3. Особенности эксплуатации
Рассмотрим теперь кратко вопросы эксплуатации программных роботов. В качестве типичного примера возьмем широко распространенный промышленный манипуляционный робот "Юнимейт" (рис. 3).
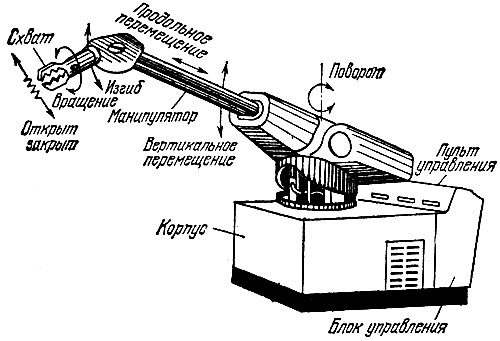
Рис. 3. Манипуляционный робот 'Юнимейт'
Конструкция "Юнимейта" включает многозвенный манипулятор, схват, блок программного управления, пульт управления, энергетический блок и корпус, в котором смонтированы все агрегаты робота, включая исполнительные приводы.
Манипулятор робота имеет шесть степеней свободы; схват может открываться и закрываться. Приводы манипулятора - гидравлические, а привод схвата - пневматический. Максимальный вылет (радиус действия) манипулятора составляет 2,5 м. Вертикальное перемещение схвата при полном вылете манипулятора лежит в пределах 0,07-2,3 м (от уровня пола), а объем рабочей зоны достижимости составляет примерно 10 м3. Точность позиционирования схвата равна 1,5 мм. Максимальное усилие зажима детали схвата клещевого типа при длине "пальцев" 0,1 м составляет около 130 кгс. Средняя стоимость роботов типа "Юнимейт" вместе с комплектующими деталями - 25000 долларов.
Управление манипулятором осуществляется посредством кнопок и переключателей на панели блока программного управления или с помощью пульта ручного управления, на котором имеется ряд ручных переключателей, позволяющих после нажатия кнопки обучения (записи) выполнять следующие операции:
- перемещение манипулятора "вверх" и "вниз";
- возвратно-поступательное движение манипулятора "вперед" и "назад";
- поворот манипулятора "вправо" и "влево";
- движение схвата "вверх" и "вниз";
- движение схвата "вправо" и "влево";
- "зажим" и "разжим" схвата.
В режиме обучения человек-оператор при помощи кнопок и переключателей пульта ручного управления осуществляет желаемое (программное) движение манипулятора и схвата. При этом сигналы с выходов кодовых датчиков положения, характеризующие текущую конфигурацию манипулятора, записываются в запоминающем устройстве на магнитный барабан (объем памяти - 16000 бит).
В режиме эксплуатации манипулятор и схват управляются замкнутой позиционной системой управления путем последовательного считывания с магнитного барабана ранее записанной программы с помощью специальных считывающих головок. Максимальное число последовательных конфигураций (позиций) у робота "Юнимейт" равно 180. Коды программной (желаемой) позиции с магнитного барабана и коды фактического (текущего) положения манипулятора с выхода кодовых датчиков поступают на сравнивающее устройство, формирующее сигналы рассогласования. Сигналы рассогласования приводят в действие сервоклапаны (золотники), которые включают в действие гидроприводы манипулятора. Переход к следующему шагу программы происходит при соблюдении следующих условий: нулевое рассогласование сигналов программного и фактического положения манипулятора на выходе сравнивающего устройства, а также получение внешних сигналов об исполнении команд и окончании отводимого на них времени задержки. Так в роботе "Юнимейт" реализуется замкнутая схема управления, принцип действия которой по одной из обобщенных координат манипулятора иллюстрируется рис. 4.
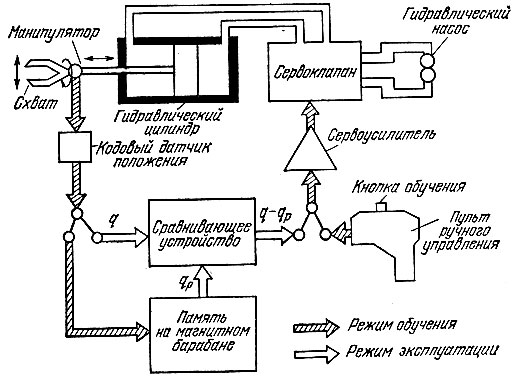
Рис. 4. Функциональная схема управления 'Юнимейта'
Важно отметить, что, кроме программы управления движением манипулятора, на магнитный барабан робота "Юнимейт" могут быть записаны команды управления оборудованием, с которым взаимодействует робот.
С целью сокращения затрат на обучение и настройку робота фирма "Юнимейт" разработала в последние годы библиотеку программ, соответствующих различным технологическим операциям. Эта библиотека состоит из комплекта магнитных лент, на которых записаны программы, хорошо зарекомендовавшие себя на практике. С помощью специального устройства любая из этих программ может быть быстро переписана в память робота на магнитном барабане. Таким образом, в ряде случаев отпадает необходимость в обучении робота с помощью человека-оператора. Достаточно обратиться к библиотеке стандартных программ движения.
Совершенно аналогично устроены и функционируют многие другие роботы первого поколения. Примерами таких роботов являются манипуляционные роботы типа "УМ", "ПР-10", "Универсал" (СССР), "Версатран" (США), "А-3" (Швеция), "Транс" (Япония). Основные технические характеристики некоторых роботов первого поколения представлены в табл. 1 и 2.
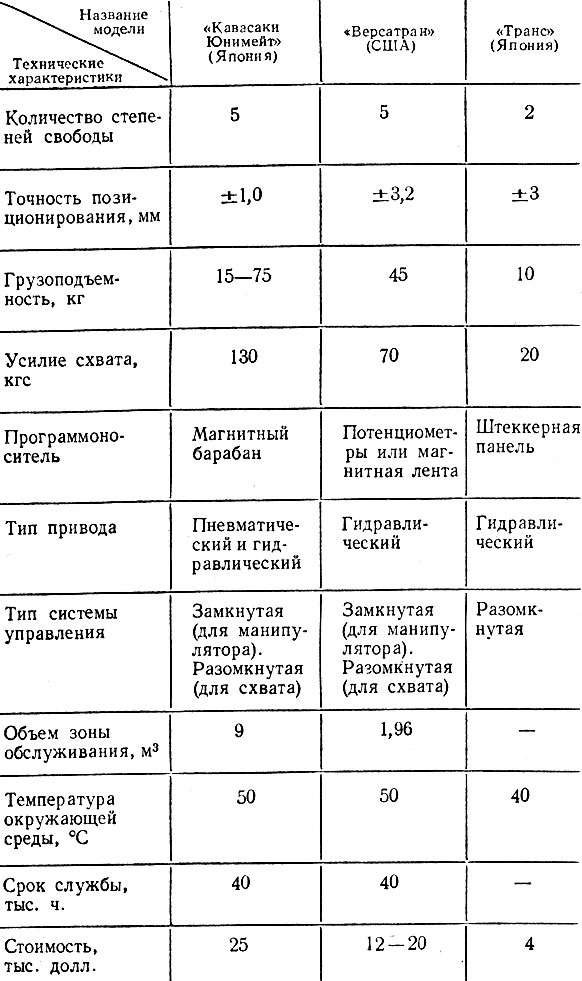
Таблица 1
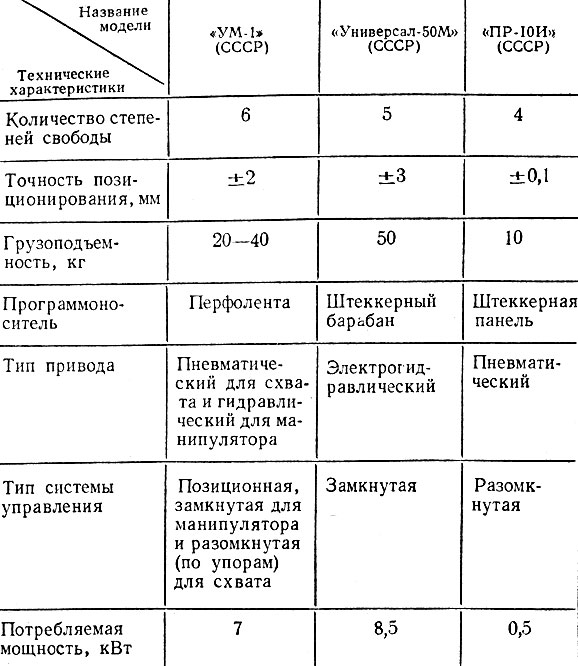
Таблица 2
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'