1. Мы и роботы
1.1. История робототехники
Идея построения автомата, действующего без участия человека, занимала умы ученых и философов всех времен. Человечество мечтало перепоручить автоматам выполнение тяжелых, монотонных и неинтересных работ.
По дошедшим до нас легендам и преданиям, начиная уже с античных времен, многие изобретатели тратили годы на реализацию идей, связанных с созданием механического человека. Уже легендарный Дедал согласно преданиям делал статуи со скрытым внутри механизмом, которые с наступлением ночи сходили со своих пьедесталов. В Древнем Египте, Вавилоне, Китае статуи богов имели подвижные части. Механические игрушки строили в III в. до н. э. Филон Византийский и во II в. до н. э. изобретатель водяных поплавковых часов Ктесибий. Герон Александрийский (около I в. н. э.) описывает целое представление греческого театра механических кукол, приводимых в движение с помощью ниток. В "Илиаде" Гомера божественный кузнец Гефест выковывает золотых дев, которые прислуживают ему словно живые.
В XV в. механик Турианус сделал из дерева и металла барабанщика и флейтиста. Иегуда Лев бен Безалел из Праги построил из глины слугу, названного Големом. На седьмой день тот вышел из повиновения. Пришлось вынуть у него изо рта "шем" - глиняную табличку с формулами, посредством которых Голем управлялся.
На XVIII столетие приходится развитие и становление часового ремесла. В этот период создается множество различного рода автоматов, основанных на использовании часовых механизмов. В первой четверти XVIII в. механик из Гренобля Вокансон демонстрировал в Париже механического флейтиста, с помощью подвижных пальцев исполнявшего на своем инструменте одиннадцать мелодий. Флейтист представлял собой фигуру в рост человека, которая с помощью механического движения пальцев и воздуходувных мехов, приводимых в движение системой пружинных механизмов, с переменным нажатием на клавиши воспроизводила мелодии на настоящих музыкальных инструментах. Другой автомат Вокансона - утка (рис. 1), которая могла воспроизводить также большой комплекс движений. Она не только крякала, но и ходила, переваливаясь с боку на бок, плавала и плескалась в воде, двигала головой, расправляла крылья и приводила в порядок перья с помощью своего клюва. Утка также пила воду, поднимая голову, чтобы показать шею во время глотков, клевала зерна, "переваривая" их с помощью химических веществ, и выделяла экскременты. Автоматы Вокансона хранятся ныне в кабинете, названном его именем, в Парижской консерватории искусств и ремесел.
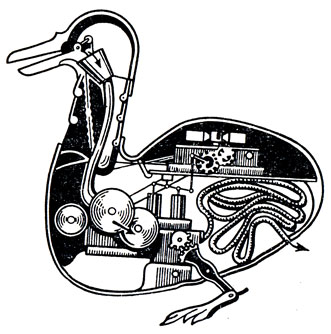
Рис. 1. Разрез утки-автомата Вокансона
В середине XVIII столетия монах Альберт фон Больттедт, прозванный современниками Великим за обширные познания, 30 лет строил механическую служанку, которая в конце концов научилась ходить, двигать руками, говорить. Другой его автомат представлял собой куклу в рост человека. Когда стучали в дверь, она открывала, закрывала ее, кланялась при этом входящему. Роджер Бэкон после долгих лет упорного труда создал говорящую бронзовую голову и большую летающую муху. Астроном Жан Мюллер сконструировал железного орла, который якобы неплохо летал. Полет механической птицы был рассчитан так, что она, сделав круг, возвращалась и вновь садилась на руку своего создателя. Примерно в то же время знаменитый механик Соломон де Коз построил механического человека, который мог петь. Предварительно его надо было зарядить водой и воздухом, а также развести огонь в особой камере.
Особенно громкую славу стяжали в XVIII в. часовщики из швейцарского города Лашо Пьер-Жак Дро и его сын Анри Дро. Они создали рисующего и пишущего мальчика и музыкантшу, играющую на клавикордах. Автоматы настолько поразили воображение парижан, что впоследствии все механические куклы стали называть "андроидами". Действительно, не отдать должного таланту Пьера-Жака и Анри Дро было нельзя. Перед их мальчиком клали на стол лист чистой бумаги. Повинуясь скрытому внутри механизму, он вдруг оживал, обмакивал перо в чернильницу и принимался писать на бумаге комплименты своим создателям. Программу можно было изменить - и писарь превращался в рисовальщика. Представление о человекоподобных автоматах того времени дает рис. 2, на котором представлена музыкантша, играющая на клавикордах. Этот экспонат в настоящее время хранится в музее города Нейхатель (ГДР). Играя, кукла ударяет пальцами по клавишам, поворачивает голову и двигает глазами, следя за своими руками. В кукле имитируется также внешнее проявление дыхания, грудь ее равномерно поднимается и опускается. Эти человекоподобные игрушки по современным понятиям представляли собой многопрограммные автоматы с оперативно сменяемыми программными кулачками (программы задавались с помощью сменных кулачков, устанавливаемых на вращающемся барабане; привод осуществлялся от часового механизма).

Рис. 2. Музыкантша, играющая на клавикордах
Из отечественных механизмов подобного рода можно назвать часы яйцевидной формы с театральным автоматом, подаренные Екатерине II знаменитым механиком-самоучкой И. П. Кулибиным и хранящиеся ныне в Эрмитаже.
В 1820 г. в Петербурге был открыт "Храм очарования" А. И. Галулецкого, обслуживаемый механическими слугами.
Идеи создания механического человека, начавшие было затухать вместе с ослаблением часового дела, вновь возродились в XX в. на основе электротехники и электроники.
Американский инженер Венсли построил управляемый на расстоянии с помощью свистка автомат "Телевокс", который мог не только выполнять ряд элементарных операций, но и произносить с помощью звукозаписывающей аппаратуры несколько фраз.
В 1932 г. англичанином Гарри Меемом был создан человекоподобный автомат "Альфа", который по командам, подаваемым голосом, садился, вставал, двигал руками, говорил. Несколько подобных автоматов "Сабор" были построены в Австрии Августом Губером. Ими управляли по радио. Они могли ходить, говорить, выполнять различные манипуляции.
Эта часть истории робототехники дает нам многочисленные примеры автоматов развлекательного или рекламного назначения, в большинстве своем копирующих отдельные функции человека, но не предназначенных для промышленного использования.
Всемирную выставку 1939 г. в Нью-Йорке открывал робот - больше как объект традиционного представления о роботах, чем символ тех технических возможностей, которые были заложены потенциально в достижениях машиностроения и электротехники, точной механики и электроники, измерительной и регулирующей техники. По крайней мере, специалистам в то время было ясно: автоматизация требовала не "искусственного человека", а автоматического осуществления ручных операций, которые превращали заготовки и материалы в механизмы и машины.
В конце 30-х - начале 40-х годов в Великобритании, США и СССР появились первые агрегаты из соединенных друг с другом станков, так называемые поточные линии. В этот же период начала внедряться копирная обработка деталей с применением фотоэлементов. Отдельные автоматизированные станки и линии этой поры, а также последующие технические реализации образовали реальную основу для развития современной робототехники.
История промышленных роботов начинается с 1958 г., когда фирмой "Консолидейтед контрол корпорейшен" (США) был продемонстрирован первый образец созданного Деволом робота. Первые роботы "Версотран" и "Юнимейт", предназначенные для промышленного применения, появились на рынке США. В это же время возник и термин "промышленный робот". По лицензии США начат выпуск роботов в Великобритании.
Бурное развитие робототехника получила после того, как японская фирма "Кавасаки" приобрела лицензию на производство промышленных роботов типа "Юнимейт". В начале 80-х годов начинается производство роботов в ФРГ, во Франции, в Италии. В 1975 г. в мире имелось 8500 роботов, а в 1980 г. - 28000. Сегодня во всех промышленно развитых странах работают десятки тысяч роботов.
В 1986 г. в мире производством роботов было занято около 200 фирм, которые выпускали более 250 марок промышленных роботов. Как правило, это роботы первого поколения с программным управлением. И хотя такие простейшие роботы будут применяться и в будущем, уже к концу 80-х годов значительную часть парка составят роботы второго поколения с развитыми средствами очувствления и микропроцессорным управлением. К концу нашего столетия основным типом станут роботы с элементами искусственного интеллекта. Именно эти поколения промышленных роботов позволят завершить замену основной части рабочих, занятых тяжелым и монотонным физическим трудом в промышленности.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'