2. Управление с обратной связью
Методы управления очувствленными роботами основаны на принципе обратной связи. Согласно этому принципу закон управления, формируемый управляющей системой, является функцией текущих состояний робота и внешней среды, измеряемых искусственными органами чувств. Последние и служат источниками сигналов обратных связей, позволяющих, в частности, в каждый момент времени определять величину отклонения между реальным и программным движением робота, обстановку в окружающей робота среде и т. п.
Управляющая система очувствленного робота решает две основные задачи: первичную обработку и анализ информации, поступающей от искусственных органов чувств, и собственно управление исполнительными приводами с использованием обратной связи через органы чувств робота. Для решения этих задач уже невозможно ограничиться только запоминающим и программирующим устройством, как в роботах первого поколения.
Из каких же устройств состоит управляющая система очувствленного робота? Как они взаимодействуют между собой, а также с другими системами робота? Ответ на эти вопросы позволит нам выявить отличительные черты управления роботами второго поколения.
Прежде всего заметим, что управляющая система очувствленного робота состоит из управляющей ЭВМ, которая вырабатывает закон управления исполнительными приводами. Структуру и принцип действия исполнительных приводов (в качестве которых обычно используются следящие приводы) мы уже рассмотрели в предыдущей главе. Поэтому сейчас наша ближайшая цель состоит в том, чтобы для читателя-неспециалиста разъяснить, что такое ЭВМ и как они работают.
В начале 50-х годов появились вычислительные машины с гибким программным управлением. Этот термин отражал возможность изменять алгоритм (программу вычислений) в ходе, вычислений. Эта возможность в свою очередь связана с возможностью хранить в памяти машины программу вместе с исходными данными.
Гибкое программное управление - это, пожалуй, главное, что отличает современные ЭВМ, или компьютеры, от механических и электронных вычислителей и автоматов прошлого. Именно отсутствие этого важного качества заставило последние уступить свои позиции программно управляемым ЭВМ.
Всякая ЭВМ состоит из следующих основных устройств.
Запоминающее устройство, или память, служит для хранения всех необходимых сведений (включая и алгоритм), записанных на специальном языке ЭВМ. Заметим, что вместо обычного графического изображения символов, различаемых друг от друга по их начертанию, в ЭВМ символы "машинного" алфавита, который обычно состоит из двух символов 0 и 1, представляются некоторыми отличными друг от друга физическими состояниями (например, различными электрическими напряжениями или различными состояниями намагничивания). Такой двоичный алфавит удобен по целому ряду соображений и, в частности, потому, что логические операции совершаются над переменными, могущими принимать два значения: "ложно" (0) и "истинно" (1).
Память делится на ячейки, или слова, состоящие из конечного числа разрядов, каждому из которых соответствует одно из двух состояний (0 или 1) реализующего его физического элемента. В разрядах машинного слова могут храниться числа, команды программы или другая символьная информация, смысл которой определяется задачей, в которой эта информация используется.
Запоминающее устройство подразделяется на внешнее - большая по объему, но "медленная" память, и внутреннее - "быстрая" (оперативная) память небольшого объема. Так, например, для того чтобы добраться до одного числа, хранящегося во внешней памяти (на магнитной ленте) ЭВМ серии БЭСМ, надо затратить в 1000000 раз больше времени, чем при считывании того же числа из оперативной памяти (на ферритовых сердечниках).
Устройство управления умеет расшифровывать инструкции (команды) программы, поступающие из оперативной памяти, и управляет работой других устройств ЭВМ. Именно оно следит за соблюдением последовательности выполнения команд, правильностью их исполнения, организует потоки информации внутри машины и координирует работу всех ее устройств. Образно говоря, управляющее устройство действует как автоматическая телефонная станция, объединяющая тех "абонентов" (устройства и ячейки памяти), которые участвуют при исполнении данной отдельной операции (команды).
Арифметическое устройство предназначено для преобразования информации путем выполнения простейших арифметических и логических операций над содержимым ячеек памяти.
Несмотря на то, что основной объем переработки информации ложится на арифметическое устройство, по объему оборудования всей ЭВМ в целом оно занимает обычно лишь 10-20%. Мы приводим эти цифры для того, чтобы подчеркнуть ту мысль, что современную ЭВМ нельзя рассматривать просто как гигантский арифмометр. Это сложная система взаимодействия центрального процессора (совокупности запоминающего, управляющего и арифметического устройств) с внешними, или периферийными, устройствами ввода и вывода информации.
Таковы основные устройства любой ЭВМ многоцелевого назначения. Однако ЭВМ, используемые в роботах, имеют свою специфику. Они служат для преобразования поступающей от искусственных органов чувств информации в управляющие сигналы исполнительных приводов робота. Поэтому они снабжаются большим числом разнообразных преобразователей и каналов связи (от нескольких десятков до нескольких тысяч), по которым могут передаваться не только цифровые (дискретные), но и аналоговые (непрерывные) сигналы, представленные напряжением (от микровольт до сотен вольт), силой тока, фазой, частотой и т. п. ЭВМ может опрашивать сенсорные датчики, присоединенные к ее входным каналам, и выдавать управляющие сигналы на исполнительные приводы через выходные каналы.
Нужно подчеркнуть, что сама по себе управляющая ЭВМ "мертва". Чтобы она "ожила" и стала решать те задачи, которые перед роботом ставит человек, необходимо оснастить ее соответствующими алгоритмами и реализующими их программами. После того, как программы введены в память, ЭВМ начинает работать чисто автоматически, без всякого вмешательства человека. Можно сказать, что ЭВМ руководствуется в своей работе именно заложенными в нее программами. Отсюда ясны роль и значение алгоритмического и программного обеспечения управляющей ЭВМ в "жизни" очувствленного робота.
В чем принципиальное различие между алгоритмическим и программным обеспечением робота? Дело в том, что даже в том случае, когда различные роботы решают или способны решать одну и ту же задачу (в соответствии с некоторым заданным алгоритмом), это вовсе не значит, что они ее решают одинаковым способом (по одной и той же программе). Это замечание относится как к различным роботам одного и того же типа, так и к представителям разного типа роботов. Например, процесс, протекающий в роботах с последовательно работающим центральным процессором ЭВМ, складывается из последовательно (шаг за шагом) реализуемых операций, каждая из которых затрагивает лишь небольшую часть устройств робота. Для роботов с параллельно работающим процессором, наоборот, характерна высокая степень распараллеливания процесса, т. е. одновременное и согласованное выполнение многих операций "повсеместно" в различных системах робота.
Перейдем теперь к описанию структуры и функционирования управляющей системы очувствленного робота. Она имеет трехуровневую структуру. На верхнем уровне иерархии осуществляется анализ ситуаций с целью определения, к какому классу принадлежит текущая ситуация, воспринимаемая искусственными органами чувств. Здесь же производится планирование операций и выбор "действия", адекватного тому классу, которому принадлежит текущая ситуация. На среднем уровне в соответствии с этим "действием" (планом операций) формируется программное движение, т. е. желаемый закон изменения обобщенных координат исполнительных механизмов с учетом препятствий и ограничений. На нижнем уровне строится закон управления исполнительными приводами, обеспечивающими осуществление программного движения. В качестве приводов обычно используются следящие приводы. Последние проектируются таким образом, чтобы обеспечить устойчивость программного движения исполнительных механизмов робота по отношению к действию разного рода возмущений. Благодаря этому реальное движение робота оказывается близким к его программному движению.
Рассмотрим более подробно вопрос о формировании связей (подпрограмм) "класс ситуаций - действие", лежащих в основе работы верхнего и среднего уровней иерархии управляющей системы очувствленного робота. Прежде всего уточним, что под текущей ситуацией мы понимаем значение сигналов на выходе сенсорной системы, а под классом ситуаций - множество их, обладающее тем свойством, что все текущие ситуации из одного и того же класса требуют одного и того же "действия". Такое "действие" будем называть адекватным текущей "ситуации". "Действию" соответствует некоторое программное движение робота, которое, будь оно осуществлено, гарантирует точное выполнение этого "действия". Связи "класс ситуаций - действие" могут либо заранее закладываться в память управляющей системы, либо формироваться в процессе обучения робота человеком.
Описанная схема управления с обратной связью напоминает в общих чертах знаменитую схему формирования условных рефлексов у биологических систем, открытую И. П. Павловым. Часть сенсорных сигналов о внешней среде, поступающих на вход "мозга" робота, можно считать "безусловными раздражителями" (например, сигнал о наличии целевого объекта, с которым робот должен манипулировать), другую часть - "условными раздражителями" (например, определенные звуковые или цветовые сигналы). В результате обучения робота конкретному сочетанию безусловных и условных раздражителей ставится в соответствие некоторое "действие". Таким образом формируются или могут формироваться связи "класс ситуаций - действие". Эти связи играют роль знаний робота о внешнем мире и о своих собственных возможностях взаимодействия с ним. Заметим, что очувствленный робот "рождается" не со знаниями, а со способностью учиться с помощью своих органов чувств. Именно благодаря этой способности он может приспосабливаться (правда, в довольно ограниченных пределах) к изменяющимся условиям функционирования.
Проиллюстрируем это соображение примерами. Первый пример - это "черепаха" английского физиолога Г. Уолтера. Она представляет собой простейший очувствленный робот с трехколесным шасси, обладающий не только "зрением" (светочувствительные элементы) и "осязанием" (датчики соприкосновения), но и "слухом" (микрофон). Благодаря наличию элементов памяти (электрические конденсаторы, способные в течение некоторого времени сохранять накопленный заряд) "черепаха" может обучаться. Г. Уолтер обучил ее останавливаться перед препятствием ("безусловный раздражитель") и сворачивать в сторону ("действие") по звуковому сигналу - свистку ("условный раздражитель"). Для этого он подавал свисток всякий раз, когда "черепаха" при перемещении по комнате натыкалась на какую-либо преграду. По сигналу свистка она останавливалась, отступала назад и сворачивала в сторону, даже если перед ней никакого препятствия не было. Таким образом, Г. Уолтер выработал у своей очувствленной "черепахи" связь "класс ситуаций (свисток) - действие" (объезд препятствия), которая представляет собой по существу "условный рефлекс".
Следующий пример относится к очувствленному роботу, имеющему манипулятор. Допустим, что робот должен манипулировать с произвольно расположенными (разумеется, в поле зрения робота) неориентированными объектами. С помощью искусственных органов чувств (например, органа "зрения") робот может определить местоположение и ориентацию интересующего его объекта в какой-нибудь выбранной системе координат. Анализ этой конкретной ситуации позволит предварительно обученному роботу выработать адекватное "действие". Это "действие" может заключаться, например, в следующем: перевести схват манипулятора в заданную точку (определяемую измеренным местоположением объекта), развернуть его (угол поворота определяется измеренной ориентацией объекта и возможностью его захвата), взять и перенести объект в заданное место. Если в процессе осуществления "действия" искусственные органы чувств сообщат о близости препятствия, то управляющая система произведет коррекцию программного движения с учетом этой информации.
И, наконец, последний пример - очувствленный шестиногий шагающий. робот, схема которого изображена на рис. 5 [10]. Информацию о рельефе местности он получает с помощью дальномера. При постоянном направлении луча дальномера обзор местности производится за счет перемещения робота. При этом, если в процессе измерений возникают скачки дальности, то соответствующие невидимые участки местности классифицируются как "ямы", в противном случае они классифицируются в зависимости от крутизны наклона местности как "подъем", "ровно", "спуск" и т. п. Все это - классы сенсорных ситуаций. Им соответствуют определенные действия. Например, "наступать можно" или "наступать нельзя". Таким образом, формируются связи "класс ситуаций - действие". В процессе движения такого робота на верхнем уровне управляющей системы производится анализ ситуаций и выбор плана постановки ног, а также соответствующих ему действий. Затем на среднем уровне строятся программные движения ног. На нижнем уровне производится синтез закона управления исполнительными приводами и реализация программных движений робота. В результате очувствленный робот перешагивает "ямы" и обходит препятствия. Более подробно о шестиногом. роботе мы расскажем в следующей главе, где мы вновь вернемся к рис. 5.
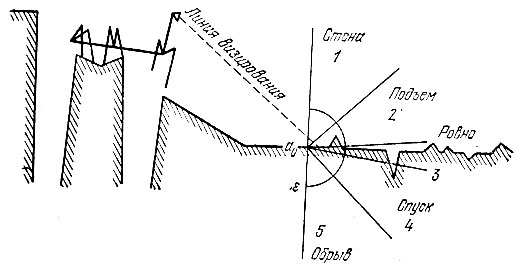
Рис. 5. Схема шагающего робота в условиях со сложным рельефом
Рассмотренные примеры показывают, что именно наличие связей "класс ситуаций - действие" позволяет очувствленному роботу приспосабливать свое поведение к реально складывающейся или даже меняющейся обстановке.
Может создаться впечатление, что с помощью совокупности связей "класс ситуаций - действие" возможно организовать любое сколь угодно сложное целенаправленное поведение робота. Некоторые "оптимисты", подражая Архимеду, могут сказать: "Дайте нам возможность вложить в память управляющей системы достаточно большое количество связей "класс ситуаций - действие", и мы построим робота, способного решать любые, в том числе и интеллектуальные задачи". Покажем, однако, что такая "оптимистическая" концепция несостоятельна.
Начнем с того, что очувствленный робот, в память которого заложено произвольное число связей "класс ситуаций - действие", может совершать лишь те действия, для которых с самого начала имелись "условные или безусловные раздражители". В то же время животные обучаются множеству действий, для которых не существует соответствующего заранее заложенного класса раздражителей ("класса ситуаций"). Никакое сочетание звуков, запахов или световых эффектов не заставит необученную собаку ходить на двух лапах, сохраняя равновесие. В ходе дрессировки (обучения) происходит не замена одного раздражителя другим, а выработка совершенно новой, ранее не существовавшей реакции. По существу управляющая система, реализующая связи "класс ситуаций - действие", выполняет весьма примитивную функцию - учитывает совпадение во времени некоторых событий. При этом формирование сложных действий в ответ на сложные сенсорные ситуации (например, формирование действия, адекватного комплексному сенсорному раздражителю) представляет собой сложную самостоятельную проблему.
Другое принципиальное ограничение возможностей очувствленных роботов связано с тем, что они не способны решать интеллектуальные задачи. В самом деле, поскольку для подобного рода задач невозможно заранее указать алгоритм их решения, то, следовательно, невозможно и формирование реализующих этот алгоритм связей "класс ситуаций - действие".
В настоящее время наибольшее распространение получили биотехнические очувствленные роботы, в которых человек-оператор берет на себя наиболее трудные функции по анализу ситуаций и планированию операций на основе сигналов обратной связи от своих органов чувств. К этому классу относятся роботы с так называемым супервизорным режимом управления. В этом режиме человек-оператор, получая информацию об окружающей робота среде, скажем, по телевизионным каналам, осуществляет целеуказание с помощью тех или иных технических средств. После этого автоматически срабатывает некоторая связь "класс ситуаций - действие", обеспечивающая целенаправленное поведение очувствленного робота. Характерной особенностью супервизорного режима является то, что он создает "эффект присутствия" человека в среде обитания робота (например, на другой планете или на дне океана).
Меньшее применение получили пока автономные очувствленные роботы. Воспринимая (с помощью искусственных органов чувств) и анализируя текущую ситуацию, они автоматически (лучше сказать, чисто рефлекторно) составляют план операций, рассчитывают программные движения и осуществляют их реализацию с помощью исполнительных приводов робота. Сегодня автономные роботы второго поколения существуют лишь в виде моделей и экспериментальных образцов.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'