Классификация промышленных роботов
Классификация роботов по различным признакам, существенным для разработки типажа, представлена на рис. 4 (см. также ГОСТ 25685-83).
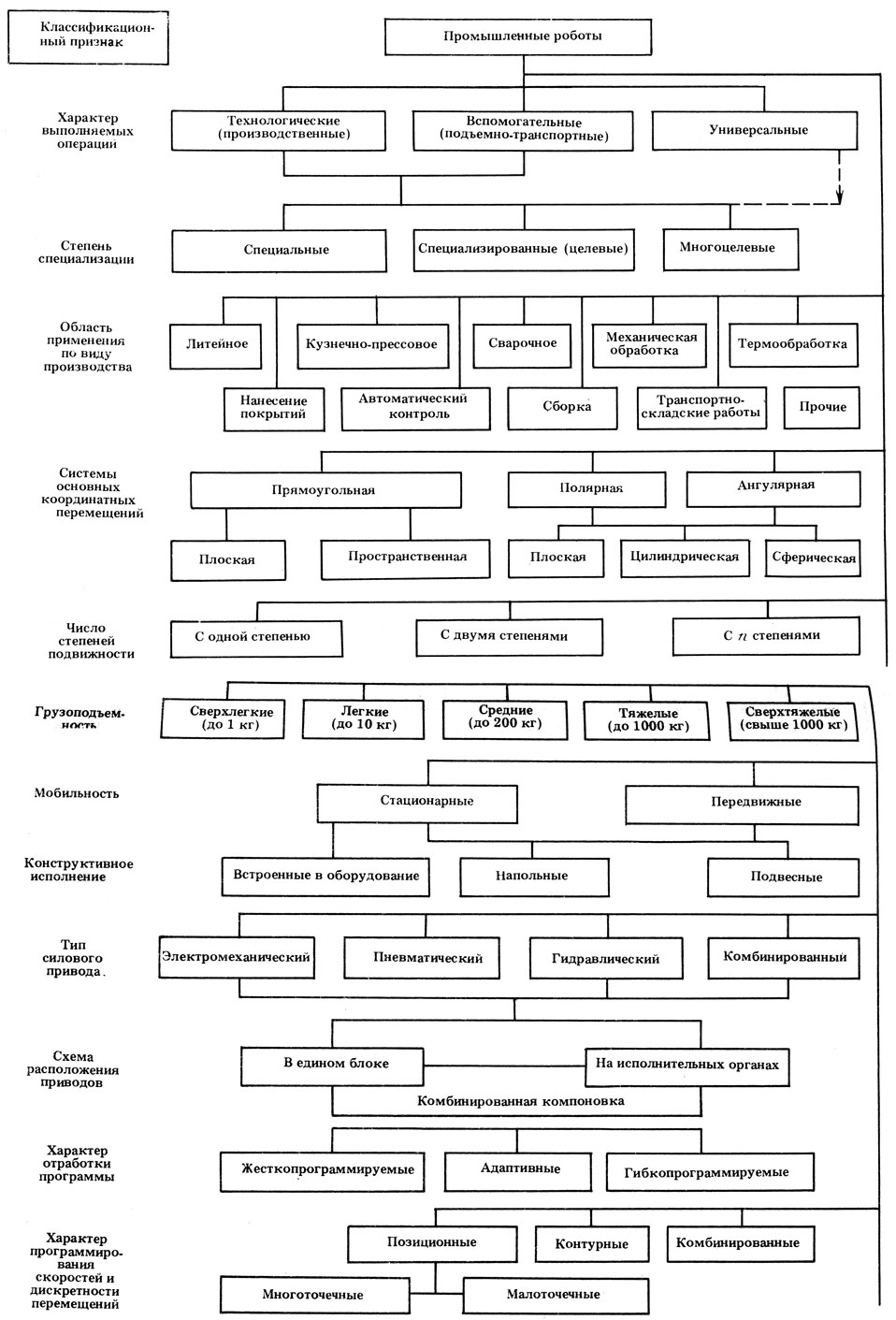
Рис. 4. Классификация промышленных роботов
По характеру выполняемых операций все ПР подразделяют на три группы, имеющие различные производственно-технологические признаки.
- Технологические (производственные) роботы (ТПР) выполняют основные операции технологического процесса. Они непосредственно участвуют в технологическом процессе в качестве производящих или обрабатывающих машин, выполняющих такие операции, как гибка, сварка, окраска, сборка и т. п.
- Вспомогательные (подъемно-транспортные) роботы (ВПР) выполняют действия типа взять-перенести-положить. Их применяют при обслуживании основного технологического оборудования для автоматизации вспомогательных операций установки-снятия заготовок, деталей, инструмента и оснастки, очистки баз деталей и оборудования, питания конвейеров, а также на транспортно-складских и других операциях.
- Универсальные роботы (УПР) выполняют разнородные технологические операции - основные и вспомогательные, т. е. они сочетают в себе признаки первых двух групп. Данный термин характеризует ПР как по характеру выполняемых операций, так и по степени специализации (см. ниже).
По степени специализации технологические или вспомогательные ПР подразделяют на специальные, специализированные и многоцелевые. Функциональные возможности специального ПР позволяют ему выполнять определенную технологическую операцию или обслуживать конкретную модель основного технологического оборудования. Специализированные ПР предназначены для выполнения технологических операций одного вида (сварка, окраска, сборка, гибка, штабелирование и т. п.) или (если это вспомогательные ПР) - для обслуживания широкой номенклатуры моделей основного технологического оборудования, объединенных общностью манипуляционных действий. Многоцелевые ПР предназначены для выполнения различных основных (ТПР) или вспомогательных (ВПР) операций, в том числе и таких, выполнение которых осуществляется разнотипными приемами.
Если ПР может выполнять и основные, и вспомогательные операции, объединяя признаки многоцелевых ТПР и ВПР, он относится к числу универсальных (см. рис. 4).
Функциональные возможности ПР во многом определяются типом СПУ и характером отработки программ. Большинство применяемых ПР относится к числу жесткопрограммируемых, программа действий которых содержит полный набор информации, не изменяющийся в процессе работы. Они не обеспечивают корректировки программы при изменении внешней среды.
Адаптивные ПР осуществляют свои действия с использованием информации об объектах и явлениях внешней среды, полученной в процессе работы. Они имеют сенсорное обеспечение, позволяющее корректировать управляющую программу.
Гибкопрограммируемые (интегральные) ПР способны формировать программу своих действий на основе поставленной цели и информации об объектах и явлениях внешней среды.
В ПР применяются три типа СПУ, классифицируемых в соответствии с характером и дискретностью перемещений степеней подвижности,- позиционные (от точки к точке), контурные (по непрерывной траектории) и комбинированные.
По типу представления задающей информации СПУ можно разделить на цикловые (ЦПУ), аналоговые (АПУ), числовые (ЧПУ) и аналого-числовые (гибридные).
Роботы с ЦПУ являются простейшими типами позиционных ПР. Программа систем ЦПУ содержит информацию о последовательности перемещений исполнительных механизмов ПР или о последовательности и скоростях; пути их перемещений задаются настройкой упоров, воздействующих на конечные переключатели.
В аналоговых СПУ информация задается в виде непрерывно изменяющихся значений физических (аналоговых) величин. В системах ЧПУ (позиционных или контурных) информация представлена в виде цифровых кодов, хранящихся на быстросменном носителе. В гибридных (аналого-числовых) СПУ могут использоваться различные способы представления информации.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'