Системы обеспечения техники безопасности
Безопасность персонала, работающего с комплексами, в состав которых входят ПР, обеспечивают с помощью различных мероприятий, целью которых является предупреждение аварийных и опасных для здоровья человека ситуаций. ПР, выполняющие манипуляционные действия и транспортные перемещения в пределах РК, являются устройствами повышенной опасности и могут стать основным источником травматизма обслуживающего персонала.
Общие вопросы построения систем безопасности при работе РК. Основными причинами возникновения аварийных ситуаций роботизированных комплексов могут явиться неправильные (непредусмотренные) движения ПР во время обучения и автоматической работы, в том числе погрешность позиционирования рабочих органов; авария технологического оборудования на участке; ошибочные действия оператора во время наладки и ремонта; доступ человека в рабочее пространство ПР при его работе в автоматическом режиме; нарушение номинальной грузоподъемности ПР; неудобное и тесное размещение технологического оборудования, пультов управления, тар, накопителей и транспортных средств на участке; размещение пультов управления внутри рабочего пространства ПР и отсутствие специального ограждения его; отключение при аварийной остановке ПР устройств, перерыв в работе которых связан с возможностью травмирования персонала; отсутствие четкой информации оператору о ситуациях на участке и причинах возникновения неполадок.
Безопасность при эксплуатации роботизированных комплексов достигается за счет их рациональной планировки, безопасности и безаварийной работы оборудования, а также с помощью специальных устройств, обеспечивающих безопасность обслуживающего персонала. Главная цель этих мероприятий и устройств состоит прежде всего в исключении возможности одновременного нахождения человека и механизмов робота в одном месте рабочего пространства.
Планировка комплексов оборудование - робот, роботизированных участков и линий должна обеспечивать свободный, удобный и безопасный доступ обслуживающего персонала к ПР, основному и вспомогательному технологическому оборудованию, к органам управления и аварийного отключения всех видов оборудования и механизмов, входящих в состав. Желательно, чтобы органы управления и аварийных блокировок были размещены на общем пульте управления и дублированы вдоль фронта оборудования по трассе возможных перемещений обслуживающего персонала.
При планировании РК необходимо обеспечить нормальные условия освещения и обзора для оператора.
Планировка РК (участков, линий) зависит также от типа используемого основного технологического оборудования, его компоновки, формы, размеров и расположения рабочих зон, уровня автоматизации оборудования, надежности его работы и степени информационного обеспечения; от компоновки и структурно-кинематической схемы ПР, а также от уровня его информационного оснащения. Например, требованиям обеспечения свободного доступа к оборудованию и его осмотра в большей степени соответствуют подвесные передвижные ПР, в том числе ПР, рабочие зоны которых не совмещены с рабочими зонами оператора. Оснащение ПР развитой системой информации о состоянии внешней среды также способствует улучшению условий безопасности обслуживающего персонала и безаварийной работе оборудования в составе РК.
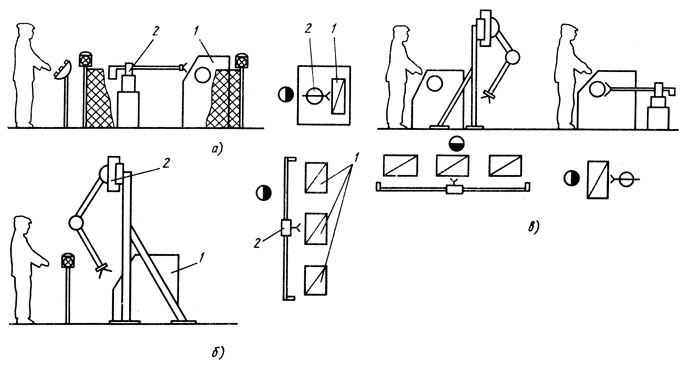
Рис. 1. Основные типы планировок роботизированных технологических комплексов: 1 - станок; 2 - ПР
С точки зрения обеспечения безопасности обслуживающего персонала следует рассмотреть три типа планировок РК, характеризующихся расположением рабочих зон ПР и операторов (рис. 1).
Комплексы, исключающие возможность появления оператора в пределах рабочей зоны ПР при его автоматической работе, показаны на рис. 1, а. Обычно это комплексы с круговым ограждением, при раскрытии створки которого посылается командный сигнал на останов ПР. К числу таких комплексов относятся и те, в которых использованы ПР, встроенные в основное технологическое оборудования. Требуемые переналадки и коррекция работы РК должны осуществляться на пультах оператора вне рабочей зоны ПР. Ограждение не должно затруднять визуальный контроль оператора за работой РК.
Устранение поломок и необходимую профилактическую работу осуществляют при выключении автоматического режима.
Комплексы с совмещением рабочих зон оператора и ПР показаны на рис. 1, б. В таких комплексах требуется принимать специальные меры безопасности обслуживающего персонала. Это комплексы с автономными ПР, осуществляющими единичное или групповое обслуживание оборудования. Если такие комплексы оснащены ПР, работающими по жесткой программе, то появление человека в рабочей зоне робота должно вызывать автоматическую блокировку его работы. При использовании ПР с гибким управлением (в том числе адаптивных ПР) последовательность и порядок отработки кадров управляющей программы не задаются исходно, а определяются в процессе функционирования на основании информации, поступающей с оборудования, входящего в состав комплекса (например, участки типа АСВР, см. гл. 6). При совмещении рабочих зон оператора и ПР в адаптивных РТК с гибким управлением остановка движений ПР должна осуществляться только в той точке (зоне) рабочего пространства, где находится оператор.
Комплексы с разделением рабочих зон оператора и ПР, например, когда ПР загружает оборудование с тыла, а оператор перемещается вдоль фронта станков, представлены на рис. 1, в. И в этом случае появление человека в рабочей зоне ПР должно вызывать блокировку работы робота автоматически.
Устройство защиты РК должны формировать командный сигнал на останов движений ПР в опасной для человека зоне его рабочего пространства. Для формирования такого командного сигнала устройства защиты должны осуществлять регистрацию пространственного положения ПР и отдельных его механизмов, а также местонахождения обслуживающего персонала при появлении его в рабочей зоне ПР. Снятие сигнала должен выполнять сам оператор, осуществляющий наладку и обслуживание РТК.
Конструкция ПР должна учитывать условия эксплуатации и особенности окружающей среды, которые могут повлиять на обеспечение надежности, безаварийности и безопасности работы. При эксплуатации в условиях агрессивных сред ПР должен быть поставлен в соответствующем защитном исполнении с учетом требований ГОСТ 12.1.004-85; ГОСТ 12.1.010-76, ГОСТ 12.1.011-78; ГОСТ 12.2.020-76 и ГОСТ 12.2.021-76. Внезапное отключение питания не должно приводить к повреждению ПР или травмированию обслуживающего персонала. Захватное устройство при отключении питания должно удерживать объект манипулирования. Сигнально-предупредительная окраска и знаки безопасности, наносимые на ПР, должны соответствовать требованиям ГОСТ 12.4.027-76. Основные требования к элементам конструкции должны соответствовать ГОСТ 12.2.003-74. При выборе средств аварийной и предупредительной сигнализации следует отдавать предпочтение звуковым сигналам.
Пульт управления ПР должен размещаться вне рабочей зоны в месте, обеспечивающем хорошее наблюдение за работой ПР и оборудования, входящего в состав РК.
Организация РК, автоматизированных участков и линий должна предусматривать максимальную механизацию и автоматизацию вспомогательных операций, связанных с воздействием на работающих опасных и вредных факторов. Ограждение, знаки безопасности и сигнальные цвета, наносимые на оборудование РК, должны отвечать ГОСТ 12.4.026-76. Расстояние ограждения РК от границ рабочей зоны ПР должно быть не менее 0,8 м.
При перемещении объектов манипулирования над рабочими местами, проходами и проездами под трассой ПР необходимо предусматривать защитные сетки, экраны или другие устройства. Если РК оснащен несколькими пультами управления, необходимо предусматривать соответствующие блокировки, исключающие возможность параллельного управления от различных пультов.
Автоматические линии и автоматизированные участки с применением ПР должны оснащаться кнопками аварийных блокировок работы ПР и оборудования других видов. Кнопки аварийных блокировок должны быть расположены в пределах рабочей зоны оператора на расстоянии не более 4,0 м одна от другой.
К работе по наладке и эксплуатации РК допускаются только лица, прошедшие специальную подготовку. Контроль за мероприятиями и средствами обеспечения безопасности и соблюдением персоналом требований техники безопасности должен осуществляться службой безопасности предприятия. Рациональные режимы труда и отдыха персонала, обслуживающего конкретные РК, регламентируются на основе межотраслевых и ведомственных нормативов.
Общие требования безопасности регламентируются ГОСТ 12.2.072-82.
Специальные устройства обеспечения безопасной и безаварийной работы оборудования РК.Устройства контроля отработки управляющей программы (УП) предназначены для проверки правильности выполнения ПР заданных перемещений. Способы этого контроля определяются конструкцией ПР, используемым типом привода и системы управления. В ПР со следящим приводом контроль УП обеспечивается датчиками обратной связи. В ПР с разомкнутой системой управления могут применяться различного рода устройства контроля правильности отработки геометрической информации.
В том случае, когда ошибка позиционирования накапливается постепенно, например в результате каких-либо систематических погрешностей в работе устройства ЧПУ, применяют контроль позиционирования ПР в особых точках внутри автоматизированного комплекса. Как правило, такие точки связаны с размещением отдельных единиц основного и вспомогательного технологического оборудования; например точка исходной позиции перед сканированием пространства тары при адаптивном разборе навала, исходная позиция перед заходом в станок при его загрузке (выгрузке) и т. п. При малом числе контрольных точек (2-3 по каждой координате) используют специальным образом настроенные предельные выключатели, располагаемые на самих ПР. Увеличение контрольных точек приводит к необходимости размещения чувствительных элементов в пределах всего РК.
Устройства контроля параметров взаимодействия со средой обеспечивают сокращение тяжести последствий аварийных ситуаций. Эти устройства должны осуществлять аварийную блокировку работы ПР при воздействии на отдельные его элементы предельных усилий со стороны обслуживаемого оборудования. Для этого часто рекомендуются силовые (моментные) датчики. В зависимости от конструкции ПР могут быть применены и другие, более простые устройства.
Захватные устройства часто оснащаются защитными скобами, представляющими собой тактильные датчики на основе микропереключателей, срабатывающие при контакте захвата с препятствием на пути его перемещения.
Помимо описанных выше устройств на общие показатели эксплуатационной надежности и безопасности работы влияет степень приспособляемости ПР к изменяющимся параметрам внешней среды, т. е. доля адаптивного управления в общем времени управления и развитость информационного оснащения. Адаптивное управление, особенно на входных позициях роботизированных комплексов, позволяет избежать аварий и поломок при неточном позиционировании заготовок на входе участка, а также при отклонениях формы и размеров заготовок.
Ограждение рабочей зоны ПР может быть выполнено на основе устройств, использующих различные контактные, силовые, ультразвуковые, индукционные, светолокационные и другие датчики. К числу таких устройств относят трапики, переходные мостики, буфера и т. п. Исходя из требований малой стоимости при высокой эксплуатационной надежности можно рекомендовать:
- контактные либо бесконтактные выключатели (для ПР с разомкнутой СПУ) для определения пространственного положения ПР и отдельных его звеньев датчики положений отдельных степеней подвижности (для ПР со следящим приводом);
- светолокационные датчики (например, датчики, работающие на просвет) для определения местоположения человека в рабочей зоне ПР.
В ЭНИМСе разработана система светозащиты рабочей зоны ПР, выполненная по модульному принципу с применением свето-локационных датчиков. Система обеспечивает эффективную защиту человека при любых конфигурациях РК. В состав системы входят стойки светоизлучателей и фотоприемников, применяемых попарно, а также блок логических преобразователей.
Конструктивно стойка светоизлучателя содержит собственно излучатель, сигнальный светофор и кнопку сброса. Стойка фото приемника содержит приемник, сигнальный светофор, кнопку сброса и плату усиления выходного сигнала фотоприемника. Назначение стоек излучателей и фотоприемников состоит в регистрации момента появления человека в соответствующей зоне рабочего пространства ПР.
Блок логических преобразователей (БЛП) осуществляет логическое преобразование сигналов фотоприемников и сигналов, характеризующих местонахождение ПР, в соответствии с конкретной применяемой схемой роботизированного производственного участка и вырабатывает соответствующий командный сигнал аварийной остановки движения ПР и сигнал сброса этой команды.
Информация о местонахождении ПР поступает на БЛП с бесконтактных микровыключателей, располагаемых вдоль всего рабочего пространства ПР на монорельсе. Максимальное число анализируемых зон местонахождения ПР равно 12.
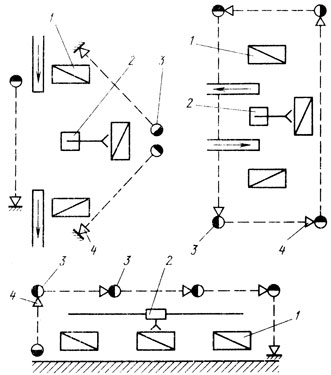
Рис. 2. Типовые планировки роботизированных комплексов и размещение на них светолокационных стоек: 1 - основное технологическое оборудование; 2 - промышленный робот; 3 - излучатель; 4 - приемник
Изменение логики преобразования сигналов БЛП в соответствии с требуемой конфигурацией роботизированного участка осуществляется путем требуемой замены печатных плат БЛП. На рис. 2 приведены типовые конфигурации участков и размещение на них светолокационных стоек.
Устройство работает следующим образом. Пересечение светового луча при входе человека в зону рабочего пространства приводит к включению всех лампочек-светофоров стоек, ограничивающих эту зону.
Если в этом случае ПР находится в этой зоне либо входит в нее, что регистрируется соответствующими бесконтактными выключателями, то формируется команда на аварийное торможение и выключение движения робота, которая поступает с БЛП в устройство ЧПУ, вызывая прекращение движения ПР.
При необходимости может быть вновь дано разрешение на отработку прерванной программы ПР путем сознательного нажатия человеком на одну из кнопок "сброс", находящихся на стойках, ограничивающих запрещенную зону ПР. Вместе с тем для увеличения безопасности обслуживающего персонала предусматриваются дополнительные устройства. Одно из них - выдвижные упоры, располагаемые в местах, ограничивающих рабочую зону ПР. Эти упоры выдвигаться могут как по команде оператора, так и по сигналу устройства светозащиты при появлении в данной зоне человека и препятствуют перемещению робота в эту зону. Могут использоваться и другие дублирующие устройства.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'