Глава 1. Термины, определения и классификация
Основные понятия
Робот (Р) - автоматическая машина, включающая перепрограммируемое устройство управления и другие технические средства, обеспечивающие выполнение тех или иных действий (в зависимости от назначения Р), свойственных человеку в процессе его трудовой деятельности. Наиболее совершенный Р представляет собой машину, способную самостоятельно и в комплексе решать задачи самоуправления, адаптации с окружающей средой и выполнения трудовых воздействий. Различаясь техническим уровнем и показателями систем управления, информационного обеспечения и исполнительных органов, роботы образуют обширный класс машин, предназначенных для выполнения самых разнообразных операций. Общим признаком роботов является возможность быстрой переналадки для автоматического выполнения различных действий, предусмотренных программой.
Технические системы, характеризующиеся наличием одного или нескольких роботов, называют робототехническими (роботизированными) системами (РТС). Они могут быть разделены на следующие классы [44]:
- информационные и управляющие;
- мобильные (движущиеся);
- манипуляционные.
Информационные и управляющие РТС представляют собой комплексы измерительно-информационных и управляющих средств,автоматически производящих сбор, обработку и передачу информации, а также использование ер для формирования различных управляющих сигналов. В промышленных цехах - это системы автоматического контроля и управления процессами производства. Для исследовательских работ (в атмосфере, под водой, в космосе) такие РТС могут быть оснащены средствами передвижения и защиты от окружающей среды.
Мобильные (движущиеся) РТС обеспечивают автоматическое перемещение полезной нагрузки в пространстве. Могут иметь запрограммированный маршрут движения и (или) автоматическое адресование цели. Оснащаются движителями различных типов: колесными, гусеничными, шагающими, водометными, винтовыми, ракетными и т. п. В промышленности применяются для обслуживания складов, межцехового и внутрицехового транспортирования материалов, деталей, инструмента и оснастки. Такие подвижные РТС часто оснащаются манипуляторами.
Манипуляционные РТС предназначены для имитации двигательных функций руки человека. Наибольшее развитие и практическое применение они получили в промышленности, где их называют промышленными роботами.
Манипуляционные промышленные роботы относят к обширному классу машин, оснащаемых манипуляторами.
Манипулятор (М) - устройство для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом.
Объектом манипулирования называют тело, перемещаемое в пространстве манипулятором. К объектам манипулирования относят заготовки, детали, захватные устройства, вспомогательный, мерительный или обрабатывающий инструмент, технологическую оснастку и т. п.
Метод управления манипулятором (рис. 1) наиболее полно характеризует уровень автоматизации конструкции и возможность ее применения в различных условиях. По методу управления все М можно разделить на биотехнические (с ручным управлением), интерактивные (со смешанным управлением) и автоматические.
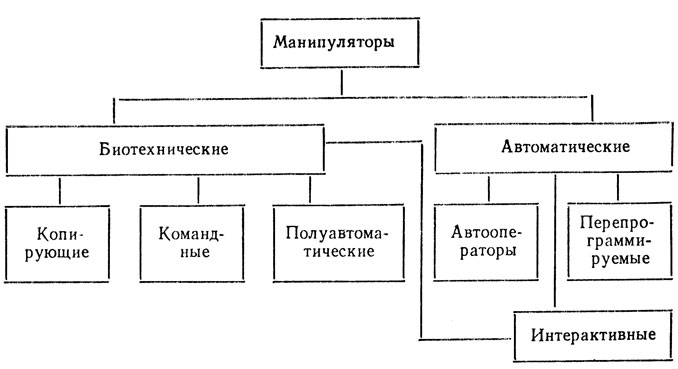
Рис. 1. Классификация манипуляторов по методу управления
Манипулятор с ручным управлением (биотехнический) - М, управляемый оператором. Это управление может осуществляться дистанционно или (и) непосредственно за счет перемещения рабочего органа М.
В состав структурной схемы М входят приведенные ниже основные элементы.
Задающий орган - функциональная часть М, предназначенная для создания управляющих сигналов и движений.
Исполнительный орган - функциональная часть М, предназначенная для выполнения действий по сигналам и движениям, поступающих от задающего органа.
Связующий орган предназначен для передачи сигналов и движений от задающего к исполнительному органу.
Рабочий орган - часть исполнительного органа, предназначенная для реализации технологического назначения М (выполняется в виде захватов, инструмента и т. п.).
В зависимости от типа задающего органа биотехнические М могут быть трех разновидностей.
В копирующем М движение рабочего органа повторяет перемещение кисти руки оператора. Задающее устройство кинематически подобно исполнительному механизму (обычно снабжается устройствами, позволяющими оператору ощутить в масштабе силы, действующие на исполнительный механизм).
В командном (некопирующем) М движение рабочего органа не связано кинематически с задающим устройством, а управление осуществляется по каждой из степеней подвижности в отдельности с помощью кнопок, рукояток и т. п.
В полуавтоматическом М задающая система включает в себя рукоятку, управляющую несколькими степенями подвижности, и малую ЭВМ или специальный вычислитель, которые преобразуют сигналы с рукоятки в сигналы, управляющие движениями исполнительных или рабочих органов.
Функциональные схемы основных видов биотехнических манипуляторов выполняют по принципу копирующего управления, по принципу раздельного управления приводами (командная система) и управления от задающего устройства типа рукоятки.
Все биотехнические М отличаются от автоматических отсутствием устройств памяти и требуют непрерывного участия оператора в процессе управления.
Одной из наиболее распространенных разновидностей биотехнических манипуляторов являются сбалансированные (шарнирные сбалансированные) манипуляторы с ручным управлением, содержащие систему уравновешивания рабочего органа.
В автоматическом М выполнение рабочих функций обеспечивается без участия оператора.
К числу автоматических манипуляторов могут быть отнесены автооператоры (А), промышленные роботы (ПР) и манипуляторы с интерактивным управлением (ИМ).
Автооператор (А) - автоматическая машина, состоящая из исполнительного устройства в виде манипулятора (или совокупности М и устройства передвижения) и неперепрограммируемого устройства управления, другими словами, А - неперепрограммируемый автоматический М.
Промышленный робот (ПР) - автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде М, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций (по ГОСТ 25686-85). В технической литературе часто встречается и более короткое определение: ПР - перепрограммируемый автоматический М промышленного применения. Характерными признаками ПР являются автоматическое управление; перепрограммируемость - способность к быстрой автоматической или при помощи человека-оператора замене управляющей программы (к изменению последовательности, системы и содержания команд); способность к выполнению трудовых действий.
Интерактивный робот - попеременно управляемый оператором или действующий автоматически. В отличие от биотехнических, интерактивные системы имеют устройства памяти для автоматического выполнения отдельных действий. В зависимости от формы участия человека интерактивное управление может быть двух видов:
- автоматизированное, т. е. чередование во времени автоматических режимов управления с биотехническими;
- супервизорное, когда все части заданного цикла операций выполняются роботом автоматически поэтапно, но переход от одного этапа к другому может осуществляться только после подачи оператором необходимой целеуказательной команды.
Разновидностью интерактивного управления является диалоговое управление, предполагающее разнообразные формы общения оператора с системой управления (на языках любого уровня, включая подачу команд голосом, текстом и т. п.).
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'