13. Биоэлектрическое управление манипуляционными системами
Существенные результаты, достигнутые в области биоэлектрического управления, создают предпосылки для решения задач, связанных с использованием биоэлектрических систем для управления различными манипуляционными устройствами информационных роботов.
Как известно, любой процесс возбуждения, протекающий в живой ткани, всегда сопровождается возникновением и изменением в ней биоэлектрических потенциалов [31]. В определенных пределах существует линейная однозначная зависимость между напряжением, развиваемым мышцей, и величиной биоэлектрического потенциала.
В настоящее время достаточно подробно исследованы зависимости и свойства суммарных биосигналов, измеряемым параметром которых является мощность. Установлено, что сигналы, управляющие нервной клеткой, носят дискретный характер, т. е. сигнал в нервном волокне не возникает до тех пор, пока его величина не превысит некоторого порогового значения раздражения. При этом по нервному волокну передаются дискретные импульсы, частота которых тем больше, чем выше уровень раздражения. Вместе с тем амплитуда импульсов остается постоянной. Таким образом, по нервному или мышечному волокну сигнал распространяется в виде совокупности дискретных импульсов, частота которых зависит от уровня раздражения.
Подобные совокупности дискретных импульсов используются для управления сложными техническими устройствами.
Задача использования биоэлектрических сигналов для управления техническими устройствами сводится прежде всего к разработке эффективных методов отведения биоэлектрических сигналов, созданию методов и средств усиления и декодирования этих сигналов с целью выделения полезной информации.
Метод распознавания биоэлектрического образа позволяет нормализовать биосигналы, устанавливая для них динамический диапазон, различный для различных индивидуумов. Таким образом, можно сказать, что "программа" поведения живой материи кодируется в форме совокупности электрических импульсов; в аналогичной форме может быть запрограммирована работа технического устройства. Поэтому очевидно, что подобный метод сигнализации может быть принят в качестве общего кода для тех случаев, когда имеет место взаимодействие живого организма с техническим устройством. При этом возможны два способа взаимодействия живого организма и технического устройства и соответствующие им две различные биоэлектрические системы управления. В одних системах живой организм выступает в роли приемника управляющих сигналов, генерация которых производится техническим устройством; в других - живой организм сам является генератором сигналов, управляющих техническим устройством. В настоящее время усилия специалистов сконцентрированы на решении второго круга задач, связанных с использование биоэлектрических сигналов для управления различными техническими устройствами.
Способ биоэлектрического управления был впервые сформулирован и реализован в 1957 г. группой советских ученых [Л. 41]. Была создана биоэлектрическая система, управляющая механическим сервоприводом в соответствии с программой, вырабатываемой человеком в форме колебаний биоэлектрических потенциалов мышц. Вкратце основные выводы этих исследований были сформулированы следующим образом:
1. Колебания биопотенциалов мышц являются постоянным и неотъемлемым проявлением процесса возбуждения.
2. Возникновение биотока всегда предшествует сокращению мышцы.
3. Между величиной биопотенциала и развиваемым мышцей напряжением существует однозначное соответствие, причем до некоторого уровня напряжения это соответствие оказывается приблизительно линейным.
Выделив полезную информацию о командах, поступающих из центральной нервной системы и регулирующих уровень напряжения мышцы, и использовав ее для управления механическим сервоприводом, группа сотрудников под руководством А. Е. Кобринского доказала возможность технической реализации идеи использования биоэлектрических сигналов [Л. 42, 43].
В разработанном макете биоэлектрической системы управления оператор, управляющий с помощью сервопривода работой механизма, ведет визуальный контроль за положением последнего, и в соответствии с результатами наблюдения собственными намерениями напрягает ту или иную мышцу. Принцип биоэлектрического управления был использован в различных манипуляторных системах [Л. 31, 41, 42].
Рассмотрим этот вопрос более подробно. Проблема технической реализации биоэлектрических сигналов для целей управления включает следующие задачи:
создание эффективного метода съема биоэлектрического сигнала;
разработка методов и устройств усиления и декодирования этих сигналов для выделения поступающей из центральной нервной системы полезной информации;
создание простых и надежных технических исполнительных устройств, реализующих заданную программу действия;
разработка специальных устройств, играющих роль обратных связей между человеком и техническим устройством.
Представленное на рис. 53 устройство реагирует на нагрузку и представляет собой замкнутую электромеханическую систему с обратной связью, точно воспроизводящую некоторые характерные функции руки человека [Л. 28, 44].
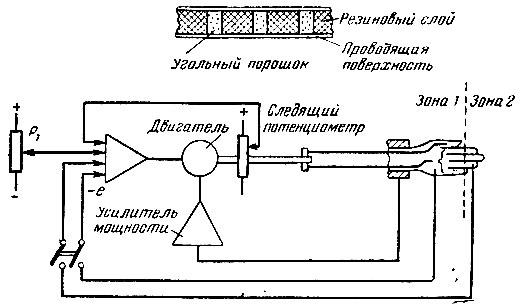
Рис. 53. Электрическая схема захватного устройства, реагирующего на нагрузку
В отличие от обычных следящих систем эта система имеет следующие особенности:
ее обратная связь работает по максимальной ошибке;
система носит недетерминированный характер, одно и то же конечное состояние может быть достигнуто разными путями;
сигнал ошибки вызывается отклонением руки от исходного нормального состояния.
Система выполняет два наиболее характерных рефлекторных действия руки человека:
удержание предмета;
автоматическое приспособление усилия сжатия к весу удерживаемого предмета.
Структура рассматриваемого устройства в основном идентична анатомическому строению руки человека. Захватное устройство автоматически адаптируется к форме находящегося в ней предмета и определяет, необходимо ли сделать хватательное или "щиплющее" движение. Усилие сжатия предмета регулируется автоматически в соответствии с его весом. Внутренняя поверхность захватывающих устройств чувствительна к прикладываемому к ней давлению. С этой целью в листе резины, образующем поверхность опоры захвата, проделывается ряд отверстий, заполняемых угольным порошком, который обычно применяется в микрофонах (рис. 53). Отверстия с обеих сторон закрываются токопроводящей металлической поверхностью. Ток, создаваемый эластичной, чувствительной к давлению поверхностью, пропорционален давлению нагрузки и площади его приложения. Поверхность захвата является источником сигнала типа "да - нет". Сигнал фиксирует момент соприкосновения предмета с захватом и вызывает реакцию его сжатия. Для того чтобы получить достаточно хорошую чувствительность, применяют резину низкой эластичности. Кроме того, поверхность захвата генерирует сигналы, пропорциональные прикладываемому давлению. Соблюдение точной пропорциональности при этом не требуется. Рассматриваемый источник управляющих сигналов существенно увеличивает возможности устройства.
Сервоусилитель имеет четыре входа. Потенциометр Р1 служит для установки начальных условий. Он размещается на предплечье так, что оператор имеет возможность управлять положением захвата, прижимая потенциометр к туловищу.
В момент нажатия захвата на какой-либо предмет поверхность, чувствительная к давлению, начинает вырабатывать сигналы управления. Если последние превосходят пороговый уровень, захват в силу действия положительной обратной связи начинает сжиматься. Благодаря разделению поверхности захвата на две зоны становится возможным определить, какое из двух движений - хватающее или "щиплющее" - необходимо. Давление на концы щупалец обусловливает ток одного направления, в то время как нажатие на поверхность захвата вызывает ток противоположной полярности. Полярность токов определяет направление вращения двигателя. "Щиплющая" (осязательная) реакция возникает при соприкосновении концов захватов с предметом; в случае только положительной обратной связи захват при соприкосновении с предметом развивал бы полную силу, что могло бы привести к деформации и разрушению многих хрупких предметов, а также к бесполезной затрате энергии. Поэтому была введена регулировка давления захвата в зависимости от веса удерживаемого предмета. Переключатель дает возможность оператору по своему усмотрению использовать устройство в качестве обычной позиционной следящей системы.
Практически важной задачей явилось создание аналога предплечья с биоэлектрическим управлением [Л. 42].
На рис. 54 представлена блок-схема биоэлектрической системы управления этого устройства.

Рис. 54. Блок-схема аналога предплечья с биоэлектрическим управлением. I - источники биоэлектрических сигналов; II - узел управления; III - узел питания; IV - узел привода; 1 - электроды; 2 - усилитель напряжения; 3 - выпрямитель; 4 - усилитель мощности; 5 - электродвигатель; 6 - редуктор; 7 и 8 - блоки питания
Исполнительный орган выполнен в виде захватного устройства, щупальцы которого замыкаются в положении щепотки. Конструкция механизма привода захвата позволяет при "схватывании" и "раскрытии" производить одновременное движение всех щупалец захвата. Управление захватом производится двумя независимыми источниками биоэлектрических сигналов, один из которых управляет "схватыванием", другой - "раскрытием". Такими источниками сигналов служат группы мышц, которые предназначены для выполнения функции сгибания и разгибания кисти и пальцев. В качестве привода используется реверсивный двигатель со специальным передаточным механизмом. Разработанный электронный узел управления обеспечивает эффективное управление мощностью исполнительного двигателя при небольшом напряжении мышцы.
Покажем еще один метод использования миопотенциалов мышц. Оператор, управляющий манипулятором, в ряде случаев должен перемещать объект по некоторой траектории и одновременно выполнять над ним сложные операции. Часто возникают ситуации, при которых оператору весьма затруднительно двигать руками, например в условиях перегрузок. Кроме того, при слежении за объектом, быстро перемещающимся в двух- или трехкоординатной системе, утомительно, а иногда и просто невозможно быстро осуществлять координированное движение рук. Во всех перечисленных случаях, вероятно, имеет смысл использовать миотоки не мышечного аппарата, а глазодвигательной системы [Л. 45]. Имеет смысл использовать поворот глазного яблока, следящего за объектом, для управления некоторыми приводами манипулятора. Поворот глазного яблока может быть измерен электроокулографическим способом. Выделенный при этом биосигнал после усиления оказывается достаточным для управления сервоприводом. Использование глазодвигательной системы для управления специальными манипуляторами может быть отнесено к перспективным направлениям развития этой области.
Приведем некоторые результаты экспериментальных исследований глаза и глазодвигательной системы слежения по одной координате. Непрерывная максимальная скорость слежения глаза доходит до 30 град/сек. При больших скоростях происходит попеременно непрерывное и скачкообразное движение. Линейная зависимость между углом поворота глаза и снимаемыми биосигналами сохраняется в пределах 30°. Повороту глаза на 1° соответствует изменение потенциала на 10-40 мв.
Как показали эксперименты, при слежении за целью, движущейся с постоянной скоростью, система глаз - мозг - глазодвигательные мышцы воспринимает закон движения и следит далее с достаточной точностью по амплитуде и фазе. Возможно даже слежение с некоторым опережением. Задержка по времени в среднем составляет 0,2 сек. При случайном входном сигнале слежение носит дискретный характер.
Если сравнить эту систему с системой глаз - мозг - рука, то последняя в режиме слежения будет иметь меньшую точность и большую задержку во времени при меньших частотах или скоростях. Во всех упомянутых случаях управление осуществляется одновременно только одним приводом. Поэтому управление движениями многозвенного манипулятора становится весьма затруднительным.
Перспективной представляется возможность управления сложным многозвенным манипулятором с помощью системы с вычислительной машиной. Однако при этом движения манипулятора должны быть заранее определены и заданы. На рис. 55 показана одна из схем системы управления многозвенным манипулятором с помощью вычислительной машины [Л. 1]. "Волевые" импульсы 1 в мозгу человека 2 преобразуются в биоэлектрические сигналы 5, которые направляются к вспомогательным мышцам 4. Миосигналы, генерируемые в мышцах 4, подаются на вычислительную машину 5, где они непрерывно сравниваются с информацией 6 относительного положения звеньев исполнительного органа 9 и сигналами состояния следящих систем 7. По этой информации вычисляются положения звеньев. Исполнительный орган манипулятора приводится в движение управляющими импульсами 8.
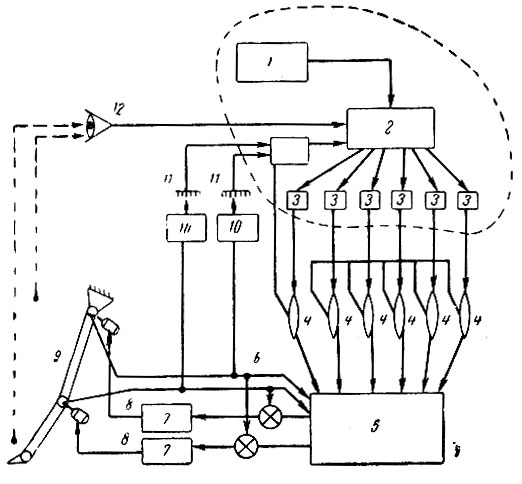
Рис. 55. Схема манипуляционного устройства с биоэлектрическим управлением с использованием вычислительной машины
Информация положений звеньев 6 преобразуется в импульсы 10, которые воздействуют на кожные рецепторы 11. Эти рецепторы направляют в мозг информацию о положениях звеньев. Следовательно, в данном случае этот тракт выполняет функцию обратной связи в биологической системе между рецепторами и нейронами. Визуальная связь 12, так же как и сенсорная, необходима для точного ориентирования захватного устройства относительно объекта.
В Белградском университете разработан аналог руки, обеспечивающий возможность рефлекторных движений [46]. В отличие от большинства существующих устройств этого типа, каждое движение которых выполняется под контролем оператора, в данном устройстве осуществляется автоматический обхват предмета в соответствии с его формой при помощи электронных "рефлексов". Для того чтобы взять двумя руками какой-либо предмет, необходимо расположить пальцы по форме предмета и произвести такую дозировку силы сжатия, которая оказалась бы достаточной для его удерживания, но меньше той, которая может привести к его разрушению. Рука человека совершает эту операцию автоматически, а рассматриваемое устройство - в два приема. Управление имитаторами рефлексов производится микровыключателями, расположенными на захватах. Перед тем как поднять предмет, оператор включает микровыключатель, установленный в предплечье. При этом все захватные устройства начинают сжиматься. Сжатие происходит до тех пор, пока захваты не приходят в соприкосновение с предметом. Прежде чем поднять предмет, необходимо увеличить дозировку силы сжатия, захватов. Варьирование силы сжатия осуществляется путем изменения мощности, подводимой к двигателю. Изменение мощности производится бицепсом руки, который воздействует на чувствительный элемент, находящийся в нарукавной повязке.
Использование биоэлектрических сигналов для управления манипуляторами весьма перспективно, так как биосигналы надежны, не подвержены влиянию силы тяжести, как постоянной, так и изменяющейся. Эти свойства могут быть использованы в случаях, когда существенное значение приобретает время реакции человека на изменение внешних условий, а также в условиях значительных перегрузок.
В США разработана система, управляемая биотоками мышц плечевого сустава, перемещающая руку вверх - вниз, наружу - внутрь [Л. 47, 48]. Биоэлектрический потенциал, возникающий на поверхности кожи при максимальном сокращении мышцы средней величины, характеризуется следующими данными: общая полоса частот от 3 до 1000 гц; частота сигналов максимальной мощности от 10 до 200 гц амплитудой от 1 до 3 мв. Оператор, стремясь переместить руку в определенном направлении, напрягает соответствующую мышцу. Возникающие при этом биоэлектрические сигналы, пропорциональные мышечному напряжению, снимаются с наложенных на мышцу плоских электродов. Эти сигналы подаются в блок фильтров и усилителей. Сигналы фильтруются, усиливаются и с помощью триггера Шмидта формируются в последовательность прямоугольных импульсов, продолжительность которых зависит от времени сокращения мышцы. Инвертор с прямо противоположным выходным импульсом и триггер Шмидта создают основу для логической матрицы двойного контроля. Последняя определяет, какая мышца совершает работу, и благодаря заложенному в системе коду задает соответствующее направление перемещению "руки". После этого сигналы поступают к исполнительному двигателю, который перемещает "руку" в соответствующем направлении. Постоянная времени системы (от момента сокращения мышцы до момента перемещения руки) не превышает 0,2 сек. В нормальных условиях перемещение руки начинается уже через несколько миллисекунд после момента сокращения мышцы. Обратная связь в системе осуществляется визуально. Система может оказать определенную помощь, если оператор одет в жесткий защитный скафандр. Подобная система может быть использована для управления различными манипуляторными устройствами.
В настоящее время в США ведутся работы по созданию специального гидроусилительного устройства, получившего название exosikeleton (внешний скелет) [Л. 49]. Это устройство, не стесняя движений оператора, должно обеспечить возможность манипулирования с предметами большого веса. Шарнирные соединения системы компактны, просты, легки и надежны. Каждое из соединений снабжено одним или несколькими сервоприводами. Управление последними осуществляется биосигналами, генерируемыми соответствующими мышцами, участвующими в выполнении определенных движений. В настоящее время исследуется возможность создания экзоскелетона, шарнирные соединения которого снабжены гидроприводами, развивающими необходимые моменты и мощности. При этом движения оператора, облаченного в экзоскелетон, должны соответствовать естественным движениям человека, выполняющего подобные операции без биоусилительной системы. Крепление системы, имеющей около 50 шарнирных соединений различного назначения, к телу человека производится с помощью ремней, которые, во-первых, заставляют элементы системы повторять движения оператора и, во-вторых, оказывают оператору помощь в координации движений.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'