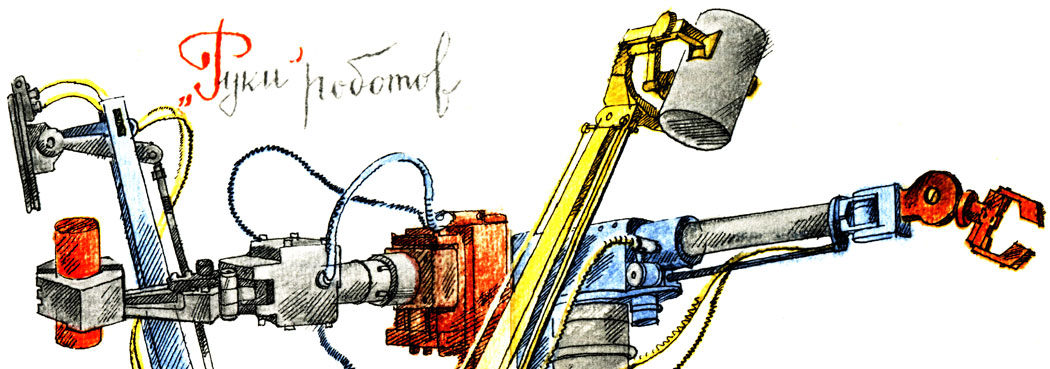
'Руки' роботов
Хотя внешне действия человека и робота могут быть очень похожими, между ними есть огромное принципиальное различие.
Если не считать простейших рефлекторных движений (вроде того, когда рука отдергивается от горячего), то человек всегда двигается осмысленно, с какой-то целью. Можно сказать, что человек каждый раз сам составляет программу своих движений так, чтобы достигнуть намеченной цели. К тому же, выполняя программу, он постоянно подправляет, улучшает ее, пользуясь для этого зрением, слухом и другими органами чувств.
Роботам это недоступно. Никаких целей у них нет и быть не может. Простейший робот - а мы только о таких пока и говорим - слепо выполняет ту последовательность движений, которая записана в программе, продуманной и составленной человеком. Ни на что другое он не способен. Кто-то из ученых сравнивал такого робота с дурачком из народной сказки, который плясал на похоронах, плакал на свадьбе и заливал водой костер, где палили свинью, потому что его так научили. Если вспомнить историю с бутылками, с которой мы начали разговор о роботах, то с этим придется согласиться...
Как же устроен "мозг" робота? Его конструкции могут быть разными. У самых первых роботов, которые появились в 60-х годах, движениями управляли электрические схемы на реле вроде тех, которые стоят в машинных отделениях лифтов. Каждая такая схема занимает большой шкаф, работают они не очень надежно, а если требуется изменить программу движений, то приходится переключать десятки проводов, потому что новая программа - это значит новая схема. Потом программы стали записывать в виде комбинаций дырочек на бумажной ленте (перфоленте) или на магнитной ленте - такой же как у магнитофона. Маленький электромоторчик перематывал оклеенную в кольцо ленту, а электронная схема "считывала" то, что на ней записано, и превращала электрические импульсы в команды приводам робота. Это было удобнее, не так громоздко, но все-таки не очень надежно. А надежность здесь - главное: если система управления начнет выдавать не те команды, которые нужны, робот может натворить бед. Но сегодня и то, и другое - уже вчерашний день роботостроения. Современными роботами управляют вычислительные машины.
То, что электронные вычислительные машины, или ЭВМ, могут не только с огромной скоростью выполнять всевозможные расчеты, но и управлять чем угодно - от космической ракеты до стиральной машины, - было известно давно. Но пока ЭВМ на лампах и даже на полупроводниковых транзисторах занимала целый зал и стоила сотни тысяч, а то и миллионы рублей, использовать ее для управления машинами и агрегатами на заводах было, понятное дело, невозможно. Потом на одном полупроводниковом кристалле стали делать сразу несколько транзисторов, соединенных в готовую схему. Из-за этого ЭВМ "похудели", стали надежнее и дешевле.
Сейчас на кремниевой пластинке размером с четвертушку жевательной резинки умудряются разместить сложнейшую схему из десятков, а иногда даже сотен тысяч транзисторов со всеми соединениями. Поэтому из набора громоздких шкафов ЭВМ превратилась в коробочку размером с записную книжку (вспомните микрокалькуляторы, которые продаются сегодня в любом канцелярском магазине). Мало того, они стали недорогими и надежными и могут годами работать без всякого ухода.
Вот такие вычислительные машины - их называют микро-ЭВМ или микрокомпьютерами - и служат "мозгом" современным роботам. Они запоминают программы не из десятков, как у первых роботов, а из многих тысяч команд, и поэтому электронные роботы держат в памяти и выполняют очень сложные и тонкие движения, без которых не обойтись, например, руке маляра или электросварщика. Кроме того, микро-ЭВМ постоянно контролирует исправность и правильность работы всех частей робота и если что-нибудь не так, останавливает его и подает сигнал - вызывает человека-наладчика.
И вот что еще очень важно: только ЭВМ позволяет, хотя бы отчасти, преодолеть в роботе "старательного идиота". Если, например, деталь, которую надо установить на станок, лежит не так, как нужно, а слегка наискось, то "рука" робота скользнет и не захватит ее. "Заметить" этого простейший робот не может. Он сделает все положенные по программе движения и аккуратно поставит на станок... пустое место. Вся работа, конечно, остановится...
А теперь представьте себе, что на этой "руке" рядом с пальцами-схватом торчат четыре упругие стальные проволочки вроде усиков жука. Если деталь лежит точно на своем месте, то все четыре усика коснутся ее одновременно и через специальные датчики передадут сигнал об этом в электронный "мозг" робота. Тот даст команду приводам сжимать схват и потом нести деталь куда следует. Если же хоть один усик не наткнулся на деталь, - значит, она лежит неправильно: или сдвинута в сторону, или повернута. Получив такой сигнал, управляющая роботом ЭВМ даст "руке" команду немного подвинуться в сторону или развернуть "кисть" так, чтобы все усики касались детали. Только теперь "пальцы" сомкнутся, и работа пойдет дальше. Конечно, ЭВМ не сама соображает, что надо сделать "руке", чтобы правильно захватить деталь. Она действует по инструкции, которую придумал и составил человек, а потом в виде специальной программы записал в ее память.
Получается, что такие роботы как бы наделены простейшими органами чувств. Их так и называют - очувствленные роботы. Очувствленный робот, который приноравливается к положению детали, - например, ощупывает ее, как в нашем примере, или осматривает с помощью телевизионной камеры, учитывает вес груза, его форму и так далее, - конечно, гораздо более квалифицированный и умелый специалист, чем простейший. Но зато он сложнее и, конечно, дороже. Так что ставить его на какую-нибудь несложную работу просто нет смысла.
'Мозг' роботов
Ученые уже работают над новым поколением роботов, которые должны быть еще гораздо более умелыми, квалифицированными и "интеллектуальными", чем нынешние очувствленные роботы. Но для заводов такие роботы пока еще довольно далекая перспектива, и мы сейчас говорить о них не будем.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'