4. Основные виды двигателей постоянного тока
Различают (рис. 15) двигатели по:
- функциональному назначению - для приводов главного движения и подачи;
- типу системы возбуждения - с электромагнитным возбуждением и от постоянных магнитов;
- по быстродействию - нормального быстродействия и повышенного;
- по количеству оборотов на валу - высокооборотные и низкооборотные;
- по напряжению - высоковольтные и низковольтные;
- по инерционности - с большим и малым собственным моментом инерции;
- по типу конструкции - традиционные (с пазовым ротором), высокомоментные, с гладким якорем, с дисковым, полым ротором и др.;
- по способу защиты и охлаждения - защищенное с самовентиляцией, защищенное с независимой вентиляцией от постороннего вентилятора, закрытое с естественным охлаждением, закрытое с наружным обдувом.
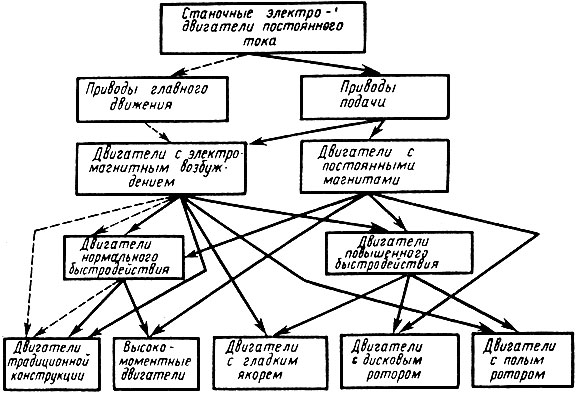
Рис. 15. Станочные электродвигатели постоянного тока
Электродвигатели приводов главного движения выполняют только с независимым электромагнитным возбуждением нормального быстродействия. Электромагнитное возбуждение позволяет регулировать скорость двигателя без изменения мощности (регулирование с постоянной мощностью). Двигатели приводов главного движения имеют традиционную пазовую конструкцию ротора, нормальное быстродействие и обычную систему возбуждения на статоре.
Двигатели постоянного тока электроприводов подач могут иметь как электромагнитное возбуждение, так и возбуждение от постоянных магнитов. Следует отметить, что в двигателях повышенного быстродействия с электромагнитной системой возбуждения в настоящее время якорь выполняют гладким и полым, а с возбуждением от постоянных магнитов - дисковым.
Электродвигатели постоянного тока с электромагнитным возбуждением и пазовым ротором применяли в станках производства 60-70-х годов. Эти двигатели имели большие габаритные размеры и собственный момент инерции, значительно превышающий приведенный момент инерции механизма. Кроме того, эти двигатели были высокооборотными, поэтому дополнительно устанавливали силовой редуктор.
Основными достоинствами двигателей с электромагнитным возбуждением и пазовым ротором являются большая тепловая постоянная времени, механическая прочность и высокая надежность. Быстродействие таких машин невелико из-за большого собственного момента инерции и невысокого динамического момента. Невысокий динамический момент обусловлен ограничением пускового тока по коммутационной способности двигателя, а также размагничивающим воздействием потока реакции якоря на поток главных полюсов.
Если в механизме подачи, содержащем редуктор, применен высокооборотный двигатель с большим моментом инерции, то привод имеет малую чувствительность к изменению нагрузки.
Низкооборотные двигатели, устанавливаемые непосредственно на винт, имеют суммарный момент инерции меньше, чем высокооборотные с редуктором. Поэтому изменение нагрузки сказывается сильнее на изменении скорости низкооборотного двигателя. Кроме того, отсутствие редуктора приводит к возрастанию потребного момента двигателя, вследствие чего он имеет большие габариты и массу.
В настоящее время в станках применяются двигатели с электромагнитным возбуждением общепромышленной серии 2П и станочной серии ПБСТ и ПСТ.
Двигатели с возбуждением от постоянных магнитов называют высокомоментными (рис. 16). Они имеют лучшие характеристики, чем двигатели с электромагнитным возбуждением. Так, высокомоментные двигатели имеют высокую тепловую постоянную времени (что обеспечивает возможность значительных перегрузок по току в кратковременном и повторно-кратковременном режимах), хорошее демпфирование (малую чувствительность к динамическим возмущениям по нагрузке и собственную устойчивость в переходных режимах) и достаточную механическую прочность (благодаря значительным размерам якоря и большому диаметру вала). Они более быстродействующие, так как способны кратковременно развивать большие вращающие моменты, обладают небольшой массой и габаритными размерами, большими номинальными вращающими моментами и собственными моментами инерции, в 2 - 3 раза превышающими момент инерции механизма.
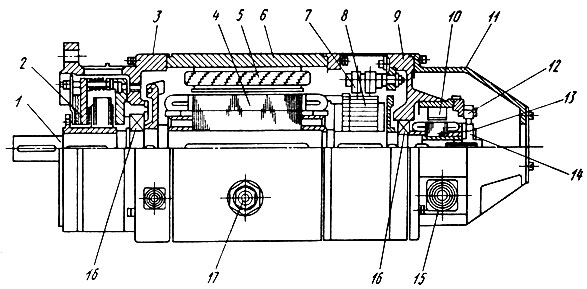
Рис. 16. Разрез высокомоментного двигателя (ВМД): 1 - вал двигателя, 2 - электромагнитный тормоз, 3 - передний щит, 4 - якорь двигателя, 5 - постоянные магниты возбуждения двигателя, 6 - корпус двигателя, 7 - щетки двигателя в щеткодержателе, 8 - коллектор двигателя, 9 - задний щит, 10 - постоянные магниты возбуждения тахогенератора, 11 - кожух тахогенератора, 12 - щетки тахогенератора в щеткодержателе, 13 - якорь тахогенератора, 14 - коллектор тахогенератора, 15 - штепсельный разъем тахогенератора, 16 - подшипник, 17 - рым-болт
Это позволяет устанавливать их непосредственно на винт. Отсутствие потерь на возбуждение снижает нагрев двигателя. Высота полюсов возбуждения этих двигателей меньше, чем при электромагнитном возбуждении. Поэтому двигатели с постоянными магнитами выполняются многополюсными, что улучшает равномерность магнитного поля в воздушном зазоре и равномерность вращения двигателя (особенно при малых скоростях), Кроме того, для улучшения равномерности частоты вращения двигателя увеличено число коллекторных пластин, использован специальный материал щеток, а в некоторых случаях и специальное покрытие коллектора.
При установке достаточно мощных магнитов с высокой коэрцитивной силой обеспечивается независимость потока возбуждения полюсов от тока якоря и возможность получения 10-кратных кратковременных моментов двигателя при малых скоростях, а следовательно, высокого быстродействия привода, определяемого отношением вращающего момента к моменту инерции.
При любом типе возбуждения двигателей с ростом скорости возрастает эдс в коммутируемых секциях якоря E = DIVn, где E - эдс в коммутируемой секции; B - индукция в воздушном зазоре; I - активная длина проводника; Vn - линейная скорость движения проводников ротора. При этом условия коммутации ухудшаются, что вызывает искрение под щетками на коллекторе.
В двигателях с электромагнитым возбуждением для улучшения условий коммутации устанавливают либо дополнительные полюса, обмотка которых обтекается током якоря, либо на основные полюса наматывают дополнительную силовую обмотку, включенную последовательно с обмоткой якоря. Поток дополнительных полюсов компенсирует реакцию якоря и улучшает условия коммутации, тем самым получают практически одинаковый максимально допустимый ток независимо от скорости двигателя.
В высокомоментных двигателях обмотка дополнительных полюсов, как правило, отсутствует. Поэтому с ростом скорости резко снижается допустимый по условию коммутации ток якоря.
В качестве магнитных материалов для индуктора высокомоментных двигателей наиболее широко применяют спекаемые металлокерамические магниты, изготовленные из оксидов железа с добавлением бария или стронция, реже - сплавные магниты из альнико (AlNiCo) - материала с высокой индукцией и, наконец, магниты с добавлением редкоземельных элементов (самарий-кобальтовые магниты). Последние обладают самой высокой магнитной энергией, однако весьма дефицитны и дороги.
Высокомоментные двигатели исполняются закрытыми либо с естественным охлаждением, либо с принудительной вентиляцией.
Мы рассматривали высокомоментные двигатели традиционного исполнения, у которых магниты расположены на статоре, а обмотка - на роторе.
Высокомоментные двигатели называются обращенными, если обмотка размещена на статоре, а магниты - на роторе. При такой конструкции двигателей улучшаются условия охлаждения, что позволяет уменьшить их габаритные размеры и массу. Существенным недостатком двигателей обращенной конструкции является усложнение щеточного узла при неподвижном коллекторе и снижение максимальной скорости, особенно для средних и больших машин с высокими коммутируемыми токами.
Отечественная промышленность выпускает несколько модификаций высокомоментных двигателей. К ним относятся маломощные двигатели серий ДП, ДПУ и ДК, двигатели средней и большой мощности серии ПВ.
Как упоминалось ранее, одним из специализированных видов станочных электродвигателей являются малоинерционные.
К малоинерционным беспазовым относятся двигатели с гладким полым и дисковым (штампованным или печатным) якорем.
Малоинерционные двигатели с гладким, дисковым и полым якорями имеют собственный момент инерции, значительно меньший момента инерции механизма, и выполняются, как правило, высокооборотными. При установке силового редуктора возможно согласовать моменты инерции и динамические моменты на винте и на валу двигателя
Малоинерционные двигатели имеют невысокую электромеханическую постоянную времени вследствие небольшого диаметра гладкого якоря или малой массы дискового и полого немагнитного якорей. Кроме того, они имеют электромагнитную постоянную времени, меньшую, чем у других двигателей, из-за малой индуктивности обмотки беспазового или немагнитного якоря. Снижение индуктивности якоря позволяет также увеличивать динамические токи без ухудшения условий коммутации.
Эти особенности малоинерционных двигателей обусловливают их высокое быстродействие. Ускорения, развиваемые ими, достигают 20 000 - 50 000 1/с2.
Собственная частота малоинерционных двигателей значительно превышает собственную частоту других двигателей, что позволяет существенно увеличить быстродействие электропривода, а следовательно, повысить производительность станков и улучшить качество обработки деталей.
Однако быстродействие малоинерционных двигателей не всегда может быть реализовано. В ряде случаев снижение собственного момента инерции двигателя приводит к отрицательным последствиям: так как собственная частота электропривода и механизма становятся соизмеримыми, возможно появление резонансных явлений и, как следствие, выход из строя узла и поломка инструмента. Кроме того, малые собственные моменты инерции и большие ускорения, развиваемые малоинерционными двигателями, вызывают в механических передачах большие динамические усилия (а при наличии зазоров и удары), которые могут привести к поломке передачи. Малые моменты инерции увеличивают чувствительность привода к динамическому изменению момента нагрузки. При этом возрастает неравномерность вращения двигателя и перемещения механических узлов (особенно на малых подачах). При наличии даже незначительных зазоров в механической передаче электропривод работает с переменным моментом инерции, причем переменный момент может существенно превышать собственный момент инерции двигателя. В результате привод становится трудно-управляемым.
Отмеченные свойства малоинерционных двигателей приводят к ужесточению требований к конструкции и качеству сборки станков и усложнению систем стабилизирующих устройств привода.
Малоинерционные двигатели имеют малую термическую постоянную времени (несколько минут) и невысокую механическую прочность, что снижает общую надежность двигателя, привода и станка в целом.
Электродвигатели с дисковым печатным или штампованным якорем изготовляют многополюсными с возбуждением от постоянных магнитов, а с гладким якорем - в основном двухполюсными с электромагнитным возбуждением. Мощность, потребляемая обмоткой возбуждения двигателя с гладким якорем, и нагрев за счет потерь возбуждения велики из-за увеличенного воздушного зазора между системой возбуждения и ротором. В связи с этим необходимо устанавливать вентилятор-наездник. Пристройка к двигателю вентилятора-наездника увеличивает габариты, вибрацию и шум двигателя, а также вызывает дополнительное загрязнение коллектора и снижение надежности работы двигателя.
Малоинерционные двигатели с возбуждением от постоянных магнитов более перспективны для станков повышенной точности.
Малоинерционные дисковые электродвигатели с возбуждением от постоянных магнитов недолговечны из-за недостаточной механической прочности дискового коллектора. Известны двигатели с дисковым ротором, но цилиндрическим коллектором. Они имеют несколько больший момент инерции, но более надежны. Кроме того, их удобно встраивать в механизмы станков, роботов и т. д. (из-за малых осевых размеров).
Отечественной промышленностью выпускаются малоинерционные электродвигатели с гладким якорем и электромагнитным возбуждением серии ПГТ и с дисковым якорем серий ДПУ и ПЯ. Как указывалось ранее, двигатели различаются по способу защиты и охлаждения.
Защищенные электродвигатели с самовентиляцией характеризуются существенным снижением допустимых нагрузок при уменьшении скорости, так как при этом ухудшаются условия охлаждения. При широком диапазоне регулирования эти двигатели либо не применяются, либо применяются с запасом по номинальному току (моменту, мощности).
На защищенные электродвигатели с независимой вентиляцией устанавливают дополнительный вентилятор (осевой или наездник), что увеличивает габаритные размеры, усложняет встройку двигателя в механизм и требует дополнительной балансировки. Эти двигатели устанавливаются в механизмах главного движения, достаточно удаленных от зоны резания.
Закрытые электродвигатели могут работать с полной нагрузкой во всем диапазоне регулирования скорости, но имеют большие габаритные размеры по сравнению с защищенными. Однако при широком диапазоне регулирования закрытых машин требуется увеличивать их установленную мощность (момент), поэтому при правильном выборе закрытых и защищенных двигателей их габаритные размеры приблизительно одинаковы.
Закрытые двигатели можно устанавливать вблизи зоны резания, поэтому такие электродвигатели с естественным охлаждением широко применяют в механизмах подач металлорежущих станков.
Применение закрытых электродвигателей с наружным обдувом целесообразно лишь для достаточно больших моментов.
Несмотря на перечисленные выше достоинства двигателей постоянного тока, в последнее время наблюдается тенденция замены их двигателями переменного тока в приводах станков с ЧПУ и роботов. Это обусловлено наличием механического щеточно-коллекторного узла, снижающего надежность машины и накладывающего ограничения на возможность работы в условиях агрессивной окружающей среды. Щеточно-коллекторный узел требует проведения регулярных профилактических осмотров и ремонтов. Кроме того, он не позволяет полностью автоматизировать производство электродвигателей постоянного тока. В силу этого создают широкорегулируемые станочные электроприводы с двигателями переменного тока. Отсутствие подвижных механических узлов позволяет устанавливать эти двигатели в условиях любой окружающей среды, повышать их надежность и полностью автоматизировать процесс их производства. Кроме того, эти двигатели не требуют проведения профилактических осмотров и ремонтов, что позволяет их устанавливать на станки, работающие в гибких производственных системах.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'