4. Классификация роботов
В зависимости от степени участия человека в процессе управления роботы подразделяются на два класса: биотехнические и автономные, или автоматические, роботы. К биотехническим роботам относятся дистанционноуправляемые копирующие роботы, экзоскелетоны, роботы, управляемые человеком с пульта управления, и полуавтоматические роботы. Охарактеризуем кратко принципы управления роботами.
Копирующие роботы имеют задающий орган (обычно манипулятор), полностью идентичный исполнительному (с определенным масштабом по геометрическим размерам и усилиям), средства передачи сигналов прямой и обратной связи, а также средства отображения для человека-оператора среды обитания робота. Управляющая система строится так, что желаемое движение задающего органа, задаваемое человеком-оператором, полностью копируется с точностью до масштабного коэффициента исполнительным органом. Для этой цели по каждой обобщенной координате обычно применяются следящие системы двустороннего действия, использующие обратную связь по усилиям или моментам, возникающим при роботе исполнительного органа.
Экзоскелетоны - это антропоморфные конструкции, которые обычно "одеваются" на руки, ноги или корпус человека и служат для воспроизведения (копирования) их движений с некоторым масштабным коэффициентом по усилиям. Экзоскелетоны зачастую имеют несколько десятков степеней свободы. Они, как и копирующие роботы, управляются человеком-оператором с помощью следящих систем двустороннего действия.
Следующая разновидность роботов с биотехническим управлением - это роботы, управляемые человеком с пульта управления. На пульте управления таких роботов имеется система кнопок, клавиш или рукояток, связанных с исполнительными механизмами каналов управления по различным обобщенным координатам. Кроме того, на пульте управления имеются средства отображения информации о среде функционирования робота, поступающей к человеку обычно по радиоканалу связи. Желаемое движение роботу задается человеком с пульта управления через систему исполнительных приводов.
Наконец, полуавтоматические роботы - это такие роботы, в которых ручное управление сочетается с автоматическим. Они находят широкое применение в тех случаях, когда невозможно заранее жестко запрограммировать все операции, которые робот должен выполнять, и в то же время экономически нецелесообразно или технически невозможно этот робот оснастить всеми требуемыми искусственными органами чувств и элементами искусственного интеллекта. К полуавтоматическим относятся роботы с супервизорным управлением, когда человек-оператор вмешивается в процесс автономного функционирования робота не посредством перехода на ручное управление, а путем сообщения ему дополнительной информации (например, с помощью целеуказания, указания требуемой последовательности действий и т. п.).
Другой важный класс роботов - это роботы с автономным, или автоматическим, управлением. Такие роботы после их создания и наладки в принципе могут функционировать и без участия человека (исключая, быть может, лишь профилактический контроль и ремонт). Типичным примером автономных роботов являются роботы с элементами искусственного интеллекта.
В зависимости от назначения и решаемого класса задач можно выделить следующие основные разновидности роботов: производственные роботы и исследовательские роботы. На рис. 2 представлена эволюционная классификация роботов трех поколений в зависимости от области их применений. Рассмотрим более подробно эту классификацию.
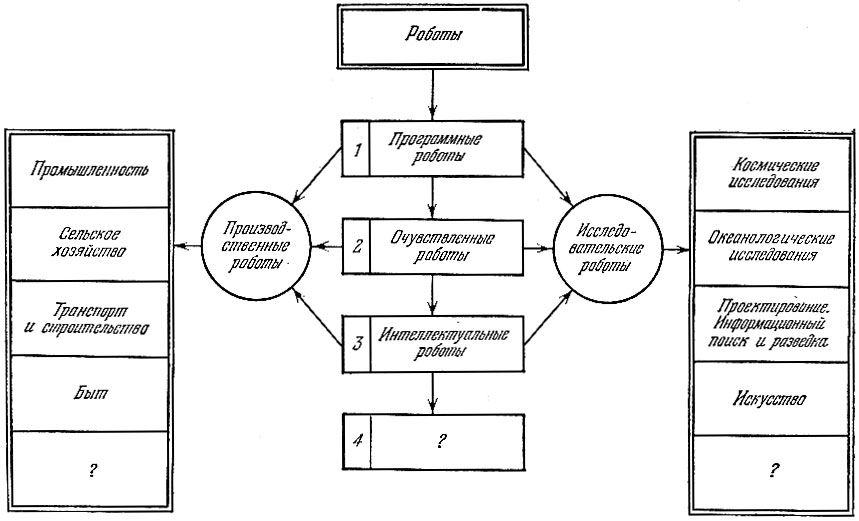
Рис. 2. Эволюционная классификация роботов
Производственные роботы - это роботы, предназначенные для выполнения тяжелой, монотонной, вредной и опасной для здоровья людей физической работы. Для этой группы роботов характерно наличие автоматических исполнительных устройств, таких, как манипуляторы, имитирующие движения рук человека, самоходные тележки с различными типами шасси и т. п. Конкретизация областей применения производственных роботов приводит нас к следующим разновидностям: промышленные, сельскохозяйственные, транспортные, строительные и бытовые роботы.
Промышленные роботы предназначены в основном для автоматизации всех видов ручных и транспортных операций в различных отраслях промышленности. Наибольшее применение роботы нашли в машиностроении и приборостроении, в горнодобывающей, нефтехимической, металлургической и атомной промышленности.
Поскольку современное строительство приближается по степени и стилю механизации к промышленности, оно представляет собой важную и благодатную область для применения роботов. Строительные роботы позволят автоматизировать огромное количество ручных операций как вспомогательных, так и основных, органически присущих строительному делу. Актуальность роботизации строительства очевидна.
Сельскохозяйственные роботы предназначены для автоматизации трудоемких и монотонных процессов в сельском хозяйстве. В настоящее время начинается интенсивная разработка таких роботов, знаменующих начало роботизации сельскохозяйственного производства.
Транспортные роботы предназначены для автоматизации управления различными транспортными средствами. Примерами транспортных роботов являются самоходные тележки, шагающие аппараты, автопилоты и авторулевые. Много говорят сейчас и о бытовых роботах: Такие роботы служат для автоматизации операций, связанных с бытом человека и с богатой разнообразием сферой его обслуживания. Далеко не все операции в этой сфере можно поручить обычным автоматам. Здесь нужны более гибкие и универсальные системы, - бытовые роботы. Эти роботы должны мыть посуду, стирать, натирать полы, готовить пищу и т. п.
Второй класс роботов - это исследовательские роботы. Они служат для поиска, сбора, переработки и передачи информации об исследуемых объектах. К числу таких объектов относятся космическое пространство, поверхности планет, подводное пространство, подземные полости (шахты, пещеры и т. п.). Арктика и Антарктика, пустыни, зараженная местность и другие труднодоступные для человека области.
Резюмируя вышеизложенное, отметим, что современная робототехника представляет собой гармоничное сочетание роботов различных типов и поколений, которые возникли в связи с потребностями научно-технического прогресса и взяты им на вооружение.
Удобные фильтры на https://markssm.date помогут найти идеальную девушку. | На sp-stm.ru модульная котельная на отработке нефти.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'