2. Поколения и классификация роботов
2.1. Структура и состав роботов
Единого, общепринятого определения современных роботов пока не существует. Однако многие определения похожи друг на друга и в том или ином виде отражают тот факт, что робот активно взаимодействует с внешней средой и проявляет при этом некоторые элементы разумности. Например, в технической литературе можно встретить такое определение: робот - это автономно функционирующая универсальная автоматическая машина, предназначенная для воспроизведения определенных физических, двигательных и умственных функций человека, наделенная теми или иными средствами обратной связи (слухом, зрением, осязанием и т. п.), а также способностью к обучению и адаптации в процессе активного взаимодействия с окружающей средой.
Очевидно, что для реализации разумного поведения в состав робота наряду с сенсорной, управляющей и эффекторной системами должна входить система, имитирующая интеллект человека. Искусственный интеллект необходим для управления роботом при его автономном функционировании в априори неисследованной внешней среде. Необходим он также и для общения на естественном языке с человеком-оператором, который в общем случае находится на значительном удалении от робота.
С учетом отмеченного обстоятельства структуру робота, синтезированную в соответствии с кибернетической моделью рис. 1.4, представим в виде схемы, показанной на рис. 2.1. Эта схема построена в предположении, что управление роботом осуществляется по иерархическому принципу, в соответствии с которым система управления (СУ) реализует тактический уровень, а система искусственного интеллекта (СИИ) воспроизводит стратегический уровень управления. Причем, используя биологическую терминологию, можно считать, что СУ служит аналогом спинного мозга, а СИИ - техническим аналогом высших отделов головного мозга.
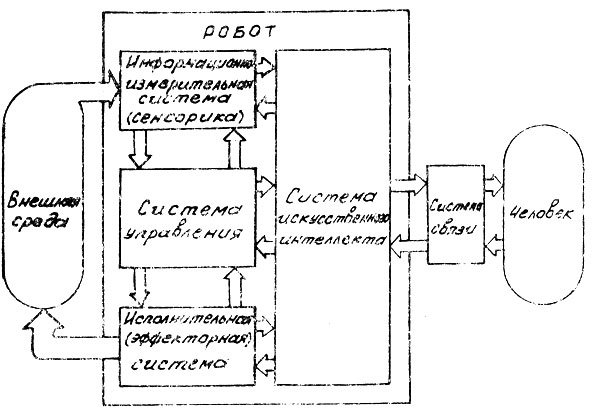
Рис. 2.1
Далее отметим, что система управления робота может быть выполнена в виде специализированного автомата с памятью либо реализована программным способом на основе универсальной ЭВМ. То же самое можно сказать и о системе, искусственного интеллекта. Система связи включает проводной или беспроводной канал передачи информации и на приемном конце также предполагает использование ЭВМ. На экране дисплея этой ЭВМ отображаются ситуации, попадающие в поле зрения робота либо непосредственно, либо в виде модели, которую робот синтезирует автоматически.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'