1.3. Эволюция роботов и РТК
Первые роботы и РТК на их основе были разработаны и внедрены в промышленность в середине 1960-х годов. Эти РТК представляли собой простейшие технологические ячейки, в состав которых входило основное технологическое оборудование (станки с ЧПУ, машины литья под давлением, прессы и т. п.) и обслуживающий их робот. При этом на робот обычно возлагались рутинные, вспомогательные операции (типа загрузки и выгрузки заготовок), которые требовали использования ручного труда и долгое время не поддавались автоматизации. Только с появлением в 1962 г. манипуляционных роботов открылась реальная возможность автоматизации ручного труда. В дальнейшем появились транспортные роботы и робототехнические системы искусственного интеллекта, которые позволили существенно расширить круг автоматизируемых технологических операций.
В чем же отличие роботов от традиционных средств автоматизации производства? Какие принципиально новые свойства они вносят в роботизированные ячейки и комплексы?
Главными отличительными чертами роботов являются гибкость, адаптивность и универсальность. Рассмотрим подробнее каждое из указанных свойств.
Под гибкостью роботов понимается способность их управляющей системы быстро перестраиваться на выполнение новых операций. Обычно это достигается путем перепрограммирования движений роботов в режиме обучения. Быстрота переобучения (перепрограммирования) роботов новым операциям придает РТК ту гибкость, которую до последнего времени имели только технологические ячейки, обслуживаемые человеком.
Адаптивность роботов проявляется в их способности быстро реагировать на внешние и внутренние возмущения и автоматически приспосабливаться к изменяющимся условиям функционирования. Адаптационные возможности роботов определяются, в первую очередь, характером их "очувствления", т. е. ассортиментом датчиков внутренней и внешней информации, и степенью "интеллекта", т. е. алгоритмическим и программным обеспечением управляющей системы.
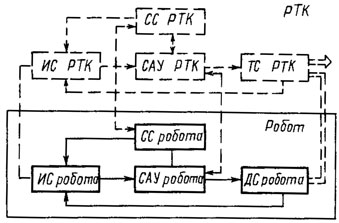
Рис. 1.4. Структура робота в составе РТК (ДС - двигательная система)
Важно отметить, что именно способность роботов быстро перестраиваться на новые операции и приспосабливаться к изменяющейся производственной обстановке принципиально отличает их от традиционных средств автоматизации (станков-автоматов поточных автоматических линий и т. п.). Последние конструируюте я таким образом, чтобы в течение всего срока эксплуатации надежно выполнять только ту технологическую операцию, для автоматизации которой они служат. Поэтому применение традиционных средств автоматизации с жесткой структурой и неизменным алгоритмом управления целесообразно и экономически выгодно только при многократном повторении операции. Такие условия складываются при крупносерийном и массовом производстве.
Другое отличие роботов от традиционных средств автоматизации заключается в их универсальности (или, иначе говоря, многофункциональности), позволяющей им успешно решать не одну и ту же задачу, а целый класс производственных - задач. Этот класс тем шире, чем разнообразнее функциональные возможности роботов, определяемые их кинематической схемой, динамикой приводов, разнообразием датчиков внутренней и внешней информации, уровнем искусственного интеллекта. В принципе универсальность роботов позволяет автоматизировать практически любые операции, выполняемые человеком в условиях современного производства с характерной для него большой номенклатурой и частой сменяемостью выпускаемой продукции.
Рассмотрим структуру и функции роботов в составе РТК и ГАП. В общем случае робот служит для автоматизации основных и вспомогательных технологических операций и для обслуживания оборудования в соответствии с заданным технологическим процессом. В этом смысле робот является центральным элементом РТК.
Структурная схема робота, встроенного в РТК, представлена на рис. 1.4. Как видно из рисунка, робот состоит из следующих систем: 1) информационной; 2) автоматического управления; 3)системы связи; 4) двигательной.
Охарактеризуем кратко функции каждой из названных систем.
Информационная система - это своего рода искусственные органы чувств робота, поэтому ее иногда называют сенсорной системой. Она предназначена для восприятия и преобразования информации о состояниях робота и обслуживаемого им оборудования РТК в соответствии с потребностями системы автоматического управления, играющей роль "мозга" робота. В качестве элементов информационной системы обычно используются телевизионные и оптико-электронные устройства, ультразвуковые датчики, лазерные дальномеры, тактильные, контактные и индукционные датчики, датчики положения, скорости, сил и моментов, акселерометры и т. п.
Система автоматического управления робота служит для выработки закона управления приводами двигательной системы на основе сигналов обратной связи от информационной системы. Другая важная функция системы автоматического управления - это планирование действий, программирование движений и принятие целенаправленных решений. Система автоматического управления роботов обычно реализуется на базе микро ЭВМ или микропроцессоров, имеющих большой ассортимент входных (аналого-цифровых) и выходных (цифроаналоговых) преобразователей и каналов связи. По этим каналам прямой и обратной связи, число которых колеблется от нескольких десятков до нескольких тысяч, могут передаваться непрерывные (аналоговые) и дискретные (цифровые) сигналы. Управляющие ЭВМ для роботов строятся в малогабаритном транспортабельном исполнении и обладают повышенной надежностью. Адаптационные возможности и интеллектуальные способности робота определяются главным образом тем, какое алгоритмическое и программное обеспечение заложено в его систему управления.
Система связи предназначена для обмена информацией между роботом, человеком и технологическим оборудованием. Цель такого обмена: передача роботу заданий в соответствии с изменяющейся технологией производства, контроль за функционированием робота, диагностика неисправностей, регламентная проверка и настройка подсистем робота и т. п.
Двигательная система определяет динамические свойства робота, в частности, его способность совершать разнообразные движения, диктуемые технологическим процессом. Управляющие сигналы, формируемые системой автоматического управления, поступают на исполнительные приводы двигательной системы и фактически отрабатываются ею. Тем самым обеспечивается возможность автоматизации широкого класса технологических операций, возлагаемых на РТК.
В качестве конструктивных элементов двигательной системы робота используются электрические, гидравлические и приводы, приводящие в движение исполнительные механизмы (манипуляторы, тележки с различными типами шасси и т. п.). В роли двигательной системы могут также выступать такие устройства, как силовая лазерная установка для технологической обработки заготовок или устройства манипулирования деталями с помощью электромагнитного поля.
Как уже отмечалось, характерными чертами роботов являются гибкость, адаптивность и универсальность. Благодаря этим качествам роботы могут выполнять те виды физической или умственной работы, которые принципиально невозможно или экономически нецелесообразно автоматизировать традиционными техническими средствами.
Развитие ГАП на базе РТК требует уточнения понятия "робот". Дело в том, что в современной промышленной робототехнике сложилась упрощенная трактовка этого понятия. Так, по определению Американского института роботов [128] "робот - это перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специальных устройств посредством перепрограммируемой переменной совокупности движений, направленной на выполнение широкого круга задач".
Аналогичным образом понятие "робот" определяется в ГОСТ 2586-83, согласно которому промышленный робот - это автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления, для выполнения в производственном процессе двигательных и управляющих функций, заменяющих функции человека при перемещении предметов производства и оснастки. При этом под перепрограммируемостью понимается возможность менять управляющую программу с помощью человека-оператора или автоматически путем переключения программ, заранее занесенных в память устройства управления.
Приведенные определения несколько сужают понятие "робот". Они не охватывают, в частности, транспортные работы, которые играют важную и все возрастающую роль в ГАП, поэтому данные определения целесообразно уточнить и расширить.
Роботом будем называть универсальную машину для автоматизации производства, способную быстро перестраиваться с одних технологических операций на другие и адаптироваться к изменяющимся производственным условиям путем информационного и двигательного взаимодействия с обслуживаемым оборудованием и объектами производства. В зависимости от типа двигательной системы и характера выполняемых технологических операций роботы могут быть манипуляционными, транспортными, измерительными и т. п.
Робот вместе с обслуживаемым им оборудованием образует роботизированный технологический комплекс. Если этот комплекс имеет единую систему автоматического управления на базе средств вычислительной техники, будем называть его робототехническим комплексом (РТК) с управлением от ЭВМ. Простейшим видом РТК являются роботизированные технологические ячейки (РТЯ), предназначенные для автоматизации небольшого числа основных или вспомогательных технологических операций. РТЯ имеет индивидуальную систему управления, если основные технологические операции выполняет сам робот, или групповую систему управления, если основные операции возлагаются на технологическое оборудование, а вспомогательные - на робот.
Более сложным видом РТК являются роботизированные технологические участки и линии (РТУ и РТЛ). Они служат для автоматизации широкого класса основных и вспомогательных операций. РТУ обычно включает несколько единиц технологического оборудования и роботов, координация работы которых осуществляется единой системой автоматического управления. Если операции, выполняемые на РТУ, технологически связаны и выполняются последовательно, то такой комплекс называется РТЛ.
Промышленные РТК можно рассматривать как ядро ГАП, в состав которого могут входить, например, несколько РТУ, автоматизированный склад и обслуживающие их транспортные роботы. Интеграция нескольких ГАП на базе единой системы автоматического управления позволяет создать роботизированные заводы-автоматы с гибкой безлюдной технологией.
Применение роботов и РТК в ГАП открывает реальные возможности и широкие перспективы для создания принципиально новых технологических процессов, не связанных обременительными ограничениями, налагаемыми участием в них человека. В известном смысле эти ограничения уже стали тормозом на пути комплексной автоматизации и интенсификации производства. При этом имеются в виду как принципиально ограниченные производственные возможности человека (например, в отношении грузоподъемности, производительности или точности выполнения технологических операций), так и ограничения на качество атмосферы, освещенности и т. п., связанные с необходимостью поддержания комфортных условий на рабочем месте.
Таким образом, робототехника выступает как мощное средство интенсификации производства и решения проблемы трудовых ресурсов. Последнее особенно важно для отечественной промышленности, где ощущается дефицит рабочей силы по ряду специальностей, непосредственно связанных с производством.
История развития робототехники коротка. Тем не менее роботы и создаваемые на их основе РТК принято делить на три поколения. Причиной такой эволюционной классификации послужило то, что за время своей истории роботы и РТК претерпели ряд качественных изменений как в смысле элементной базы, на которой они строятся, так и особенно в смысле принципов управления, реализуемых в их системе автоматического управления.
Роботы первого поколения - это роботы с программным управлением (программные роботы). Эти роботы предназначены в основном для выполнения определенной, заранее запрограммированной последовательности операций, диктуемой тем или иным технологическим процессом. Управление роботами первого поколения осуществляется по жесткой программе, формируемой в режиме обучения с помощью человека-оператора. Поэтому приемлемое качество управления достигается лишь при строго определенных и неизменных условиях функционирования. Следует, однако, подчеркнуть, что именно простота изменения программы, т. е. простота переобучения (перепрограммирования) роботов первого поколения при переходе на новые операции, сделала эти роботы достаточно универсальными и гибко перестраиваемыми на различные классы производственных задач в пределах функциональных возможностей данного робота.
Область возможных и экономически целесообразных применений роботов первого поколения достаточно широка. Эти роботы успешно применяются в РТК и ГАП с программным управлением для обслуживания металлорежущего оборудования (в частности, станков с числовым программным управлением), печей, штампов, прессов, технологических линий, сварочных аппаратов, литейных машин и др. Они осуществляют установку, снятие, транспортировку, упаковку изделий, простейшие сборочные операции, сварку, ковку, литье под давлением, термическую и механическую обработку и т. д.
Однако функциональные возможности роботов первого поколения существенно ограничиваются малым ассортиментом датчиков и несовершенством системы управления. Последняя служит в основном лишь для осуществления жесткой программы, заранее заложенной в память. Способность к восприятию обстановки в рабочей зоне у роботов первого поколения практически отсутствует, поэтому эти роботы не могут функционировать полностью автономно. Их программирование в режиме обучения, а иногда и эксплуатация требуют вмешательства человека-оператора.
Успешное применение роботов с программным управлением возможно лишь при детерминированных и неизменных условиях. Для организации таких условий требуется дополнительное технологическое оборудование, стоимость которого зачастую сравнима со стоимостью самого робота. Это усложняет процесс роботизации производства, делает его менее гибким, требует дополнительных затрат. Поэтому в последнее время особую актуальность приобрели научно-исследовательские и опытно-конструкторские разработки по созданию более совершенных роботов и РТК следующих поколений.
Роботы второго поколения - это роботы с адаптивным управлением. Они отличаются от программных роботов, во-первых, существенно большим ассортиментом сенсорных устройств, особенно датчиков внешней информации (телевизионные или оптические системы искусственного зрения, тактильные, силовые, локационные датчики и т. п.) и, во-вторых, более сложной системой автоматического управления. Последняя уже не сводится к простому устройству для запоминания и отработки жесткой программы движения, как у роботов первого поколения, а требует для своей реализации управляющей ЭВМ.
Искусственные "органы чувств" (или, как еще говорят, система очувствления) роботов второго поколения формирует сигналы обратной связи для системы автоматического управления. Последняя, обрабатывая поступающую информацию, синтезирует закон управления исполнительными приводами и механизмами робота с учетом сложившейся производственной обстановки. Этот закон управления может иметь ситуационный характер. В этом случае его синтез сводится к формированию связей типа "класс ситуаций - действие".
Другой способ адаптивного управления роботами сводится к аналитическому синтезу закона управления с обратной связью через систему очувствления. Такое управление естественно называть сенсорным. Его адаптационные возможности также принципиально ограничены. Более совершенным является такой способ управления, при котором сенсорное управление дополняется алгоритмом автоматической настройки (самонастройки) его параметров. Адаптационные возможности управления с самонастройкой практически не ограничены. За счет самонастройки системы управления робот может адаптироваться к заранее неизвестным и непредсказуемо меняющимся условиям эксплуатации.
Неотъемлемой частью роботов второго поколения является их программное обеспечение, реализующее описанные выше способы и алгоритмы управления. По мере совершенствования роботов и расширения класса решаемых ими задач относительная доля затрат на алгоритмическое и программное обеспечение системы автоматического управления неуклонно увеличивается. Это объясняется тем, что затраты на конструкционные компоненты роботов в известной мере стабилизировались. В то же время функциональные возможности роботов второго поколения определяются именно программным обеспечением и могут быть существенно расширены путем наращивания программ обработки сенсорной информации и адаптивного управления.
Роботы второго поколения, оснащенные большим ассортиментом датчиков и управляющей ЭВМ с развитым программным обеспечением, значительно превосходят по своим возможностям роботы первого поколения. Благодаря возможности воспринимать внешнюю обстановку, анализировать сенсорную информацию и приспосабливаться к изменяющимся условиям эксплуатации очувствленные роботы могут манипулировать неориентированными и неупорядоченными деталями, осуществлять сложные сборочные и монтажные операции, реагировать на препятствия в рабочей зоне и т. п.
В настоящее время промышленность активно осваивает выпуск роботов второго поколения. Несколько тысяч таких роботов уже используются в РТК с адаптивным управлением, которые встраиваются в ГАП. В ряде научных центров ведутся интенсивные исследования по разработке алгоритмического и программного обеспечения, а также средств очувствления перспективных моделей адаптивных роботов для гибкой автоматизации производства. Особое внимание в этих разработках уделяется системам технического зрения, тактильному и силомоментному очувствлению роботов.
Следующее, третье поколение роботов - это роботы с интеллектуальным управлением от ЭВМ. Они принципиально отличаются от роботов второго поколения сложностью функций и совершенством системы автоматического управления, включающей в себя те или иные элементы искусственного интеллекта. Необходимо подчеркнуть, что интеллектуальные роботы предназначены не только и не сколько для имитации физических действий человека, сколько для автоматизации его интеллектуальной деятельности, т. е. для решения производственных задач интеллектуального характера.
Отличительной чертой интеллектуальных роботов является их способность к обучению на опыте и адаптации в процессе решения задач. Что же касается самого умения решать интеллектуальные задачи, то оно является производным в том смысле, что существенно зависит от того, как протекал процесс обучения и адаптации робота.
Существуют различные возможности придать очувствленному роботу те или иные элементы искусственного интеллекта. Структура и совершенство систем автоматического управления интеллектуальных роботов определяется техническими возможностями реализации нужных элементов интеллекта, а также содержанием и сложностью производственных задач. В общем случае интеллектуальный робот способен понимать естественный язык и вести диалог с человеком, формировать в себе модель производственной обстановки, распознавать и анализировать ситуации, обучаться понятиям и навыкам, планировать поведение, строить программные движения двигательной системы и осуществлять их надежную отработку в условиях неполной информированности об изменяющихся производственных условиях.
Развитие робототехники находится на грани качественного скачка, в результате которого, по мнению ряда специалистов [33, 56, 128], годовой объем их выпуска в мире может резко возрасти (в 3-7 раз). При этом главное внимание будет уделяться разработке и серийному выпуску роботов с адаптивным и интеллектуальным управлением, а также созданию на их основе унифицированных РТК второго и третьего поколений. Мощным катализатором ускоренного развития роботов и РТК с адаптивным и интеллектуальным управлением являются ГАП, которые выступают как основной потребитель адаптивных РТК с элементами искусственного интеллекта.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'