3.6. Элементы искусственного интеллекта роботов
Адаптивное управление роботами в общем случае не сводится только к автоматическому программированию и осуществлению Целенаправленных движений в условиях неопределенности. Наряду с решением этих чисто "двигательных" задач, робот должен уметь решать и задачи "интеллектуальные". Дело в том, что уже сегодня возникла необходимость в адаптивных роботах, обладающих способностью обучаться понятиям и распознавать классы сигналов или объектов. Так, при речевом управлении робот должен распознавать отдельные фонемы или команды; для автономного функционирования в незнакомой обстановке робот должен "видеть" препятствия и анализировать окружающую обстановку; для автоматической сборки изделий из деталей, поступающих навалом, робот должен не только идентифицировать нужную деталь, но и определять ее местоположение и ориентацию. Способность к обучению и распознаванию является важным, но не единственным элементом интеллекта робота. Среди других важнейших элементов можно выделить способности робота к моделированию внешней среды, к логическому анализу сложных заданий, к принятию решений и планированию собственных действий. В процессе функционирования робота указанные элементы искусственного интеллекта тесно взаимодействуют и определяют режим работы адаптивной системой управления движением. Это определяет необходимость иерархической организации процесса управления, который можно назвать интеллектным.
Многоуровневая иерархическая структура адаптивной системы с элементами искусственного интеллекта показана на рис. 3.25. При этом выделены два главных уровня управления: стратегический и тактический. На стратегическом уровне решаются задачи принятия решений и планирования поведения робота, а также задачи распознавания и моделирования внешней среды. На тактическом уровне осуществляется планирование и программирование движений робота (с учетом информации, заключенной в модели среды), а также синтезируются алгоритмы управления программным движением.
Роботы рассматриваемого типа относятся к третьему поколению. Они предназначены для автономного функционирования в условиях, многие из которых могут быть неизвестны конструктору. Более того, эти условия могут существенно меняться в процессе выполнения роботом определенных заданий. Поэтому весьма важное значение приобретают алгоритмические средства обучения и адаптации. Как видно из рис. 3.25, эти средства должны использоваться на каждом уровне иерархии системы интеллектного управления. Только в этом случае можно гарантировать достижение роботом заданных целей в заранее неизвестных и меняющихся условиях. Остановимся более подробно на том, какие функции возлагаются на отдельные элементы интеллекта роботов и каковы алгоритмы, обеспечивающие их нормальную работу. Прежде всего заметим, что общение робота с человеком осуществляется в режиме диалога через систему связи. Для формулирования роботу заданий человек обычно использует язык директив, представляющий собой упрощенную версию естественного языка.
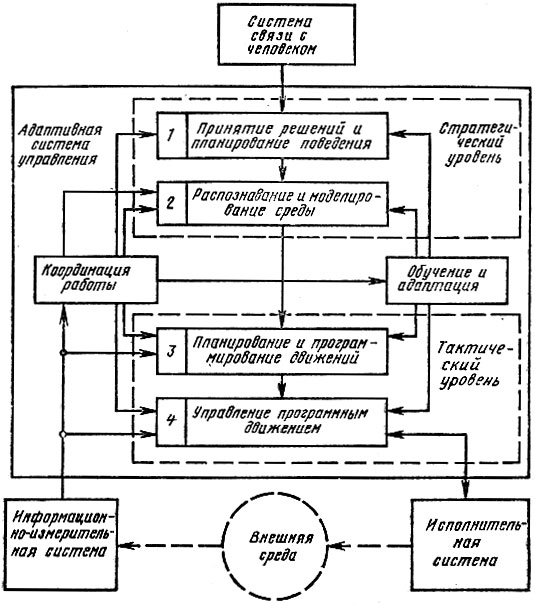
Рис. 3.25. Многоуровневая иерархическая структура адаптивной системы с элементами искусственного интеллекта
На первом уровне иерархической системы управления осуществляется планирование поведения робота и принятие соответствующих решений. Алгоритмы этого уровня (обычно это логические алгоритмы поиска решений) на основе данного роботу задания, а также информации, получаемой от сенсорной системы и нижних уровней иерархии, строят план действий, который ведет к достижению цели. Далее последовательно принимаются решения об отработке отдельных операций, реализующих "запланированное" поведение робота.
На втором уровне иерархии осуществляется распознавание сигналов и объектов, а также формирование понятий и модели внешней среды. Алгоритмы этого уровня осуществляют обучение робота понятиям-распознавание и анализ ситуаций - в соответствии с указаниями более высокого уровня. При этом существенно используется сенсорная информация. Полученные роботом знания обычно реализуются в форме семантических сетей-фреймов, распознающих графов и адаптивных решающих правил [44, 58, 63]. Процесс распознавания сигналов и анализа сцен зачастую сводится к поиску логического вывода [62, 63]. По мере формирования новых понятий в памяти робота строится и уточняется модель внешней среды. Эта информационная модель используется для организации и проведения "мысленных экспериментов" по выбору того или иного плана поведения робота еще до совершения им реальных действий.
Алгоритмы третьего уровня осуществляют предварительное планирование и построение программных движений исполнительных механизмов робота с учетом конструктивных ограничений и препятствий. В этом случае используют методы оптимизации на графах и вариационные методы.
Наконец, на четвертом (низшем) уровне синтезируются алгоритмы адаптивного управления приводами исполнительных механизмов, обеспечивающие фактическое осуществление построенного (на более высоком уровне) программного движения при наличии динамических возмущений и неопределенности.
Все перечисленные уровни иерархии функционально связаны между собой, а также с сенсорной и с исполнительной системами робота. Их согласованная работа обеспечивается специальным коммутатором - координатором. Реализация иерархических систем интеллектного управления требует обязательного использования ЭВМ и микропроцессоров. Это и понятно: ведь интеллектное управление невозможно рассчитать заранее. Децентрализованная структура этого управления позволяет распараллелить вычислительные процессы и распределить функции (элементы искусственного интеллекта) между различными ЭВМ и микропроцессорами, что особенно важно в отношении управления роботом в реальном времени.
Роботы с элементами искусственного интеллекта в настоящее время находятся еще в стадии разработки и исследования. Так, в Электротехнической лаборатории (Япония) разрабатывается проект создания манипуляционного робота с элементами искусственного интеллекта для выполнения сборочно-монтажных работ с визуальным контролем [30]. Манипулятор робота имеет шесть степеней свободы, а его захват оснащен тактильными датчиками. В качестве системы зрительного восприятия используют две телевизионные камеры, снабженные системой фильтров. Первая стадия обработки видеоинформации состоит в выделении контуров плоской оптической проекции реальных предметов, определении расстояния до них, цвета и текстуры. Полученные признаки используют в дальнейшем для распознавания и описания видимых предметов. Робот Электротехнической лаборатории способен распознавать только простые предметы и сцены при специальном освещении.
Центральная исследовательская лаборатория фирмы "Хитачи" (Япония) разработала экспериментальный образец робота с элементами искусственного интеллекта, способного производить сборку изделий по чертежу, Робот функционирует следующим образом [72 ]. Одна из телевизионных камер считывает и вводит в ЭВМ чертеж изделия, другая направлена на предметы, расположенные на сборочном столе, и вводит в ЭВМ плоскую оптическую проекцию видимой области. С помощью программ, реализующих элементы интеллекта робота, осуществляется распознавание неориентированных деталей, планирование процесса сборки и расчет требуемой последовательности программных движений. Серводвигатели манипулятора обеспечивают отработку программных движений и, как следствие, сборку изделия по чертежу из произвольно расположенных деталей. Следует отметить, однако, что пока такой робот успешно функционирует лишь при соблюдении ряда жестких ограничений на число и форму деталей, сложность чертежей и изделий, условия освещения предметов и т. д.
В Стенфордском исследовательском институте (США) создан макет подвижного робота с трехколесным шасси, оснащенный телевизионной камерой, оптическим дальномером, тактильными датчиками и бортовым логическим устройством [58, 65]. При этом основное внимание уделено созданию программ, позволяющих роботу формировать в памяти управляющей ЭВМ модель среды, планировать поведение, выбирать маршрут среди препятствий и осуществлять движение по нему. Там же создан интеллектный робот, который выполняет сборку "домиков" из "кубиков", простого электродвигателя и т. п.
В лаборатории искусственного мышления Массачусетского технологического института (США) создан макет интеллектного робота, который способен (после предварительного обучения на примерах) распознавать предметы простой формы и сооружать из них простейшие конструкции [58, 65].
Ряд интеллектных роботов разрабатывается и в нашей стране. Так, в Институте прикладной математики АН СССР и в Московском государственном университете созданы действующие макеты шестиногих мобильных роботов [47 ]. Они оснащены бортовой навигационной системой и оптическим дальномером для сбора информации о местности. Результаты измерений проходят несколько стадий фильтрации и интерпретации с целью выделения препятствий, определения проходимости местности и принятия решения о целесообразном характере движения с учетом реальных свойств рельефа. Богатая кинематика шестиногого шасси открывает широкие возможности для адаптации робота к сложному рельефу местности за счет автоматического выбора походки. Элементы интеллекта шагающего робота реализованы в виде программ, обеспечивающих решение следующих задач: распознавание и определение геометрических характеристик препятствий; координация ног; выбор трассы и мест постановки ног на местности; планирование движений и управление движением робота.
В Институте прикладной математики АН СССР ведутся также исследования, направленные на создание интеллектного сборочного робота. Этот робот, оснащенный двумя манипуляторами типа УЭМ-2, в настоящее время уже умеет, например, собирать масляный насос. Система управления робота, программно реализованная на ЭВМ М-6000, обладает элементами адаптации: в зависимости от результатов логического анализа текущей ситуации осуществляются пробные движения или коррекция программы движения манипуляторов. При этом используется минимальная, сенсорная информация - только позиционная обратная связь. Это свидетельствует о том, что адаптивное поведение сборочного робота можно организовать и без использования зрительного или силомоментного очувствления.
В МВТУ им. Н. Э. Баумана разрабатывается интеллектный робототехнический комплекс на базе ЭВМ "СМ-4" и "Электроника-60" [42, 51]. В качестве исполнительных механизмов здесь служат электромеханические антропоморфные манипуляторы типа УЭМ-5. Для получения данных об окружающей среде используются телевизионные камеры. Изображение сцены вводится в ЭВМ "СМ-4", где оно анализируется и интерпретируется для целей дальнейшего манипулирования объектами. При этом определяются форма объектов, их положение и ориентация. Это позволяет работать с произвольно расположенными деталями, контролировать правильность выполнения ранее запланированных операций и т. п. Специальная подпрограмма позволяет генерировать изображения сцены и манипулятора в разных ракурсах в зависимости от "точки зрения", указываемой оператором на экране дисплея. Программное обеспечение комплекса предусматривает решение ряда задач анализа сцен, планирования движений манипулятора и их надежной отработки с помощью следящих приводных систем. Значительное внимание уделяется также разработке и реализации принципов самонаведения захвата манипулятора с различными средствами очувствления (фотоматрица, телекамера, ультразвуковые датчики ближней локации), а также систем с силомоментным очувствлением.
В Ленинградском политехническом институте на основе опыта эксплуатации очувствленного "двухрукого" робота ЛПИ-2 с элементами адаптации разработан интеллектный робот УШИ-3. Этот робот оснащен техническим зрением и программными модулями для распознавания окружающих объектов и определения их положения в рабочей зоне манипулятора. Система управления движением реализуется на базе специализированного языка РОКОЛ и модульной алгоритмической системы "Барс", которая хорошо себя зарекомендовала при управлении исполнительными устройствами робота ЛПИ-2 [61, 65]. Предусматривается также возможность речевого управления роботом ЛПИ-3.
В Ленинградском государственном университете ведутся теоретические и экспериментальные работы в области создания элементов интеллекта для манипуляционных и транспортных роботов [61, 63, 68]. Основное внимание направлено на разработку адаптивных алгоритмов распознавания речевых сигналов и анализа трехмерных сцен, планирования, построения и оптимизации программных движений исполнительных механизмов и управления программным движением. Частично эти алгоритмы выполнены в системе интеллектного управления лабораторными макетами транспортных роботов с гусеничным и колесным шасси, программно реализованной на ЭВМ "Одра-1204". К числу элементов интеллекта можно отнести следующие программные модули: обработка сенсорной информации (главным образом, ;от ультразвуковых дальномеров), формирование модели окружающей среды, прокладка и оптимизация безопасного маршрута, построение программного движения самоходного шасси и адаптивное управление двигателями ведущих звездочек или колес. Согласованная работа указанных моделей обеспечивает целенаправленное поведение роботов на местности с заранее неизвестными препятствиями и меняющимися физико-механическими свойствами опорной поверхности. Разработанные алгоритмы находят применение и при проектировании интеллектных производственных систем. Так, адаптивные логические решающие правила и оптимальные распознающие графы легли в основу автоматов распознавания деталей трактора К-701 на подвесном толкающем конвейере ПО "Кировский завод" [64].
В Институте кибернетики АН УССР на основе макетов робота глаз - рука и транспортного робота "ТАИР" создаются элементы интеллекта для решения задач распознавания речевых команд, интерпретации содержания трехмерных сцен и планирования действий [13]. Отличительной особенностью системы машинного видения является то, что для анализа сцен одновременно используется фотометрическая система на базе телевизионной камеры и дальнометрическая система на базе лазерного дальномера. В настоящее время эта система позволяет обрабатывать за приемлемое время изображения как отдельных деталей, так и некоторых производственных сцен.
Итак, можно утверждать, что дальнейшее развитие робототехники в значительной степени связано с разработкой элементов и систем искусственного интеллекта. При этом решающее значение приобретает создание соответствующею алгоритмического и программного обеспечения. Появление достаточно мощных и дешевых ЦВМ и микропроцессоров обеспечит возможность реализации элементов интеллекта роботов и экономическую целесообразность их промышленного использования. Поэтому в будущем можно ожидать широкое применение роботов второго и третьего поколений в различных отраслях промышленности.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'