Структура промышленного робота
Структурная схема ПР представлена на рис. 2.
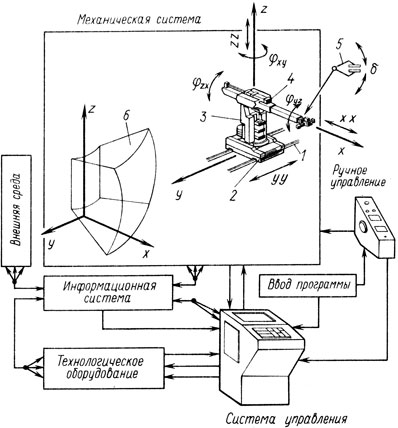
Рис. 2. Структурная схема промышленного робота, основные элементы конструкции и виды движений рабочих органов: 1 - путепровод; 2 - основание; 3 - корпус; 4 - рука; 5 - захватное устройство; 6 - рабочая зона и система координат основных движений ПР: хх - направление движения руки вдоль продольной оси; yy - направление движения корпуса робота по путепроводу; zz - направление движения руки вверх-вниз; φxy - угол поворота корпуса робота вокруг вертикальной оси zz: φzx - угол поворота руки в вертикальной плоскости; φyz - угол поворота захватного устройства относительно оси хх; δ - направление движения захвата (зажима) детали; δ и φyz - направление ориентирующих движений: xx, zz, φxy и φzx - направления транспортирующих движений; yy - координатное движение
Система программного управления (СПУ) предназначена для программирования, сохранения управляющей программы, ее воспроизведения и отработки.
Структура СПУ в общем виде приведена в табл. 1. В зависимости от решаемых задач состав систем управления может варьироваться.
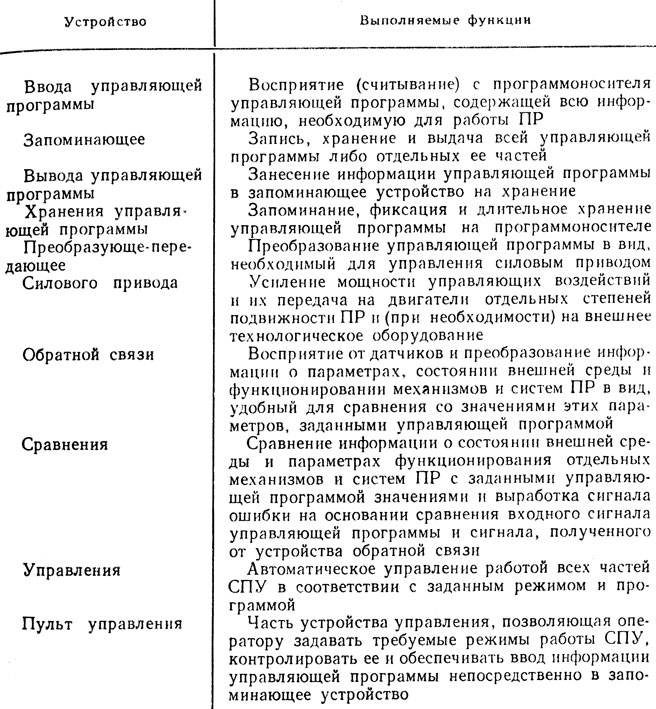
Таблица 1. Структура системы программного управления промышленным роботом
Управление роботом осуществляется на основании программы его работы.
Программа - полное и точное описание на некотором формальном языке процесса обработки информации, приводящего к решению поставленных задач.
Управляющая программа - последовательность простых инструкций, выполненных на некотором формальном языке, причем исполнение этих инструкций при соблюдении определенной очередности приводит к решению поставленной задачи.
В общем виде для функционирования ПР необходима информация о последовательности выполнения шагов программы, о пространственном положении отдельных степеней подвижности и о времени выполнения отдельных шагов программы и отдельных управляющих команд (табл. 2). Эта информация, зафиксированная тем или иным способом, является управляющей программой. Материальный носитель, в котором она зафиксирована, называют программоносителем.
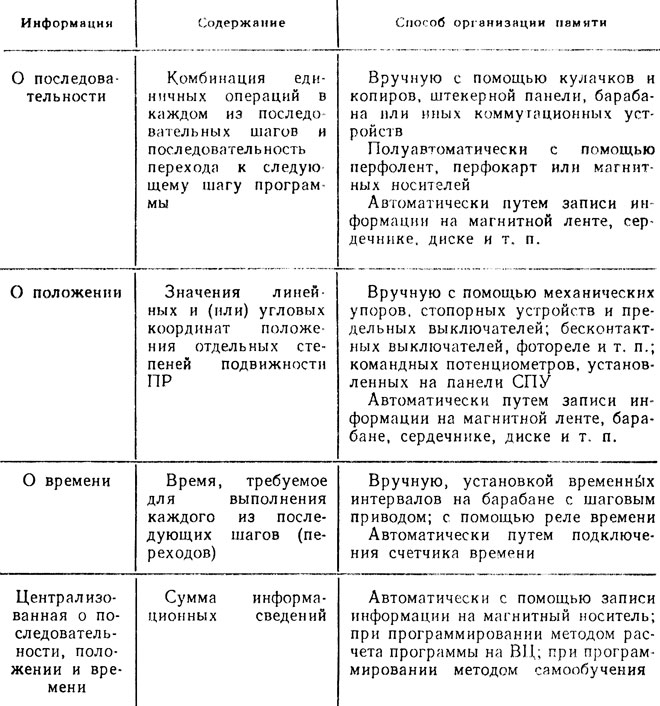
Таблица 2. Виды информации для управления ПР
Управляющая программа может быть зафиксирована как с помощью механических аналогов (упоров, копиров и т. п.) и различных коммутаторов (штекерных панелей, барабанов, коммутационных полей и т. п.)" так и на быстросменных носителях (перфолентах, магнитных лентах, дисках и т. д.). В качестве устройств ввода управляющей программы с быстросменных носителей применяют контактные и бесконтактные считывающие устройства (для перфолент и перфокарт), а также различные магнитные накопители (для магнитных лент, барабанов и дисков). Устройствами ввода управляющей программы являются также пульты обучения и управления, позволяющие ввести управляющую программу непосредственно в запоминающее устройство СПУ.
Программирование - подготовка задачи управления для ее решения и ввод информации управляющей программы в запоминающее устройство СПУ.
Программирование ПР может осуществляться методами:
- обучения (наиболее распространен);
- расчета управляющей программы;
- самообучения.
При первом методе управляющая программа формируется в режиме диалога СПУ с оператором, который с помощью ручного пульта (панели) управляет роботом, осуществляя последовательную отработку необходимых операций с последующим занесением информации в запоминающее устройство СПУ. При втором методе программу рассчитывают либо на вычислительном центре (ВЦ) на одном из специализированных языков (код ISO, система команд машины и т. д.) или на языках высокого уровня, либо в самой СПУ с помощью вычислителя по директивам оператора. При самообучении программа ПР формируется на основе информации, анализируемой системой восприятия внешней среды с последующим запоминанием полученной информации и организацией соответствующих команд.
Запоминание управляющей программы - сохранение в течение требуемого времени информации управляющей программы в запоминающем устройстве.
Емкость (объем) памяти запоминающего устройства - наибольшее количество информации, которое может храниться в запоминающем устройстве. Для систем ЧПУ объем памяти определяется количеством машинных слов или двоичных знаков. Для систем ЦПУ емкость памяти - максимальное количество управляющих команд. Емкость оперативной памяти запоминающего устройства (ОЗУ) - максимальное количество информации управляющей программы, непосредственно участвующей в текущем процессе выполнения операций по управлению ПР. Емкость внешнего запоминающего устройства (ВЗУ) - максимальное количество информации, которое может длительно храниться на программоносителе.
Воспроизведение программы - считывание информации из запоминающего устройства и передача управляющих сигналов к исполнительным механизмам ПР.
Отработка программы - выполнение ПР операций в соответствии с сигналами, переданными на его исполнительные механизмы при воспроизведении программы.
В зависимости от вида информации организация памяти может быть осуществлена различными способами (см.
Информационная система (ИС) обеспечивает сбор, первичную обработку и передачу в систему управления данных о функционировании узлов и механизмов ПР (в том числе и блоков системы управления) и о состоянии внешней среды.
ИС входит в состав СПУ и включает в себя устройство обратной связи (УОС), устройство сравнения сигналов (УСР) и комплекс датчиков обратной связи (ДОС) различного функционального назначения.
Информационные системы ПР по функциональному значению условно можно разделить на три подсистемы:
- восприятия и переработки информации о внешней среде, в которой функционирует робот;
- внутренней информации о состоянии узлов, механизмов и систем ПР;
- обеспечения техники безопасности. Условность такого разделения определяется тем, что одни и те же датчики и блоки обработки информации могут на основе межсенсорного и сенсомоторного взаимодействий участвовать как в восприятии внешней информации, так и в контроле собственного состояния ПР, а информационная подсистема обеспечения техники безопасности функционирует в результате взаимодействия двух первых подсистем.
Подсистема внешней информации определяет функциональные возможности ПР и степень сложности решаемых им задач; она предназначена для сбора информации о внешней среде и контроля состояния объекта труда и обслуживаемого оборудования. В зависимости от способа взаимодействия с объектами внешней среды эта подсистема может быть разделена на дистантную (визуальную, локационную) и контактную (осязания).
Контактные датчики применяют для обнаружения объекта, установления момента соприкосновения с ним, определения размеров объекта, контроля Давления на объект, выполнения различных производственных операций, установления подготовленности основного технологического оборудования к обслуживанию роботом, а также для обеспечения безопасной работы.
Назначение дистантных (бесконтактных) датчиков то же, что и контактных. Их преимущество - отсутствие непосредственного соприкосновения с объектом, вследствие чего они не испытывают силовых воздействий. Однако отсутствие контакта с поверхностью накладывает свои ограничения на решаемые с их помощью задачи. Так, использование дистантных датчиков затрудняет определение некоторых физических параметров объектов манипулирования - шероховатости поверхности, теплоемкости, электропроводности и т. п., а также затрудняет захват хрупких (деформируемых) объектов и контроль за надежным удержанием этих объектов в процессе манипулирования с ними.
Подсистема внутренней информации в зависимости от решаемых задач может содержать различные устройства:
- оценки положения и скорости движения степеней подвижности ПР, регистрирующие фактическое его состояние в каждый момент времени и сравнивающие поступающую информацию с требуемыми параметрами движения;
- аварийной блокировки, предотвращающие поломки механической системы ПР и взаимодействующего с ним оборудования при появлении случайных сбоев;
- диагностики и прогнозирования ресурса ПР, предназначенные для определения причин отказов, предуведомления о них и сокращения времени восстановления работоспособности ПР, а также для уменьшения числа отказов ПР путем своевременного проведения профилактических работ.
В качестве датчиков внутренней информации применяют предельные выключатели, бесконтактные переключатели, фотореле, реле давления, силовые датчики и датчики моментов. Датчиками внутренней информации могут быть и элементы системы внешней информации (оценка положения степеней подвижности ПР в пространстве путем прохода контрольных точек, оценка правильности протекания рабочего цикла по ответным командам от внешнего технологического оборудования и т. п.). Если в ПР используются гидро- или пневмомеханизмы с обратной связью, то для определения положений исполнительных органов применяют потенциометры, сельсины, резольверы, индуктивные датчики различных типов, генераторы импульсов, кодовые датчики и другие устройства. С помощью указанных датчиков в СПУ робота передается информация о положениях (линейных и угловых) исполнительных механизмов ПР, о подготовленности к работе приводов и т. п.
Информационное обеспечение работы ПР складывается из трех последовательно реализуемых этапов (фаз):
- захватывания объекта манипулирования;
- его перемещения в пространстве (транспортирования)
- "терминала".
Последняя фаза может преследовать три основные цели: достижение конечного положения и ориентацию объекта манипулирования относительно других объектов в рабочем пространстве; получение надежного контакта (взаимосвязи) объекта манипулирования либо конечного звена ПР с какими-либо объектами внешней среды; обеспечение на конечном звене ПР усилий или моментов, достаточных для выполнения производственных операций. Каждой из этих фаз требуется различное информационное обеспечение. Фазы захватывания объекта и терминала могут осуществляться под контролем подсистем внешней и внутренней информации. Фаза транспортирования требует в основном использования устройств оценки положения и скорости перемещений степеней подвижности ПР, а также устройств аварийной блокировки.
Механическая система (МС) обеспечивает выполнение двигательных функций и реализацию технологического назначения ПР. Ее часто называют собственно манипулятором. МС представляет собой пространственный механизм с разомкнутой кинематической цепью. Конструктивно МС состоит из следующих основных узлов: несущих конструкций, приводов, передаточных механизмов, исполнительных механизмов и захватных устройств.
Исполнительный механизм ПР (или М) - совокупность подвижно соединенных звеньев МС, предназначенных для воздействия на объект манипулирования или обрабатываемую среду. Исполнительный механизм, осуществляющий транспортирующие и ориентирующие движения, называют рукой ПР. Если звенья исполнительного механизма ПР соединены между собой только вращательными кинематическими парами, то в совокупности они образуют руку шарнирного типа (шарнирную руку).
Захватное устройство - узел механической системы ПР, обеспечивающий захватывание и удержание в определенном положении объекта манипулирования. Эти объекты могут иметь различные размеры, форму и массу, поэтому захваты относят к числу сменных элементов ПР и М. Как правило, ПР комплектуют набором типовых (для данной модели) захватных устройств, которые можно менять в зависимости от требований конкретного рабочего задания.
Соединение звеньев МС в кинематическую цепь осуществляется с помощью кинематических пар, основные типы которых представлены в табл. 3.
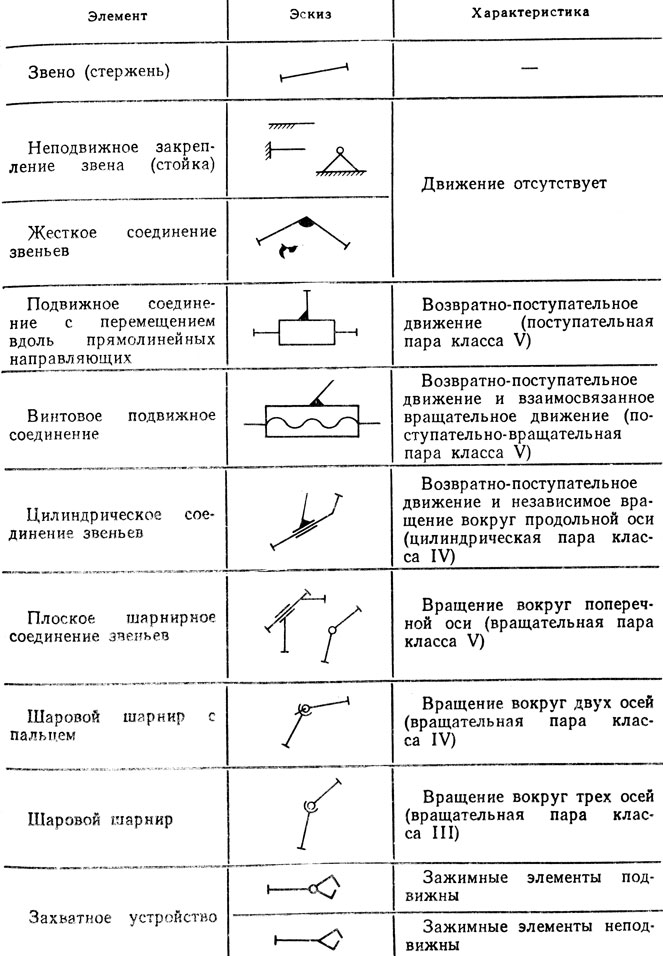
Таблица 3. Условные обозначения элементов структурных кинематических схем промышленных роботов и манипуляторов
В большинстве конструкций ПР нашли применение кинематические пары класса V - вращательные или поступательные, обеспечивающие одну степень свободы в относительном движении каждого из двух подвижно соединённых звеньев. Совокупность некоторого числа подвижных звеньев обеспечивает механизму определенное число степеней подвижности, являющееся важной характеристикой МС ПР.
Числом степеней подвижности W кинематической цепи называют число степеней свободы кинематической цепи относительно звена, принятого за неподвижное [7].
Число степеней подвижности определяют по формуле Соснова-Малышева:
где n - число подвижных звеньев кинематической цепи; p1, p2, p3, p4, p5 - число кинематических пар соответственно I, II, III, IV и V класса.
Для плоских механизмов
Для кинематической цепи, образованной только парами V класса,
или
В открытых кинематических цепях, к которым относят механические системы ПР и М, число n подвижных звеньев всегда равно числу пар: n = p1 + p2 + p3 + p4 + p5. Таким образом, для ПР и М
или для плоского механизма
Относительные движения звеньев механической системы ПР, посредством которых реализуются степени подвижности, разделяют (см. рис. 3) на три группы: ориентирующие (локальные), транспортирующие (региональные) и координатные (глобальные).
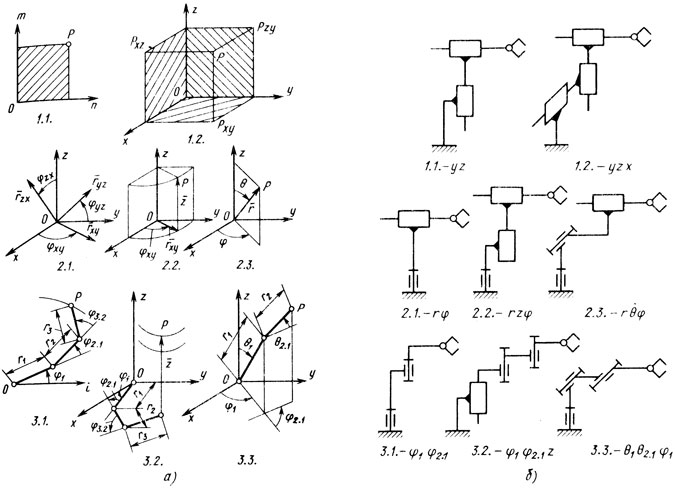
Рис. 3. Системы основных координатных перемещений звеньев механической системы манипуляторов и промышленных роботов (а) и соответствующие им примеры структурных кинематических схем (б). Обозначения: 1.1 - прямоугольная плоская система координат; 1.2 - прямоугольная пространственная система координат; 2.1, 2.2, 2.3 - полярные системы координат, соответственно плоская, цилиндрическая и сферическая; 3.1, 3.2, 3.3 - ангулярные системы координат, соответственно плоская, цилиндрическая и сферическая
Ориентирующими движениями называют перемещения захватного устройства (инструмента), соизмеримые с его размерами. Транспортирующие движения захватного устройства или инструмента в различные зоны рабочего пространства определяются размерами звеньев руки и соизмеримы с размерами рабочего места (обслуживаемого оборудования). Координатные движения - это перемещения на расстояния, превышающие размеры самого ПР и размеры обслуживаемого им оборудования или рабочего места.
Механическая система ПР может быть разделена на четыре структурных элемента, отличающихся функциональным назначением и характером выполняемых движений: основание (неподвижное звено), которым, в частности, может быть опорная конструкция или путепровод; корпус (стойка, каретка); механическая рука; захватное устройство.
Число степеней подвижности: основания Wο = 0; корпуса (каретки, стойки) WК ≥ 0 (определяется мобильностью ПР); механической руки WМ ≥ 1 (определяется назначением ПР); захватного устройства WЗ ≥ 0 (в зависимости от способа удержания объекта манипулирования и конструктивного исполнения).
Маневренность М - число степеней подвижности МС при фиксированном положении захватного устройства; определяет возможность обхода рукой препятствий в рабочем объеме и способность М к выполнению сложных операций.
Коэффициент сервиса М характеризует возможность подхода захватного устройства (конечного звена) М к заданной точке с разных направлений и дает представление о двигательных возможностях М.
Совокупность степеней подвижности на захватном устройстве (конечном звене) М позволяет ему занимать те или иные положения в некоторой области пространства, которая ограничивается конкретными связями и длиной звеньев кинематической цепи.
Совокупность возможных положений оси захвата, при которых центр его находится в заданной точке рабочего пространства, определяет телесный угол υ, называемый пространственным углом обслуживания, или углом сервиса.
Отношение ξ = υ/4π называют коэффициентом сервиса в данной точке. Он может изменяться от нуля на границе рабочего пространства (где ось захвата может занимать только одно положение) до единицы для точек так называемой зоны 100 %-ного, или полного, сервиса (в этих точках ось захвата может занимать любое пространственное положение).
Полным коэффициентом сервиса ПР и М принято называть среднее значение коэффициента сервиса в рабочем пространстве объемом V:
Коэффициент сервиса ξ дает возможность качественной оценки кинематических свойств ПР в целом.
Расчеты полного коэффициента сервиса и значений ξш в разных точках рабочего пространства производят с помощью ЭВМ.
Оценка кинематических свойств М коэффициентом ξ позволяет выбрать рациональный вариант структурной схемы руки. Задача оптимизации сводится к выбору для звеньев, вида и расположения кинематических пар, при которых значения ? достигают максимума.
В зависимости от конструктивной схемы МС рука ПР и М может находиться в рабочем объеме, имеющем ту или иную форму, а ее движения - осуществляться в различных системах координат.
Система координатных перемещений (система координат) ПР определяет кинематику основных движений и форму рабочей зоны. К основным движениям относят все движения МС без учета движения захвата (зажима) детали, ориентирующих движений и дополнительных перемещений основания ПР.
Системы координат (рис. 3) бывают двух видов: прямоугольные и криволинейные.
В прямоугольной системе координат (плоская и пространственная) объект манипулирования помещается в определенную точку пространства Р путем прямолинейных перемещений звеньев механической системы ПР по трем (или двум) взаимно перпендикулярным осям.
В криволинейной системе координат наиболее распространены координаты: плоские полярные (перемещение объекта происходит в одной координатной плоскости в направлении радиус-вектора r и угла φ); цилиндрические, характеризующиеся перемещением объекта в основной координатной плоскости в направлениях r и φ, а также по нормали к ней z; сферические (полярные), где перемещения объекта манипулирования в пространстве осуществляются за счет линейного движения руки ПР на величину r и ее угловых перемещений φ и θ в двух взаимно перпендикулярных плоскостях.
Разновидностью криволинейной системы является ангулярная (угловая) плоская или пространственная (цилиндрическая и сферическая) система координат, характерная для движений многозвенных шарнирных рук ПР и М.
В ангулярной плоской системе координат объект манипулирования перемещается в координатной плоскости благодаря относительным поворотам звеньев руки, имеющих постоянную длину. Ангулярная цилиндрическая система характеризуется дополнительным смещением относительно основной координатной плоскости в направлении перпендикулярной к ней координаты z. В ангулярной сферической системе координат перемещение объекта в пространстве происходит только за счет относительных угловых поворотов звеньев руки, при этом хотя бы одно звено имеет возможность поворота на углы φ и θ в двух взаимно перпендикулярных плоскостях.
Виды систем координат и примеры соответствующих им структурных кинематических схем ПР приведены на рис. 3.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'