3. Примеры интеллектуальных роботов
В настоящее время существует ряд чрезвычайно интересных проектов создания интеллектуальных роботов различного назначения. Рассмотрим кратко цели, задачи и достижения в области осуществления некоторых из этих проектов. Подробнее с этими вопросами можно познакомиться в специальной литературе [5, 7, 10, 12, 17]. Во всех этих проектах разработка алгоритмического, программного и технического обеспечения роботов третьего поколения осуществляется на упрощенных моделях и экспериментальных образцах путем последовательного наращивания элементов интеллекта роботов и их функциональных возможностей.
В 1969 г. в Электротехнической лаборатории (Япония) началась разработка проекта "промышленный интеллектуальный робот". Цель этой разработки - создание очувствленного манипуляционного робота с элементами искусственного интеллекта для выполнения сборочно-монтажных работ с визуальным контролем.
Манипулятор робота имеет шесть степеней свободы и управляется мощной мини-ЭВМ NEAC-3100 (объем оперативной памяти 32000 слов, объем внешней памяти на магнитных дисках 273000 слов на одном диске), формирующей требуемое программное движение, которое отрабатывается следящей электрогидравлической системой. Схват манипулятора оснащен тактильными датчиками.
В качестве системы зрительного восприятия используются две телевизионные камеры, снабженные красно-зелено-синими фильтрами для распознавания цвета предметов. Поле зрения телевизионной камеры разбито на 64×64 = 4096 ячеек, яркость каждой из которых после преобразования в цифровой сигнал направляется в память ЭВМ. В результате обработки полученной информации грубо определяется область, занимаемая интересующим робота предметом: Далее, с целью детального изучения этого предмета выявленная область (обычно квадратное "окошко") вновь делится на 4096 ячеек. В том случае, когда предмет не помещается в выбранное "окошко", оно автоматически перемещается, подобно тому, как человек скользит взглядом по предмету. Первая стадия обработки получаемой видеоинформации состоит в выделении контуров плоской оптической проекции реальных предметов, определении расстояния до них, цвета, текстуры и других признаков. Полученные таким образом первичные признаки используются в дальнейшем для распознавания и описания видимых предметов. Сегодня робот Электротехнической лаборатории способен распознавать только простые предметы, ограниченные плоскостями и цилиндрическими поверхностями, при специальных условиях освещения.
Обработка сенсорной информации и управление программным движением манипулятора осуществляется в режиме диалога с человеком. Робот функционирует в трех режимах. В режиме № 1 человек на языке, близком к естественному, печатает на пишущей машинке команды и необходимые данные, которые автоматически интерпретируются и вводятся в память ЭВМ. В режиме № 2 программа-редактор транслирует программу, написанную на входном языке, на внутренний язык ЭВМ и при необходимости корректирует ее, изменяя команды и элементы данных. В режиме № 3 управляющие подпрограммы считываются и автоматически отрабатываются исполнительными механизмами робота. Стоимость экспериментального образца описанного робота составляет примерно 400 тыс. долларов. По прогнозам японских специалистов, интеллектуальные роботы-сборщики еще нуждаются в совершенствовании и могут появиться на рынке не раньше 1980 г.
Центральная исследовательская лаборатория фирмы "Хитачи" (Япония) разработала экспериментальный образец робота с элементами искусственного интеллекта, способного производить сборку изделий по чертежу. В состав Хитачи-робота входят управляющая ЭВМ HITAC-7250 (объем оперативной памяти 33000 слов), две телевизионные камеры, исполнительные серводвигатели и манипулятор с шестью степенями свободы, оснащенный очувствленным схватом.
Робот функционирует следующим образом. Одна телевизионная камера считывает и вводит в ЭВМ чертежи, на которых в трех проекциях представлены детали и подлежащие сборке изделия. Другая телевизионная камера направлена на предметы, расположенные на сборочном столе, и вводит в ЭВМ плоскую оптическую проекцию видимой области. Полученная информация подвергается первичной обработке и фильтрации с целью выделения контуров видимых предметов. Далее с помощью программ, реализующих элементы интеллекта робота, осуществляется распознавание предметов, необходимых для сборки изделия, изображенного на чертеже, планирование процесса сборки и расчет требуемой последовательности программных движений манипулятора. После этого серводвигатели обеспечивают отработку построенных таким образом программных движений. Тем самым осуществляется сборка изделия по чертежу из произвольно расположенных деталей. Следует заметить, однако, что пока Хитачи-робот успешно функционирует лишь при строгом соблюдении ряда весьма жестких ограничений на число и форму деталей, сложность чертежей и изделий, условия освещения предметов и т. п. В этих условиях для модельной задачи сборки из "кубиков" на считывание чертежа затрачивается 20 сек, на восприятие и первичную обработку изображения сборочного стола - 240 сек, на распознавание каждой детали (типа параллелепипеда) - 50 сек, на планирование сборочных операций - 10 сек и на построение и отработку программных движений - 200 сек.
В США работы по созданию интеллектуальных роботов сосредоточены в университетах и институтах, главным образом в Стенфордском исследовательском институте, в Стенфордском университете и в Массачусетском технологическом институте. В последнее время вопросы создания роботов третьего поколения привлекли также внимание ряда крупных роботостроительных фирм, таких, например, как "Юнимейшн" и "AMF" (США).
В Стенфордском исследовательском институте создана модель транспортного робота с трехколесным шасси, оснащенного телевизионной камерой, оптическим дальномером, тактильными датчиками, антенной и бортовым логическим устройством. Сигналы прямой и обратной связи робота с управляющей ЭВМ SDS-940 передаются по двум радиоканалам, один из которых передает телеметрическую информацию, а второй - телевизионную (зрительную) информацию от робота к ЭВМ. Вместо манипулятора на этом роботе установлен специальный толкатель для воздействия на предметы окружающей среды. Положение и ориентация робота определяются по данным отсчета поворотов исполнительных валов независимых электродвигателей двух ведущих колес. Управление положением и фокусировкой телекамеры и положением дальномера осуществляется ЭВМ с помощью шаговых двигателей.
Основное внимание в рамках этого проекта уделяется созданию программ, позволяющих роботу формировать в памяти управляющей ЭВМ модель среды, планировать поведение, выбирать маршрут среди препятствий и осуществлять движение по нему. Решение перечисленных проблем необходимо для создания автономного подвижного робота с элементами искусственного интеллекта.
В Стенфорде также создан робот типа "глаз-рука", который выполняет сборку "домиков" из "кубиков", сборку простого электродвигателя и т. п. В качестве управляющей ЭВМ используется машина PDP-6 (объем оперативной памяти 131 тысяча 36-битных слов, объем внешней памяти на дисках - 11 млн. слов), работающая в режиме разделения времени. В состав системы входит телевизионная камера, манипулятор с шестью степенями свободы, схват, исполнительные приводы, аппаратура для ввода речевых команд, а также местные и дистанционные терминалы (телетайпы), дисплеи, печатающие устройства и графопостроители.
В лаборатории искусственного мышления Массачусетского технологического института в рамках проекта "глаз-рука" создана действующая модель интеллектуального робота, состоящего из телевизионной камеры, манипулятора с шестью степенями свободы, очувствленного схвата с двумя и пятью "пальцами" и управляющей ЭВМ. Робот способен (после предварительного обучения на примерах) распознавать предметы простой формы и сооружать из них простейшие конструкции.
В последние годы все большее внимание ученых стала привлекать проблема создания автоматических шагающих аппаратов. Такие аппараты, движущиеся с помощью "ног" (педипуляторов), обладают в принципе возможностью высокой степени адаптации к рельефу местности и способны при движении в сложных условиях обеспечить большую комфортабельность и лучшую проходимость, чем колесный или гусеничный аппарат. Указанные достоинства шагающих аппаратов были ясны достаточно давно. Модели первых шагающих аппаратов были сконструированы великим русским математиком П. Л. Чебышевым, который назвал их "стопоходящими машинами".
Одной из причин, тормозивших развитие этого направления, являлись трудности в создании системы управления, способной обеспечить устойчивость аппарата и координацию его "ног" при движении по неровной поверхности. Значительный прогресс в области миниатюризации элементов ЭВМ позволяет рассчитывать на то, что с помощью бортовых ЭВМ окажется возможным реализовать достаточно сложные и совершенные алгоритмы управления шагающим аппаратом. Разработка таких алгоритмов становится насущной проблемой. Следует заметить, что в последние годы в СССР, США, Японии и других странах ведутся не только научно-исследовательские, но и опытно-конструкторские работы по созданию интеллектуальных шагающих роботов. Такие роботы могут найти применение прежде всего в космических и подводных исследованиях, в сельском хозяйстве, а также в области создания протезов и лечебных аппаратов, необходимость в которых, как это ни печально, остается весьма насущной.
В Институте прикладной математики АН СССР в течение ряда лет под руководством Д. Е. Охоцимского ведутся работы по созданию очувствленного шагающего робота с элементами искусственного интеллекта [10]. Целью исследований является синтез и отработка методами моделирования алгоритмов управления шестиногим мобильным роботом на сложной, заранее неизвестной местности.
Рассматривается модель шестиногого шагающего робота, оснащенного системой сбора информации о местности и бортовой управляющей ЭВМ. Предполагается, что измерительная система (дальномер) способна определять расстояние до "видимых" точек рельефа местности. Первичные измерения проходят несколько стадий обработки и фильтрации для выделения препятствий, определения проходимости местности и принятия решения о целесообразном характере движения с учетом свойств препятствий. Схематическое изображение шестиногого робота с дальномерной измерительной системой представлено на рис. 5. Для этого робота характерны 6 степеней свободы корпуса и 18 степеней свободы ног. Богатая кинематика шестиногого робота открывает широкие возможности для адаптации (приспособления) к местности.
В состав системы управления робота входят информационная система, система построения движения, навигационная система и система исполнения движения. Информационная система получает, перерабатывает информацию о местности и передает ее в систему построения движения, которая на основе полученной информации решает следующие задачи:
- построение программы движения ног;
- координация ног;
- выбор мест постановки ног на местности;
- построение программы движения корпуса;
- выбор трассы перемещения по местности.
Система исполнения движения робота реализует построенную таким образом программу движения с учетом информации от навигационной системы, определяющей текущее положение и ориентацию робота, и тактильных датчиков, расположенных на ногах.
Процесс получения информации о местности заключается в управлении лучом дальномера и определении текущей величины дальности. При постоянном направлении измерительного луча (которое выбиралось с таким расчетом, чтобы обеспечить просмотр поверхности вдоль трассы вперед по движению робота на расстояние порядка 1,5 длины корпуса) обзор местности происходит за счет перемещения робота. Если в процессе измерений возникают скачки дальности, то невидимые части местности либо классифицируются как преодолимая щель или яма (скачок дальности достаточно мал), либо включается режим ожидания для дополнительного осмотра после подхода робота к препятствию. Кроме того, специальный фильтр в зависимости от крутизны наклона местности классифицирует препятствия на следующие классы:
- крутой подъем - наступать нельзя;
- подъем - наступать можно;
- ровно - наступать можно;
- спуск - наступать можно;
- крутой спуск - наступать нельзя.
Эта информация используется в дальнейшем для формирования грубой модели местности, опознавания типов препятствий и определения коридора допустимых положений корпуса, обеспечивающего "дотягивание" ног до выбранных мест их постановки и статическую устойчивость робота. На этом этапе используется принцип программируемой фильтрации, согласно которому результаты текущих измерений сравниваются в специальном фильтре с ожидаемыми значениями, прогнозируемыми на основе опознавания типа опорной поверхности. При совпадении (в пределах принятой точности) текущей и прогнозируемой информации программа фильтрации для построения грубой модели местности вообще не включается. Это позволяет примерно на порядок увеличить скорость получения информации о местности, необходимой для работы системы построения движения.
Характерной особенностью шагающего робота, определяющей характер его движения, является походка. Для шестиногого робота существует большое число различных походок. Походка может быть устойчивой или неустойчивой. Для статической устойчивости походки (т. е. устойчивости неподвижно стоящего робота) необходимо, чтобы в каждый момент движения по крайней мере три ноги находились в контакте с опорной поверхностью*.
* (Походку можно рассматривать как средство адаптации к местности. Для расширения класса адаптивности робота можно осуществлять переключение походок. Весьма интересным является вопрос об оптимальном (в смысле подходящего критерия качества) выборе походки для различных типов местности.)
Система построения движения строит требуемую программную кинематику, отвечающую выбранной походке. Далее исполнительная система, работающая в тесном взаимодействии с навигационной системой построения движения, синтезирует закон управления моментами (действующими в суставах ног), который стабилизирует эту предварительно рассчитанную программную кинематику робота.
Специальная координирующая программа-монитор обеспечивает взаимодействие описанных выше систем в процессе выработки целенаправленных движений, а именно: осмотр определенных участков местности по запросам системы построения движения и изменение режима движения по сигналам информационной и навигационной системы (при нехватке информации для системы построения движения, а также при большой загрузке управляющей ЭВМ).
Рассмотренная многоуровневая система адаптивных алгоритмов и программ управления очувствленным шестиногим роботом представляет его интеллект. Именно благодаря этому искусственному интеллекту шагающий робот принципиально может самостоятельно выполнять разнообразные двигательные задачи на сложной, заранее неизвестной местности. Отработка элементов интеллекта шестиногого робота осуществлялась путем моделирования на ЭВМ БЭСМ-6 рельефа местности и самого робота, включая системы: построения движений, измерительную, навигационную, исполнительную. Результаты моделирования отображались на экране дисплея в виде движущегося изображения шестиногого робота. Моделирование на ЭВМ и анализ полученного на экране дисплея изображения процесса преодоления препятствий, позволили разработчикам робота не только убедиться в работоспособности алгоритмов, но и составить суждение о путях их совершенствования. Сегодня эти алгоритмы успешно управляют макетами шагающих роботов.
Манипуляционные роботы как средство автоматизации ручного труда являются сейчас наиболее распространенной и актуальной разновидностью роботов. Значительные результаты в области разработки систем управления интеллектуальных манипуляционных роботов получены коллективом сотрудников Московского высшего технического училища им. Н. Э. Баумана под руководством Е. П. Попова [12]. Большое внимание в этих исследованиях уделяется созданию человеко-машинных комбинированных систем управления, оптимальному сочетанию элементов естественного и искусственного интеллекта в процессе выполнения роботом достаточно сложных заданий. Такие комбинированные системы оказываются наиболее эффективными в широком классе задач по двум причинам.
Существует много задач, когда заранее построенная жесткая программа управления роботом неприемлема (например, вследствие изменения условий функционирования робота) и в то же время технические возможности не позволяют необходимым образом очувствить этот робот и придать ему элементы искусственного интеллекта. Тогда принципиально невозможно создание автономного робота, и приходится прибегать к помощи человека. С другой стороны, в биотехническом режиме управление манипуляционным роботом все время осуществляет человек-оператор. Основными недостатками такого режима являются медленный темп работы и быстрая утомляемость человека-оператора. В автономном режиме робот может функционировать значительно более производительно и надежно в течение длительного времени.
Поэтому в подобных ситуациях наиболее рациональным оказывается комбинирование автономного и биотехнического режимов функционирования манипуляционных роботов. Это значит, что в результате распределения функций та часть операций, которая поддается автоматизации, выполняется роботом в автономном режиме, а остальная - поручается человеку-оператору.
Важным классом систем с комбинированным управлением являются системы супервизорного управления, когда человек-оператор вмешивается в процесс автономного функционирования манипуляционного робота не путем переключения процесса управления на себя, а посредством эпизодических указаний, связанных, например, с распознаванием, целеуказанием, переключением программ управления и т. п. Эти системы особенно перспективны в роботах, функционирующих в так называемых экстремальных (т. е. вредных или невозможных для жизнедеятельности человека) условиях.
Каковы же особенности интеллектуальных роботов с супервизорным управлением? Характерная особенность таких роботов заключается в том, что в процессе их функционирования используется, когда это необходимо, интеллект человека-оператора. Кроме обычных обратных связей, которыми охвачен нижний уровень управления программным движением, здесь особую роль играет зрительная обратная связь, а также обратная связь по усилиям и моментам, возникающим в манипуляторе. Зрительная обратная связь организуется с помощью оптических средств черно-белого, цветного или даже объемного телевидения. Обратная связь по усилиям и моментам позволяет человеку-оператору ощущать через задающий орган нагрузку на исполнительном манипуляторе. Такое "отражение усилий" - важнейший фактор повышения эффективности всех действий человека-оператора. В самом деле, при наличии зрительной обратной связи и "отражения усилий" характер действий человека-оператора приближается к тому, как если бы он работал непосредственно с теми предметами, с которыми работает исполнительный манипулятор.
Зрительная обратная связь позволяет человеку-оператору осуществлять управление манипулятором с помощью рукоятки. Разрабатываются две схемы управления: управление по скорости и управление по силе.
В первом случае человек-оператор, воздействуя на управляющую рукоятку, задает желаемый (программный) вектор скорости движения схвата исполнительного манипулятора*. При этом направлением воздействия на рукоятку определяется программное направление вектора скорости, а силой воздействия (приводящей к сжатию подпружиненной рукоятки) - ее программная величина. Значения этих параметров передаются управляющей ЭВМ, которая по специальной подпрограмме рассчитывает соответствующее программное движение всех звеньев манипулятора.
* (Управляющая рукоятка имеет удобную форму. Она предоставляет возможность малых подпружиненных смещений либо сразу по всем шести степеням свободы, присущим схвату как твердому телу, либо по некоторым из них.)
Другая схема организации управления движением схвата с помощью рукоятки - управление по силе - заключается в следующем. Воздействуя в определенном направлении и с определенным усилием на управляющую рукоятку, человек-оператор задает желаемое (программное) движение схвата не непосредственно, как в первом случае, а косвенно, через силовые факторы. Значения параметров программной силы (направление и величина) передаются в управляющую ЭВМ, где они пересчитываются в программное движение манипулятора, обладающее тем свойством, что оно бы обязательно реализовалось, если бы мы потянули схват манипулятора с той силой, которую задал человек-оператор с помощью рукоятки.
Необходимо подчеркнуть, что при любой схеме супервизорного управления первостепенное значение имеет проблема рационального распределения функций между интеллектом человека и механикой и автоматикой робота в процессе решения задач. При этом человек-оператор (со всеми присущими ему психофизиологическими характеристиками) должен рассматриваться как звено системы управления интеллектуального робота.
В Ленинградском политехническом институте под руководством Е. И. Юревича в течение ряда лет ведутся работы по созданию и совершенствованию опытных образцов очувствленных роботов (на базе манипулятора УМ-1) и интеллектуального робота (на базе "антропоморфного" манипулятора с шестью степенями свободы [18]). Основными задачами в этих исследованиях являются разработка достаточно мощной алгоритмической системы управления, а также оснащение робота искусственными органами чувств (тактильные и зрительные датчики) и средствами речевого общения с человеком-оператором.
На ранней стадии исследований была создана система программ для ЭВМ, управляющей движениями манипулятора с шаговыми приводами, изображенного на рис. 8. При этом каждой операции, которую мог совершить робот, соответствовала отдельная подпрограмма типа "класс ситуаций - действие". Расширение функциональных возможностей такого робота достигалось путем разработки и введения новых подпрограмм. Основным недостатком этой системы было то, что многие подпрограммы содержали большое количество одинаковых частей, что требовало дополнительной памяти и ограничивало возможности эффективного наращивания двигательных и интеллектуальных возможностей робота.
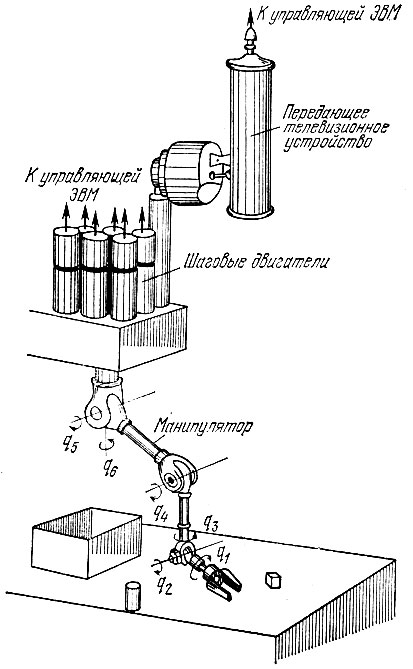
Рис. 8. Общий вид манипуляционного робота с шаговыми приводами
Поэтому дальнейшие исследования были направлены на создание алгоритмической управляющей системы робота по принципу операционных систем ЭВМ, работающих в мультипрограммном режиме (т. е. в режиме, когда центральный процессор управляющей ЭВМ используется для решения многих задач). При таком подходе алгоритмическая управляющая система представляет собой набор программных модулей - специализированных подпрограмм, организацию взаимодействия которых осуществляет программа-координатор.
Человек дает роботу задание на специально разработанном языке директив. Для этого он с пульта управления задает директивы, которые инициируют в оперативной памяти модули, необходимые для выполнения задания. Следует отметить, что человек может с пульта управления отменять директивы, осуществлять аварийную остановку манипулятора, задавать параметры программной траектории схвата, вводить координаты препятствия и т. п. Если выполнение задания по какой-либо причине оказалось невозможным или требует дополнительных данных, то управляющая система информирует об этом человека посредством пишущей машинки или световой индикации на пульте управления. Таким образом, реализуется диалоговый режим управления.
Модульный принцип построения алгоритмической управляющей системы робота позволяет расширять его возможности путем добавления новых и изменения уже имеющихся программных модулей. Описанная система прошла два этапа своего развития и сейчас находится на третьем этапе. Сначала управление движением робота осуществлялось по существу человеком-оператором (копирующий режим управления "антропоморфным" манипулятором). На этом этапе управляющая система не содержала целого ряда модулей, необходимых для автономного функционирования. На втором этапе были разработаны модуль опроса датчиков, модуль вычисления по заданному положению схвата соответствующей конфигурации манипулятора, модуль построения требуемого движения и т. п. Это позволило, используя полуавтоматическую систему целеуказания, выполнять некоторые задачи в автономном режиме.
Третий этап развития алгоритмической управляющей системы робота предусматривает расширение ее интеллектуальных возможностей, а также обеспечение согласованной работы двух взаимодействующих манипуляторов и речевое общение с роботом. Для этой цели был создан экспериментальный образец интеллектуального (интегрального) робота ЛПИ-2. Образец представляет собой универсальную физическую модель робота, имеющего два манипулятора и набор съемных схватов. Схваты очувствлены тактильными датчиками и датчиками ближней локации. В комплекс средств общения человека-оператора с роботом, наряду со стандартным оборудованием управляющей ЭВМ (телетайпы и т. п.), входят телевизионная система целеуказания, пульт управления с задающим манипулятором, очувствленный стол, позволяющий автоматически определять координаты находящихся на нем предметов, устройство для речевого ввода заданий (команд, директив). Управляющая система робота построена на базе Вычислительного комплекса, включающего ЭВМ "АСВТ-6000" и "Минск-32".
В настоящее время управление роботом ЛПИ-2 осуществляется человеком-оператором с помощью специального пульта. Этот пульт имеет клавиатуру для ввода информации, индикационное табло, систему целеуказания по телевизионному изображению реальной сцены и вспомогательную коммутационную аппаратуру. Работа человека начинается с набора на клавиатуре определенной директивы, соответствующей той задаче, которую робот должен выполнить. Затем в режиме диалога вводится вся необходимая для выполнения этой директивы дополнительная информация. После этого директива отрабатывается автоматически. Человек при этом только контролирует ее выполнение и приходит на помощь роботу в особо сложных или непредвиденных ситуациях.
Полное осуществление третьего этапа совершенствования системы управления роботом ЛПИ-2 требует разработки эффективных алгоритмов распознавания зрительных, тактильных и звуковых образов, формирования понятий и моделирования внешней среды, планирования поведения, построения программных движений при наличии препятствий и адаптивного управления движением. Некоторые из перечисленных элементов интеллекта разработаны и продолжают совершенствоваться совместными усилиями ученых и инженеров Ленинградского политехнического института и Ленинградского университета. В частности, в 1975 г. была разработана адаптивная система управления программным движением манипуляционного робота с шаговыми приводами, подробное описание которой будет дано ниже.
В Ленинградском университете под руководством В. А. Якубовича ведутся теоретические и экспериментальные работы в области создания элементов интеллекта манипуляционных роботов и транспортных роботов с колесным или гусеничным шасси [5, 11, 15].
Основное внимание в этих исследованиях направлено на разработку адаптивных алгоритмов распознавания сложных изображений трехмерных сцен, планирования поведения роботов, прокладки безопасного маршрута среди препятствий, построения программных движений исполнительных механизмов и управления исполнительными приводами автономно функционирующих роботов. Целью исследований является создание эффективной системы алгоритмического и программного обеспечения интеллектуальных роботов.
Рассмотрим более подробно отличительные черты этой работы, в которой принимает участие и автор, а также основные достижения на пути создания элементов интеллекта роботов. Прежде всего заметим, что робот должен автономно функционировать в заранее неизвестной и меняющейся непредвиденным образом обстановке. Неизвестными могут быть такие факторы, как характеристики объектов внешней среды (неизвестные препятствия), параметры (масса, форма, размеры) объектов манипулирования и нагрузки на шасси самоходной тележки робота, характеристики взаимодействия с грунтом опорной поверхности, параметры электроусилительной аппаратуры и исполнительных приводов и т. п. В то же время закон управления, обеспечивающий решение роботом поставленной человеком задачи, зависит от перечисленных неизвестных факторов. Как уже отмечалось, определение значений этих факторов (параметров) на практике либо сложно (требует дополнительной аппаратуры, вмешательства человека-оператора и т. п.), либо вообще невозможно. Поэтому целесообразно с самого начала строить адаптивную систему управления роботом, которая обеспечивает автоматическое приспособление робота к фактическим, но, возможно, неизвестным условиям функционирования.
Именно такая адаптивная система была создана в Ленинградском университете для управления исследовательским роботом-манипулятором с шаговыми приводами, изображенным на рис. 8. Манипулятор этого робота оснащен датчиками положения и усилий, а его схват - тактильными датчиками и фотодатчиками ближней локации. Передающее телевизионное устройство служит для ввода изображения рабочей зоны в управляющую ЭВМ, а также для отображения этой информации на телеэкран. Человек-оператор может осуществлять целеуказание путем прикосновения "световой указкой" к соответствующим точкам экрана.
Эксперименты с роботом показали, что точность позиционирования манипулятора зависит от параметров (массы, размеров, формы) объекта манипулирования и существенно снижается при больших нагрузках на выходных валах исполнительных шаговых двигателей. Это связано с известным эффектом "потери шагов" двигателей при моментах нагрузки, превышающих по абсолютной величине так называемые моменты приемистости двигателей. Кроме того, значения многих параметров и характеристик манипулятора, исполнительных приводов и объекта манипулирования не только неизвестны (или известны приближенно), но и могут меняться непредсказуемым образом в процессе функционирования робота.
Ясно, что идеальный закон управления, обеспечивающий желаемое программное движение манипулятора, зависит от перечисленных факторов. Однако непосредственно воспользоваться этим законом управления нельзя, и возникает необходимость в адаптации, т. е. в подстройке параметров закона управления в процессе функционирования. Для подстройки этих параметров (трактуемых как оценки неизвестных параметров идеального закона управления) использовались конечно-сходящиеся алгоритмы адаптации (см. подробнее [5, 11, 15], а также следующую главу), гарантирующие достижение манипулятором цели спустя время адаптации. Результаты экспериментов с описанной адаптивной системой управления манипуляционным роботом свидетельствуют о ее работоспособности и эффективности в условиях большой неопределенности, когда обычная, неадаптивная система принципиально не может обеспечить высокое качество управления.
В Ленинградском университете разрабатывается также алгоритмическое и программное обеспечение адаптивных систем управления транспортных роботов с колесным и гусеничным шасси. Эти роботы предназначены для перемещения на заранее неизвестной местности с целью сбора информации и транспортировки грузов. Они должны обходить или преодолевать препятствия на местности, обеспечивая при этом выполнение формулируемых человеком заданий.
Поскольку ряд характеристик среды и условий функционирования транспортного робота заранее неизвестен, необходимо, чтобы его система управления была адаптивной. Адаптивное управление движением такого робота целесообразно строить как многоуровневую иерархическую систему взаимодействующих алгоритмов обработки сенсорной информации и управления исполнительными механизмами. Исходя из специфики решаемого роботом класса задач, были выделены следующие уровни иерархии:
- планирование поведения и принятие решений;
- распознавание, анализ ситуаций и формирование модели среды;
- прокладка безопасного маршрута на местности с препятствиями;
- построение программного движения исполнительных механизмов;
- адаптивное управление программным движением.
Алгоритмы, лежащие в основе работы каждого уровня иерархии, а также вопросы их взаимодействия, подробно рассматриваются в следующей главе. Поэтому здесь мы ограничимся лишь описанием действующих моделей очувствленных транспортных роботов, управляемых с помощью ЭВМ, и экспериментов по адаптивному управлению ими.
Первая модель транспортного робота сопряжена с ЭВМ "ОДРА-1204". Она представляет собой самоходную тележку с гусеничным шасси, на которой соосно установлены ультразвуковой дальномер и узконаправленный фотодатчик, имеющие возможность вращаться в горизонтальной плоскости в секторе ±175°. Управляющая система модели обеспечивает шесть режимов движения ("вперед", "вперед влево", "вперед вправо", "назад", "назад влево", "назад вправо") и два режима движения дальномера и фотодатчика ("поворот влево" и "поворот вправо"). Управление движением модели транспортного робота и опросом, информационно-измерительных датчиков осуществляется путем формирования последовательностей управляющих сигналов необходимой длительности. По команде выдачи информации информационно-измерительная система определяет угол поворота датчиков относительно продольной оси робота (в градусах), расстояние до препятствия (в см), отразившего ультразвуковой импульс, и двоичный сигнал от фотодатчика, регистрирующий наличие или отсутствие в "поле зрения" светового маяка. Разрешающая способность сканирующего устройства, на котором установлены ультразвуковой дальномер и фото датчик, равна Г. Ультразвуковой дальномер позволяет определять расстояние до препятствий в радиусе 140 см с точностью 1 см. Для определения ориентации системы используется прецизионный потенциометр, сигналы от которого через аналого-цифровой преобразователь и устройство ввода попадают в ЭВМ. Для определения расстояния специальный датчик времени (таймер) измеряет время между моментами посылки и приема ультразвуковых импульсов. Измерение временного интервала осуществляется программным путем.
Вторая модель транспортного робота с гусеничным шасси, сопряженная с ЭЦВМ "БЭСМ-3М", существенно отличается от первой конструкцией информационно-измерительной системы. Эксперименты па адаптивному управлению этой моделью проводились на специально сконструированном полигоне, позволяющем определять текущее положение и ориентацию робота, а также координаты препятствий.
В состав программного обеспечения первой модели, связанной с ЭЦВМ "ОДРА-1204", входят: 1) координирующая программа (монитор), обеспечивающая взаимодействие остальных программ в соответствии с полученным от человека-оператора заданием; 2) программа обработки сенсорной информации, поступающей от ультразвукового дальномера, и программа управления им; 3) программа прокладки безопасного маршрута на основе имеющейся априорной и текущей сенсорной информации о препятствиях (с учетом размеров робота); 4) программа адаптивного управления движением робота в целевую точку.
Программа обработки сенсорной информации выполнена в двух вариантах: 1) запоминание всех обнаруженных дальномером точек; 2) восстановление контуров препятствий по информации дальномера и "склеивание" планов местности, полученных из разных точек обзора. Программа прокладки маршрута также выполнена в двух вариантах: 1) прокладка локально-оптимального маршрута методом направленного перебора на "квантованной" местности; 2) построение оптимального маршрута с помощью алгоритма анализа специального графа препятствий и алгоритма направленного перебора.
Опишем кратко взаимодействие перечисленных программ при решении задачи движения в целевую точку в условиях заранее не заданных препятствий. Координирующая программа высшего уровня инициирует программу обработки сенсорной информации, после чего управление и информация об обнаруженных препятствиях передаются в программу прокладки маршрута, которая строит безопасный маршрут. Первая целевая точка построенного маршрута поступает в программу адаптивного управления движением, которая вырабатывает закон управления и выдает команду на осуществление движения. После завершения каждого режима движения информационно-измерительная система определяет координаты и ориентацию модели робота и передает их программе адаптивного управления для коррекции закона управления. После завершения движения в очередную целевую точку обрабатывается сенсорная информация о препятствиях и управление передается программе прокладки маршрута, которая проверяет пригодность построенного заранее маршрута, основываясь на новой информации о препятствиях и действительном местоположении модели. В случае, если старый маршрут оказывается непригодным для продолжения движения, вырабатывается новый безопасный маршрут. После этого управление передается программе адаптивного управления, и цикл повторяется вплоть до достижения цели.
На модели транспортного робота, управляемой с помощью ЭВМ "ОДРА-1204", проводились эксперименты по отработке адаптивной системы управления в задаче движения в целевую точку при наличии неизвестных препятствий и, кроме того, отдельно проверялась программа адаптивного управления движением. Для проверки работы этой программы изменялись некоторые характеристики робота и среды, и анализировалась способность программы адаптироваться к этим изменениям. Изменению подвергались питающее напряжение электропривода (в пределах 20% от номинального), нагрузка на шасси (робот нагружали объектами различной формы и веса, который изменялся в пределах 50% от веса робота) и характер грунта (часть поля, на котором проводились эксперименты, была покрыта стеклом, песком, линолеумом или другим материалом). Требовалось осуществить движение робота в автономном режиме по заданному (точнее, рассчитанному на более высоком уровне) маршруту.
Алгоритм адаптивного управления роботом состоит в определении оценок неизвестных параметров "идеального" закона управления (который существует, но неизвестен вследствие неполной информированности о характеристиках робота и среды) и в синтезе на основе текущих оценок закона управления исполнительными двигателями и механизмами. Для определения требуемых оценок применялись конечно-сходящиеся алгоритмы адаптации, рассматриваемые подробно в следующей главе. Заметим, что после того, как алгоритм адаптации сойдется к некоторой приемлемой оценке, построенное управление гарантирует осуществление движения по любому маршруту с требуемой точностью.
Аналогичные эксперименты по адаптивному управлению проводились и со второй моделью транспортного робота. При этом для сравнения эффективности различных схем управления, а именно: программного управления, используемого в роботах первого поколения, управления с обратной связью, используемого в очувствленных роботах, и, наконец, адаптивного управления, были проведены три серии экспериментов. Эти эксперименты показали, что программное управление в условиях априорной неопределенности не только не обеспечивает приемлемой точности отработки программных движений, но и приводит к накоплению погрешности в процессе движения. Управление с обратной связью позволяет довольно грубо (с большей принципиально неустранимой погрешностью) реализовать программное движение. Что же касается адаптивного управления, то оно при любой степени неопределенности позволяет осуществить программное движение практически с любой наперед заданной точностью, правда, по прошествии определенного времени адаптации.
Заканчивая описание проекта создания интеллектуального робота в Ленинградском университете, отметим, что в последнее время здесь разработано алгоритмическое и программное обеспечение для решения таких задач, как автоматическое планирование поведения робота, формирование понятий, распознавание и описание сложных изображений трехмерных сцен, а также формирование в памяти управляющей ЭВМ модели окружающей среды.
В Институте кибернетики АН УССР под руководством Н. М. Амосова и В. М. Глушкова ведется комплекс исследований, направленных на разработку элементов интеллекта роботов. Особое внимание в этих исследованиях уделяется проблемам распознавания изображений и речи, логического вывода (автоматического доказательства теорем) и управления с помощью нейроподобных сетей.
Опишем макет транспортного автономного интегрального робота (ТАИР), созданного в Институте кибернетики. Конструктивно ТАИР представляет собой трехколесное шасси, на котором смонтирована сенсорная система и блок управления. Сенсорная система включает в себя следующие средства очувствления: оптический дальномер, навигационная система с двумя радиомаяками и компасом, контактные датчики, датчики углов наклона тележки, таймер и др. Основу системы управления составляет бортовая нейроподобная сеть, на которой реализуются различные алгоритмы обработки сенсорной информации, планирования поведения и управления движением робота. В настоящее время ТАИР уже прошел первый тур испытаний, на которых он продемонстрировал способность к целенаправленному перемещению по реальной местности. Параллельно ведутся работы по созданию манипуляционного робота, снабженного телевизионным зрением, который в будущем может быть установлен на транспортный робот типа ТАИР.
Наряду с описанными выше проектами интеллектуальных роботов значительные достижения в этой области достигнуты в Вычислительном центре АН СССР, в Институте машиноведения АН СССР, в Московском университете, в Ленинградском институте авиационного приборостроения и в ряде других организаций как в СССР, так и в США, Японии и других развитых странах.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'