4. Космические роботы
В 1822 г. Дж. Байрон писал в своей замечательной поэме "Дон Жуан":
"Уж скоро мы, природы властелины, и на Луну пошлем свои машины...".
Гениальное пророчество Дж. Байрона сбылось уже во второй половине XX века. Мы являемся очевидцами невиданного штурма космического пространства при помощи ракетно-космической техники и роботов.
На данном этапе космических исследований большую роль будут играть (и уже играют!) очувствленные космические роботы. В самом деле, искусственные спутники Земли, орбитальные космические станции, автоматические межпланетные станции и космические корабли, как и обычные земные объекты, нуждаются в управлении, контроле, ремонте и техническом обслуживании. Многие из этих функций вполне могут быть поручены роботам второго поколения. Кроме того, для исследования планет Солнечной системы (их атмосферы, поверхности и т. п.) также необходимы очувствленные роботы.
В чем же специфика условий работы космических роботов? В открытом космосе и на Луне нужно считаться с вакуумом, значительной радиацией, резкими изменениями температуры, ослаблением силы тяжести (невесомость), а также с особенностями лунного ландшафта. Что же касается планет Солнечной системы, то каждая из них обладает своеобразными свойствами атмосферы и поверхности (температура, давление, химический состав, рельеф и т. п.), которые сильно варьируются от планеты к планете.
Все это порождает целую систему специфических требований и ограничений, накладываемых на искусственные органы чувств, исполнительные механизмы и другие подсистемы космических роботов. Например, органы передвижения должны позволять роботу перемещаться по местности со сложным рельефом (горы, камни, ямы, пропасти и т. п.) при любом характере грунта на поверхности планет. Здесь возможны и уже применяются различные варианты технических решений: роботы с колесным, шагающим, колесно-шагающим или гусеничным шасси, прыгающие роботы с реактивными движками и ряд других конструкций.
В космосе, как и под водой, весьма велико участие человека в управлении роботом. Это выражается в том, что сейчас наиболее широко применяются копирующий и супервизорный режимы управления космическими роботами. Конечно, определенные операции в космосе будут совершаться (и даже уже совершаются) очувствленными роботами совершенно самостоятельно в автоматическом режиме.
При распределении функций между человеком и космическим роботом нужно исходить из того, чтобы не рисковать человеческой жизнью. Полет человека в космос или на другие планеты сегодня оправдан лишь тогда, когда для решения важнейших принципиальных вопросов необходим его интеллект. Однако недалеко то время, когда и человек, уже ступивший на поверхность Луны, устремится на другие планеты по тем маршрутам, которые проложат для него роботы.
На протяжении последних лет мы являемся свидетелями штурма космоса семейством очувствленных роботов. Многие приоритетные достижения в этой области принадлежат Советскому Союзу. Каковы основные события, вехи освоения космоса с помощью роботов?
В октябре 1959 г. с помощью советской автоматической станции "Луна-3" впервые удалось сфотографировать обратную сторону Луны и тем самым положить начало прямому изучению лунной поверхности и, в частности, осуществлению ее картографирования. Советский космический аппарат "Зонд-3" успешно завершил фотографирование невидимой с Земли стороны Луны. Фундаментальные сведения о поверхности Луны были получены в результате передачи на Землю панорамных снимков последующими советскими дистанционно-управляемыми роботами "Луна-9" и "Луна-13", а также американскими космическими аппаратами "Рейнджер" и "Сервейер". Круговые панорамы лунной поверхности позволили увидеть рельеф Луны так, как его увидел бы человек, находящийся непосредственно на Луне (разрешение переданных роботами изображений составляло 1 мм). Например, на одном из снимков, переданных космическим роботом "Сервейер-1", виден большой камень размером около 0,5 м, а также много мелких углублений и бугорков вблизи места прилунения.
3 февраля 1966 г. советская автоматическая станция "Луна-9" впервые совершила мягкую посадку на поверхность Луны западнее кратеров Рейнер и Марий в Океане Бурь, а ровно через два месяца у Луны появился первый искусственный спутник - советская космическая станция "Луна-10".
24 сентября 1970 г. возвращаемый аппарат автоматической станции "Луна-16", стартовавший 12 сентября 1970 г., доставил на Землю образцы лунного грунта, взятые из "морского" района Луны (северо-восточная часть моря Изобилия). Аналогичная операция была совершена станцией "Луна-20" в феврале 1972 г. Эти выдающиеся космические и робототехнические эксперименты показали, в частности, насколько сложным и, казалось бы, невыполнимым может быть даваемое космическому роботу задание. В самом деле, для его осуществления потребовалось после приближения к Луне совершить серию маневров и мягкую посадку на ее поверхность, взять с помощью манипулятора образцы лунного грунта, уложить их в контейнер, а затем с помощью космической ракеты осуществить старт с поверхности Луны, полет на Землю и мягкую посадку возвращаемого аппарата в заданном районе Советского Союза.
17 ноября 1970 г. автоматическая станция "Луна-17", совершив мягкую посадку в районе Моря Дождей, впервые доставила на Луну очувствленный космический робот "Луноход-1". Этот робот, изображенный на рис. 6, имеет восьмиколесное шасси, большой ассортимент информационно-измерительных датчиков (включая телевизионную камеру), бортовую управляющую систему и средства связи с человеком-оператором, находящимся на Земле. Телевизионный канал обратной связи позволил создать человеку-оператору "ощущение присутствия" на окружающей робота лунной местности. Эта зрительная информация использовалась человеком для управления передвижением "Лунохода-1" и его манипулятором с целью взятия проб грунта в 500 пунктах трассы длиной 10,5 км; в 25 точках проводился химический анализ проб. Работа робота на Луне продолжалась 10,5 месяцев.
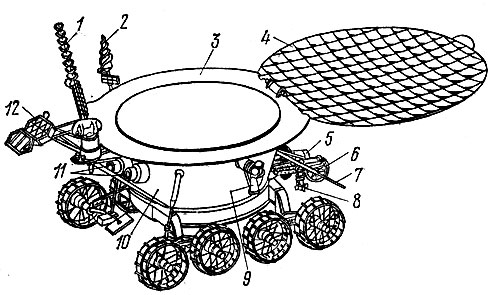
Рис. 6. Космический робот 'Луноход-1': 1 - остронаправленная антенна, 2 - малонаправленная антенна, 3 - радиатор-охладитель, 4 - солнечная батарея, 5 - изотопный источник энергии, 6 - девятое колесо, 7 - штыревая антенна, 8 - прибор для определения физико-механических свойств грунта, 9 - телефотокамера, 10 - герметичный приборный отсек, 11 - телевизионные камеры, 12 - лазерный уголковый отражатель
16 января 1973 г. автоматическая станция "Луна-21" доставила на Луну (кратер Лемонье близ гор Тавр) следующий самоходный космический робот "Луноход-2", отличавшийся от первого незначительной модернизацией. За пять месяцев этот очувствленный робот, управляемый в супервизорном режиме человеком-оператором, прошел около 37 км, передав на Землю много ценной информации.
8 июня 1975 г. в Советском Союзе был осуществлен запуск автоматической станции "Венера-9", а 14 июня - станции "Венера-10". Эти станции, представляющие собой сложные робототехнические системы, предназначались для исследования атмосферы и поверхности Венеры. Через 126 суток полета станция "Венера-9" стала первым искусственным спутником Венеры, а спускаемый аппарат совершил мягкую посадку на поверхность планеты с помощью парашютной системы, которую в нужный момент включила бортовая автоматика. Во время спуска и после посадки со спускаемого аппарата передавалась ценнейшая и уникальная научная информация о физических и химических свойствах Венеры и ее атмосферы. На Землю было также передано полученное с помощью телефотометров панорамное изображение ландшафта Венеры. В тот же день эти сенсационные фотографии увидели миллионы телезрителей, и они обошли мировую печать. Через три дня - 25 октября - "Венера-10" повторила весь сложный цикл операций своей предшественницы в другом районе Венеры.
В настоящее время на каждый пилотируемый космический полет в ведущих космических державах - СССР и США - приходится приблизительно 25-30 автоматических. Этот факт еще раз свидетельствует о том, что основную работу в освоении планет Солнечной системы должны выполнять роботы. И они эту работу уже выполняют, 20 августа 1975 г. в США был запущен на Марс первый космический робот серии "Викинг". Покрыв 815 млн. км межпланетного пути, он в июне 1976 г. вышел на орбиту вокруг Марса. По сигналу с Земли было проведено отделение посадочного блока робота от орбитального. Дальнейшие операции по спуску и мягкой посадке выполнялись автоматически. Войдя в марсианскую атмосферу, "Викинг" открыл (на высоте 6 км) парашют, а затем, выпустив свое шасси, включил тормозной двигатель и "примарсился".
Посадочный, блок "Викинга" - это, по существу, сложный робот-лаборатория, но не подвижный, как "Луноход", а стационарный (рис. 7). Он спроектирован специально для суровых условий марсианской среды: там холодно и сухо, временами бывают пылевые бури. В этих условиях робот должен функционировать по возможности самостоятельно, не требуя команд человека, тем более, что время между посылкой и приемом радиокоманды между Землей и Марсом составляет 20 минут. В связи с этим в память робота были введены специальные программы, которыми он мог руководствоваться в течение трехнедельной работы, даже при отсутствии связи с Землей.
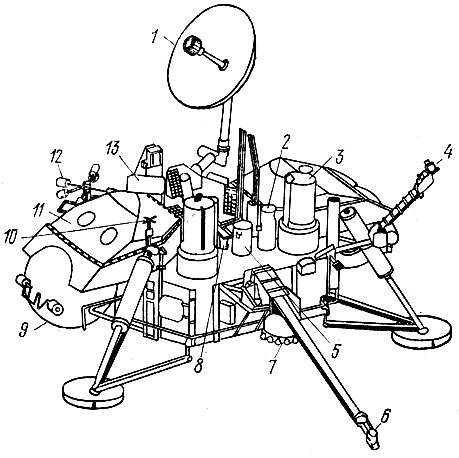
Рис. 7. Космический робот 'Викинг': 1 - антенна для передач на Землю, 2 - приемное устройство для пробы грунта, 3 - телекамера, 4 - блок метеорологических приборов, 5 - приемное устройство для биологических исследований, 6 - грузозаборное устройство, 7 - тормозной двигатель посадки, 8 - рентгеновский спектрометр, 9 - топливный бак, 10 - антенна для приема команд, 11 - изотопный источник энергии, 12 - антенна для передач на орбитальный отсек, 13 - сейсмометр
Для поиска форм жизни на Марсе робот "Викинг" оснащен химико-биологической лабораторией - сложнейшим агрегатом, состоящим из разнообразной химической аппаратуры и автоматических устройств. Вся лаборатория массой 13,6 кг и объемом около 0,03 м3 содержит более 40000 микроминиатюрных компонент, в том числе 22000 транзисторов, химические печи, нагреватели, счетчики Гейгера, баллоны с радиоактивными газами, водой и многое другое. Робот оснащен манипулятором, который позволяет захватить специальным совком образцы марсианского грунта в радиусе трех метров. Эксперименты, проведенные "Викингом", позволили получить много ценной информации о Марсе.
Космические роботы служат не только для изучения среды и обстановки на различных планетах и в космосе. Они могут выполнять разнообразные технические операции. Пример таких операций - саморемонт антенн, солнечных батарей и других устройств робота, перезарядка фото- и киноаппаратуры, сборка и сварка узлов крупных космических станций и т. п. Роботы могут оказаться очень полезными или даже незаменимыми при стыковке и расстыковке космических аппаратов или их отдельных блоков, в осуществлении их заправки топливом, а также в других операциях по обслуживанию космических аппаратов. В научно-исследовательском центре Маршалла (США) изучается возможность создания "космического манипулятора" и "космического такси", предназначенных для проведения в космических условиях контроля, ремонта и технического обслуживания разнообразных космических систем. В будущем космические роботы будут производить установку и монтаж необходимых сооружений с определенной аппаратурой, осуществлять посадку и взлет космических аппаратов, производить манипуляционные и транспортные операции как в космосе, так и на других планетах.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'