Глава 1. Эволюция роботов и искусственного интеллекта
1. Что такое роботы?
Около полувека назад чешский писатель Карел Чапек написал пьесу "РУР" ("Россумские универсальные роботы"), персонажами которой были люди и роботы, т. е. искусственные люди. Один из героев пьесы, генеральный директор компании "РУР", отвечая на вопрос "что такое роботы?", говорит: "Роботы - это не люди, ... они механически совершеннее нас, они обладают невероятно сильным интеллектом, но у них нет души". Так впервые появилось новое понятие "робот", которое вскоре стало играть важную роль не только в фантастической литературе, но и в науке и технике.
Основными чертами роботов являются их "механическое совершенство" и "невероятно сильный интеллект". Благодаря этим качествам роботы способны работать и совершенствоваться как люди. В пьесе "РУР" роботы, первоначально созданные для замены людей на заводах, вскоре вышли из-под контроля людей и принялись уничтожать своих создателей. Драматическими средствами К. Чапек иллюстрирует мысль о том, что "продукт инженерной мысли может быть технически гораздо совершеннее продуктов природы".
Фантастические образы и идеи К. Чапека во многом предвосхитили тенденции научно-технического прогресса, который уже в начале 60-х годов привел к созданию универсального автомата, снабженного механической рукой, с броским названием "промышленный робот". В настоящее время создано и широко используется большое семейство таких роботов, заменивших людей на опасных для здоровья и тяжелых физических работах. Процесс эволюции роботов привел в последние годы к созданию первых образцов очувствленных и интеллектуальных роботов.
Что же такое роботы? Каково научно-техническое содержание этого термина? Как отличить роботы от других автоматических систем?
Структурная схема робота, взаимодействующего" с окружающей средой, представлена на рис. 1. Робот в общем случае состоит из следующих систем:
- информационно-измерительной (сенсорной) системы;
- управляющей системы;
- системы связи с человеком или другими роботами;
- исполнительной (моторной) системы.
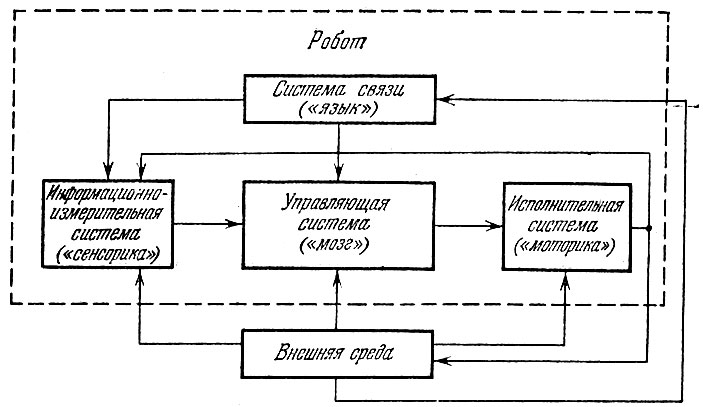
Рис. 1. Структурно-функциональная схема робота
Информационно-измерительная, или сенсорная, система - это искусственные органы чувств робота. Они, как и органы чувств человека, предназначены для восприятия и преобразования информации о состоянии внешней среды и самого робота в соответствии с потребностями управляющей системы, играющей роль "мозга" робота. В качестве элементов сенсорной системы робота обычно используются телевизионные и оптико-электронные устройства, лазерные и ультразвуковые дальномеры, тактильные и контактные датчики, датчики положения, тахометры, акселерометры и т. п.
Управляющая система, или "мозг", робота служит для выработки закона управления приводами (двигателями) механизмов исполнительной системы на основе сигналов обратной связи от сенсорной системы, а также для организации общения робота с человеком на том или ином языке. "Мозг" роботов обычно реализуется на базе управляющих ЭВМ, имеющих большой ассортимент входных и выходных преобразователей и каналов связи (от нескольких десятков до нескольких тысяч), по которым, как по нервной системе, могут передаваться дискретные и непрерывные сигналы. Управляющие ЭВМ для роботов строятся в малогабаритном, транспортабельном исполнении и обладают, повышенной надежностью. Интеллектуальные способности робота определяются главным образом алгоритмическим и программным обеспечением его управляющей системы.
Система связи робота необходима для организации обмена информацией между роботом и человеком или другими роботами на некотором понятном им языке. Цель такого обмена - формулировка человеком заданий роботу, организация диалога между человеком и роботом, контроль за функционированием робота, диагностика неисправностей и регламентная проверка робота и т. п. Обычно информация от человека поступает к роботу через устройство ввода или пульт управления. При этом чаще всего используются физические воздействия (нажатие человеком кнопки или клавиши, ключа телеграфного аппарата, перемещение педалей, вращение рулевого колеса и т. п.). Однако в последнее время начинает все шире применяться речевое общение, а также ввод информации с помощью биопотенциалов (биоуправление). Что касается информации, поступающей от робота к человеку, то она, как правило, имеет форму световых и звуковых сигналов. Носителями этой информации являются разного рода табло, цифровые индикаторы, дисплеи, телекамеры и т. п. Следует отметить, однако, что возможности связи робота с человеком не ограничиваются перечисленными средствами общения. В настоящее время имеются все основания надеяться, что в ближайшем будущем станет возможным общение с роботом (и с вычислительной машиной вообще) на естественном человеческом языке.
Исполнительная система, определяющая "моторику" робота, т. е. его способности совершать разнообразные движения, служит для отработки управляющих сигналов, формируемых управляющей системой, и воздействия на окружающую среду. В качестве исполнительных систем обычно используются механические руки (манипуляторы), механические ноги (педипуляторы), самоходные тележки, синтезаторы речи, графопостроители, а также их различные комбинации.
Когда говорят о роботах, то чаще всего представляют себе нечто "человекообразное", физически воздействующее на окружающие объекты и преобразующее их. Так, манипулятор робота подобно человеческой руке способен огибать препятствия и осуществлять разнообразные и сложные операции ("взять", "перенести", "повернуть", "собрать" и т. п.) с различными предметами. Шагающий робот может передвигаться по незнакомой местности со сложным рельефом (горная местность, дно океана, поверхность Луны и т. п.), преодолевая препятствия. Все это - примеры физических операций, совершаемых тем или иным роботом.
А способен ли робот, как и человек, совершать интеллектуальные (умственные) операции?
На этот вопрос, породивший многочисленные дискуссии, следует ответить утвердительно. В самом деле, умственные операции, хотя и не производят никаких реальных (физических) воздействий на окружающие" объекты, преобразуют образы этих объектов и связанные с ними понятия. Например, человек, взглянув на некоторый объект (скажем, карандаш, лежащий на столе), может мысленно ("про себя") "взять, перенести и положить" его в другом месте (скажем, на стол). Это значит, что произошло, во-первых, распознавание реального объекта, и во-вторых, воздействие на имеющийся в мозгу человека образ ситуации: вначале была одна "картина", а затем стала совершенно другая, т. е. налицо преобразование, но не реальной ситуации, а ее образа. Совершенно аналогично может функционировать и робот. Воспринимая объекты окружающего мира с помощью сенсорной системы, он формирует в памяти управляющей системы образы этих объектов. Далее с помощью человека или автоматически робот может, как мы увидим ниже, обучаться понятиям и навыкам, а также формировать в своей памяти модель окружающей среды. Благодаря этому робот оказывается потенциально способным совершать такие операции, которые у человека считаются связанными с мышлением. Примерами подобного рода операций являются планирование поведения, распознавание образов, принятие решений в условиях неопределенности и т. п.
Следует отметить, однако, что новенький, только что с завода-изготовителя, вполне исправный робот не может реализовать ни одной операции и, следовательно, не может решить ни одной задачи. Для того чтобы "вдохнуть душу в безжизненное тело" робота, необходимо создать алгоритмы и программы для решения возникающих перед роботом задач, т. е. снабдить робота соответствующим алгоритмическим и программным обеспечением.
Иногда говорят, что человек, создающий необходимое алгоритмическое и программное обеспечение, обучает робота решению задач. При этом рассуждают примерно так: "Что такое обучение? Это - сообщение обучаемому некоторой информации. Человек сообщает роботу информацию о методе решения задачи. Значит, он учит робота".
Однако далеко не любой способ введения информации принято называть обучением. Например, совершенно бессмысленно считать обучением процесс создания робота на заводе, хотя, конечно, в его конструкцию вкладывается определенная информация. Чтобы разобраться в этом вопросе, рассмотрим, как протекает процесс обучения у людей.
Чего хочет добиться учитель, когда обучает ученика решению некоторой задачи? Цель учителя - изменить определенным образом состояние тех клеток мозга ученика, которые "ответственны" за решение. Прямой путь достижения цели состоял бы в непосредственном воздействии (например, с помощью введения химических веществ или пропускания электрического тока) на те именно клетки, состояние которых необходимо изменить. Но учитель этого не делает. Вместо воздействия на клетки мозга, участвующие в процессе решения задачи, учитель воздействует на органы чувств ученика. Он что-то ему показывает, что-то говорит, и эти косвенные воздействия вызывают уже необходимые изменения в клетках мозга.
Такой способ по сравнению с первым предполагает гораздо более сложное устройство мозга. Предъявляя достаточно суровые требования к ученику, этот способ требует существенно меньше знаний от учителя. В самом деле, для обучения путем непосредственного воздействия на клетки мозга учитель должен детально знать, как устроен мозг. Более того, он должен знать, какие воздействия на клетки могут перевести их в желаемое состояние, а также иметь физическую возможность оказать такие воздействия на многие миллионы клеток. Ясно, что ни один учитель не обладает такими возможностями. Поэтому он обучает ученика путем воздействия на его органы чувств.
Не следует, однако, думать, что природа забраковала способ передачи информации на клеточном уровне. В действительности он широко распространен. Но в этом случае принято называть тех, кто поставляет информацию, не учителями, а родителями. Родители хранят информацию не в виде состояния клеток мозга, а в виде генетического кода хромосом. Поэтому свою информацию родители не могут выразить словами, зато имеют возможность построить по хранимому в хромосомах коду (плану) организм ребенка.
Вернемся теперь к обучению робота. Человек может передавать информацию роботу как путем непосредственного ее занесения в память управляющей системы, так и путем воздействия через искусственные органы чувств.
В первом случае человек точно знает, какие алгоритмы реализует та или иная подпрограмма и где она находится в памяти робота. Сила человека в том и заключается, что он может заложить любую информацию в любую ячейку памяти и заставить робота выполнить любую (разумеется, в пределах его функциональных возможностей) последовательность операций. Во втором случае человек, как и учитель, не осуществляет непосредственного вмешательства в произвольную часть памяти робота. Он воздействует лишь на искусственные органы чувств робота, например, путем показа определенных объектов. В ходе такого обучения управляющая система сама изменяет свои параметры и структуру. К моменту начала эксплуатации робота параметры и структура управляющей системы не совпадают с теми, которые были до обучения. В частности, они зависят от взаимодействия робота с окружающей средой при обучении (например, от того, какие объекты были показаны роботу во время обучения). Образно говоря, робот в процессе обучения строит внутри себя (точнее, в памяти управляющей системы) модель внешнего мира. При этом он существенно использует информацию, получаемую с помощью искусственных органов чувств. Заметим, что этой модели не было в мозгу человека-учителя*.
* (На самом деле человек всегда имеет в мозгу свою информационную модель той среды, в которой он живет. В этой динамичной модели реальные предметы, их свойства и отношения между ними не только отображаются, но и преобразуются. Это позволяет человеку находить в окружающих предметах те их свойства, которые необходимы для удовлетворения потребностей человека, для обеспечения его жизни и деятельности. С помощью способности строить информационную модель внешнего мира человек может испробовать "про себя", т. е. мысленно, тот или иной вариант поведения прежде, чем он приступит к его осуществлению. В этом колоссальная биологическая роль построения "внутренней модели внешнего мира".)
Таким образом, мы убеждаемся, что человек наградил свое детище (как родители - ребенка) не столько знаниями, сколько способностью обучаться или даже самообучаться. Благодаря этой способности робот может получать информацию (знания) как от человека, так и самостоятельно в процессе взаимодействия с окружающей средой. Любопытно, что учителя робота (человек или внешняя среда) могут не иметь сведений об устройстве его "мозга". В ходе обучения или самообучения робот строит в своем "мозгу" модель внешней среды. Эта модель может весьма существенно отличаться от аналогичной модели в мозгу человека.
Естественно возникает вопрос: может ли робот знать больше своего создателя? Ответ на него очевиден: во время обучения в процессе активного взаимодействия со средой робот, по существу, ведет экспериментальную работу. Неудивительно, что результаты этих экспериментов могут быть новыми и для человека.
Важно отметить, что именно способность к обучению путем активного взаимодействия с реальным миром отличает роботов от разного рода автоматов и программ, служащих для автоматизации тех или иных операций. Если программы, реализуемые на вычислительных машинах, имеют дело лишь с символьными системами переработки информации, то роботы обязаны, используя свои искусственные органы чувств, соотносить эти символьные системы с реальным физическим миром и воздействовать на него с помощью исполнительных механизмов.
Что же касается обычных автоматов, то они предназначены главным образом для многократного выполнения одной и той же операции. В связи с этим подобного рода автоматические устройства проектируются таким образом, чтобы надежно выполнять в течение всего срока эксплуатации ту и только ту операцию, для автоматизации которой они служат. Поэтому применение автоматов, имеющих жесткую структуру, целесообразно и экономически выгодно только при многократном повторении операции. Такие условия складываются, например, при массовом производстве. Типичными примерами автоматов являются станки-автоматы, автоматы для размена монет, автоматы по продаже билетов и газет и т. п. Нас подобного рода автоматы интересовать не будут.
В отличие от автоматов роботы - это универсальные автоматические системы многоцелевого назначения. Роботы могут решать разнообразные задачи из различных областей*. Автоматизация технологических операций, требующих ручного труда, транспортировка грузов на местности со сложным рельефом, распознавание и анализ ситуаций - всем этим (и многим другим) занимаются роботы. Как уж тут не назвать их универсальными!
* (Необходимо различать решение конкретной задачи и серии задач определенного типа. Например, автоматы имеют дело с конкретной задачей - той жесткой операцией, для которой они служат. Решение серии задач - это единое предписание (метод, алгоритм), позволяющее решать любую конкретную задачу данной серии задач. Роботы имеют дело с сериями (классами) задач.)
Универсальность роботов определяется совершенством их управляющей системы, а также разнообразием искусственных органов чувств и исполнительных механизмов. Роботы способны не только выполнять много разных операций (задач), но и оперативно переобучаться с одной операции (задачи) на другую. При этом если даже каждая операция выполняется роботом по жесткой программе, обязательно имеются средства быстрой перестройки программы на другие операции в пределах функциональных возможностей робота. Обычно это осуществляется, как мы увидим в дальнейшем, путем обучения робота человеком. Важно отметить, однако, что возможны (и уже интенсивно разрабатываются) более совершенные роботы, которые способны не только эффективно обучаться, но и самообучаться и адаптироваться (приспосабливаться) к неизвестной обстановке, а также автоматически распознавать и анализировать ситуации, планировать свое поведение, самостоятельно принимать решения и вести диалог с человеком.
Сенсорные возможности робота определяются разнообразием и характером искусственных органов чувств, позволяющих имитировать восприятия. "Моторика" робота определяется числом степеней свободы исполнительных механизмов, а также их конструкцией. Заметим, что, например, полнота имитации движений руки манипулятором зависит от числа звеньев и характера их сочленения. При этом кинематическая схема манипулятора и схвата может сильно отличаться от конструкции руки и кисти. В частности, широко применяются манипуляторы, у которых с помощью специальных телескопических устройств изменяется длина звеньев. Вместо ног у роботов зачастую используются колеса, гусеницы или педипуляторы (механические ноги), конструкция которых зачастую далеко не антропоморфна. Тем не менее кинематические и динамические характеристики исполнительных механизмов робота могут значительно превосходить таковые у человека.
А какой должна быть внешность робота? Когда человек создает робота - сильного, ловкого и умного слугу и помощника в его делах, вовсе нет необходимости в том, чтобы этот слуга и помощник был внешне похож на человека. Ведь в конечном счете важно не то, как он выглядит, а как исполняет возложенные на него обязанности. Нужно ли, например, чтобы трактор - "стальной конь" - был похож своим внешним видом на живой прототип? Или, скажем, чтобы автомат для продажи газет имел внешность миловидной продавщицы? Отсюда становится понятной вся нелепость требования, чтобы робот был обязательно "человекоподобным", хотя создание "человекоподобных" роботов, разумеется, возможно.
Резюмируя вышеизложенное, мы можем теперь дать определение робота. Роботами называются универсальные автоматические системы, способные обучаться в процессе активного взаимодействия с окружающей средой и предназначенные для имитации разнообразных операций, совершаемых человеком в процессе физического или умственного труда. Конкретная конструкция такой системы не имеет значения, лишь бы в ее структуре были изображенные на рис. 1 системы: сенсорная, управляющая, моторная и связи с человеком.
Таким образом, отличительными чертами роботов является их универсальность, способность к обучению и адаптации в процессе восприятия (с помощью искусственных органов чувств) и воздействия на окружающую среду (с помощью исполнительных механизмов), а также многоцелевое назначение, связанное с автоматизацией физической и интеллектуальной деятельности человека. Благодаря этим качествам роботы могут выполнять те виды физической или интеллектуальной работы, которые принципиально или по экономическим соображениям не могут быть механизированы или автоматизированы другими, традиционными техническими средствами. Вследствие этого область возможных применений роботов чрезвычайно широка.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'