2.3. Классификация роботов
Одним из основных классификационных признаков, определяющих структуру, состав, внешний вид, эксплуатационные характеристики современных роботов, является область их использования. Классификация по этому признаку приведена на рис. 2.5.
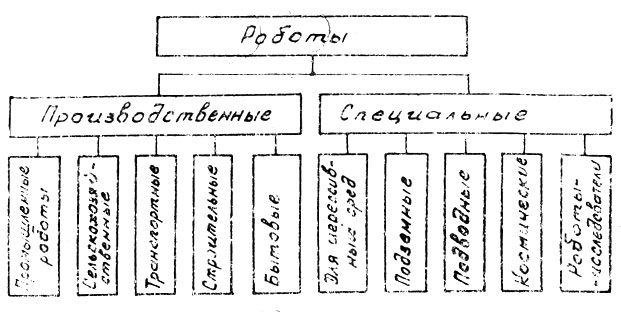
Рис. 2.5
Из всех выделенных на рис. 2.5 производственных роботов наибольшее распространение получили промышленные роботы, а среди специальных наиболее интенсивно развиваются космические, подводные и исследовательские роботы. Различия в структуре этих роботов существенно зависят от назначения и свойств среды, в которой они должны функционировать. Так, промышленный робот (ПР) должен работать в искусственной среде заводских помещений совместно с различным технологическим оборудованием. По этой причине антропоморфность ПР минимальна, а по структуре и составу он должен быть близок к обычным производственным автоматам. И наоборот, исследовательский робот, предназначенный для функционирования в естественной, часто неформализованной, внешней среде, должен обладать максимальной антропоморфностью на поведенческом уровне и иметь в своем составе развитую систему ИИ.
В тех случаях, когда необходимую систему ИИ построить затруднительно, используют специальные биотехнические методы управления. Суть их заключается в том, что человек-оператор воздействует непосредственно на приводные механизмы, т. е. может участвовать как в стратегическом, так и в тактическом управлении роботом.
Из рис. 2.6, а видно, что биотехническое управление, в свою очередь, разделяется на командное, копирующее и полуавтоматическое. Причем командное управление предполагает непосредственное воздействие оператора на каждый привод. Копирующее управление связано с отработкой тех движений, которые задает оператор путем воздействия на задающее устройство, кинематически подобное исполнительной системе робота. Полуавтоматическое управление основано на использовании специальной рукоятки, позволяющей задавать траекторию перемещения схвата манипуляционного робота. Необходимые при этом управляющие воздействия на приводы вычисляются включенной в контур управления ЭВМ.
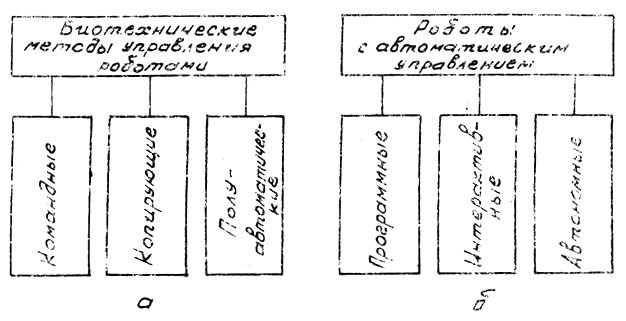
Рис. 2.6
В некоторых странах, например в США, Англии, ФРГ, манипуляторы с биотехническим управлением и, прежде всего с командным и копирующим управлением, к классу роботов не относят вообще. В Советском Союзе их иногда называют полуроботами, поскольку с точки зрения определения, приведенного в 2.1, роботы на тактическом уровне должны управляться автоматически. Поэтому классификация собственно роботов по используемому способу управления имеет вид, приведенный на рис. 2.6, б.
В целом автоматическое управление предполагает способность робота функционировать автономно. В частности, при программном управлении программа работы предварительно заносится в память робота, и он после этого исполняет записанную программу автоматически. Интерактивный способ связан с участием оператора лишь на стратегическом уровне управления и на этапе обучения. Автономное управление основано на использовании высокоразвитого ИИ, который позволяет длительное время обходиться без помощи человека-оператора и функционировать так, как было описано в 2.2. при рассмотрении роботов третьего поколения.
Иными словами, даже при управлении автономными роботами третьего поколения участие оператора на стратегическом уровне не исключается полностью, т. е. и здесь применяются элементы биотехнического управления. Использование такого управления позволяет избежать трудностей создания систем ИИ в исследовательских роботах первых поколений, поскольку оно основано на использовании для управления роботами интеллекта естественного. Именно по биотехническому принципу были построены первые космические роботы "Луноход 1" и "Луноход 2". По этому же принципу был построен ряд эффективных подводных роботов.
В данном пособии основное внимание будет уделено ПР, как наиболее полно разработанным и имеющим широкое распространение. Некоторые блоки таких роботов используются при проектировании исследовательских роботов, а также роботов других применений. Прежде чем перейти к изучению ПР, кратко рассмотрим их классификацию по назначению, приведенную на рис. 2.7.
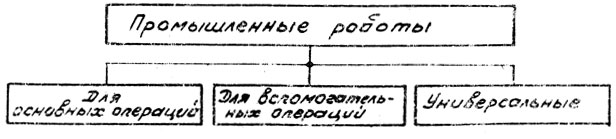
Рис. 2.7
Классификация основана на разделении всего множества ПР на три подмножества: подмножество роботов, ориентированных на выполнение основных технологических операций (сварка, покраска, сборка и т. п.), подмножество роботов, предназначенных для выполнения вспомогательных операций (поднести, унести, подать и т. п.), и подмножество универсальных роботов, которые могут быть использованы при выполнении как основных, так и вспомогательных операций.
Используя изложенное, перейдем к более подробному рассмотрению промышленных роботов.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'