II. Тиристорный электропривод и электродвигатели постоянного тока
3. Тиристорные электроприводы постоянного тока
В настоящее время в отечественных станках с ЧПУ и промышленных роботах наибольшее распространение имеют тиристорные электроприводы постоянного тока. Изучение принципа действия такого достаточно сложного устройства невозможно без детального разбора его узлов. Наиболее труден для понимания принцип действия тиристорного преобразователя. Поэтому вначале ознакомимся с основным элементом преобразователя - тиристором, после чего на примере упрощенного тиристорного преобразователя проследим совместную работу тиристорного преобразователя и двигателя при регулировании скорости последнего. Далее, постепенно усложняя схемы тиристорных преобразователей, рассмотрим принцип работы электроприводов, установленных в станках с ЧПУ и роботах.
Итак, тиристор - это полупроводниковый прибор с неполным управлением.
Отпирание тиристора может производиться подачей напряжения определенной формы на цепи: управляющий электрод - катод. При этом полярность напряжения, подаваемого на силовую цепь тиристора, должна быть такой, чтобы анод имел положительный потенциал относительно катода.
Ток силовой цепи может протекать только в одном направлении.
Запирание тиристора производится только по силовой цепи. Сопротивление закрытого тиристора велико  , открытого - мало
, открытого - мало  . После того как тиристор открылся, он не реагирует на сигналы управления.
. После того как тиристор открылся, он не реагирует на сигналы управления.
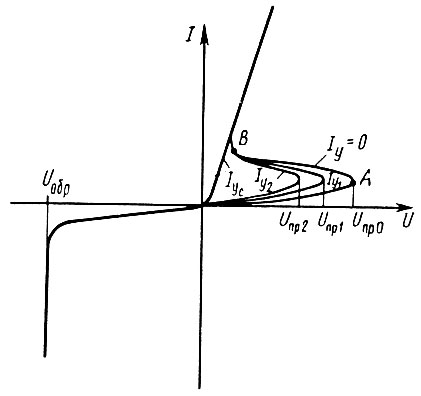
Рис. 4. Вольт-амперная характеристика тиристора
Зависимость между током, протекающим по силовой цепи тиристора, и напряжением может быть проиллюстрирована вольт-амперной характеристикой, представленной на рис. 4. При отсутствии напряжения, подаваемого на управляющую цепь тиристора, и при наличии напряжения любой полярности на силовой цепи тиристор практически закрыт. Так, при обратной полярности напряжения, не превышающего по величине обратное напряжение  в силовой цепи протекают малые токи в обратном направлении
в силовой цепи протекают малые токи в обратном направлении  При превышении этого уровня напряжения ток резко нарастает и возникает аварийный режим, называемый обратным пробоем. При напряжении прямой полярности, не превышающем прямое напряжение
При превышении этого уровня напряжения ток резко нарастает и возникает аварийный режим, называемый обратным пробоем. При напряжении прямой полярности, не превышающем прямое напряжение  ток практически отсутствует. Превышение этого напряжения также приводит к аварийной ситуации.
ток практически отсутствует. Превышение этого напряжения также приводит к аварийной ситуации.
Представленное на рис. 4 семейство характеристик при напряжении прямой полярности характеризует поведение тиристора при различных уровнях силового напряжения. Как следует из рисунка, чем меньше анодное (силовое) напряжение, тем больший ток управления необходим для переключения тиристора. Падение напряжения на тиристоре не превышает 0,5-1,2 В, а процесс отпирания происходит за 15 - 20 мкс.
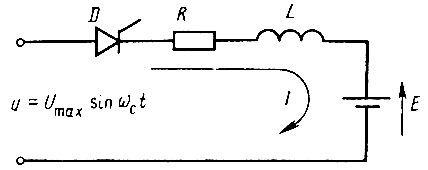
Рис. 5. Эквивалентная схема однополупериодного тиристорного преобразователя
Далее рассмотрим совместную работу упрощенного тиристорного преобразователя с двигателем постоянного тока. В электрической схеме двигатель может быть представлен в виде эквивалентной нагрузки, соединяющей эдс, активное R и индуктивное L сопротивления. На рис. 5 представлена схема однофазного однополупериодного преобразователя, работающего на двигатель постоянного тока, а на рис. 6 - диаграмма напряжений и тока в этой схеме. На вход схемы подается синусоидальное напряжение  где u - мгновенное значение напряжения,
где u - мгновенное значение напряжения,  - амплитуда,
- амплитуда,  - частота питающей сети.
- частота питающей сети.
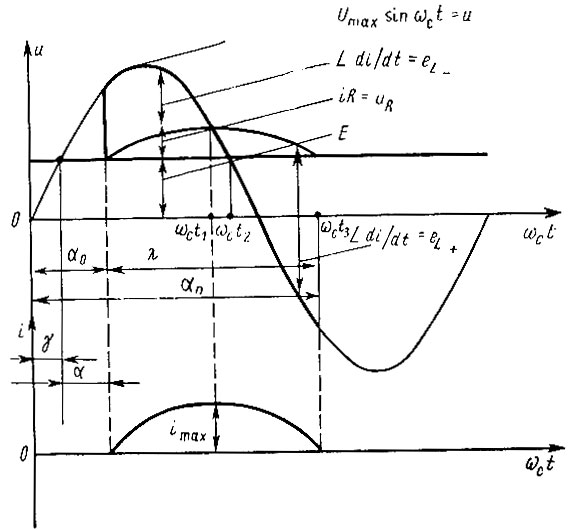
Рис. 6. Диаграмма напряжений и тока для однополупериодного тиристорного преобразователя
Если в полупериод положительного анодного напряжения на управляющий электрод тиристора подать импульсный сигнал в момент времени, соответствующий углу  (где
(где  - угол отпирания, отсчитываемый от начала синусоиды анодного напряжения), то тиристор открывается и через нагрузку протекает ток i. В цепи устанавливается баланс напряжений: напряжение питания
- угол отпирания, отсчитываемый от начала синусоиды анодного напряжения), то тиристор открывается и через нагрузку протекает ток i. В цепи устанавливается баланс напряжений: напряжение питания  уравновешивается падением напряжения на активном сопротивлении
уравновешивается падением напряжения на активном сопротивлении  эдс электромагнитной индукции
эдс электромагнитной индукции  и противо-эдс двигателя E.
и противо-эдс двигателя E.

В интервале  ток в нагрузке протекает под действием положительного анодного напряжения. Ток возрастает, эдс электромагнитной индукции
ток в нагрузке протекает под действием положительного анодного напряжения. Ток возрастает, эдс электромагнитной индукции  отрицательна и направлена навстречу току. В момент
отрицательна и направлена навстречу току. В момент  нарастание тока прекращается,
нарастание тока прекращается,  В интервале
В интервале  где
где  - угол запирания, ток начинает уменьшаться, эдс электромагнитной индукции изменяет знак и, действуя совместно с уменьшающимся анодным напряжением, поддерживает ток в нагрузке.
- угол запирания, ток начинает уменьшаться, эдс электромагнитной индукции изменяет знак и, действуя совместно с уменьшающимся анодным напряжением, поддерживает ток в нагрузке.
Ток через тиристор протекает в интервале  при суммарном отрицательном напряжении питания и противо-эдс двигателя, а в интервале
при суммарном отрицательном напряжении питания и противо-эдс двигателя, а в интервале  даже при отрицательном переменном напряжении питания за счет положительного значения эдс электромагнитной индукции, превышающего сумму u + E. При угле
даже при отрицательном переменном напряжении питания за счет положительного значения эдс электромагнитной индукции, превышающего сумму u + E. При угле  тиристор закрывается. Длительность протекания тока в тиристоре λ зависит от электромагнитной энергии W, накапливаемой в индукции цепи нагрузки, и величины тока:
тиристор закрывается. Длительность протекания тока в тиристоре λ зависит от электромагнитной энергии W, накапливаемой в индукции цепи нагрузки, и величины тока:  На форму тока в нагрузке влияет электромагнитная постоянная времени
На форму тока в нагрузке влияет электромагнитная постоянная времени 
Величина выпрямленного напряжения, подаваемого на двигатель и изменяющего его скорость, определяется как разность площадей кривой  лежащих выше и ниже оси абсцисс в пределах угла λ. Меняя угол отпирания а, можно регулировать выпрямленное напряжение от нуля (при a0 = 1800 эл. град) до некоторой максимальной величины, которая определяет максимальную частоту вращения двигателя и зависит от схем включения преобразователей. Схемы различаются как по количеству фаз, так и по конфигурации включения тиристоров. В зависимости от количества фаз различают одно-, двух-, трех- и шестифазные схемы, по включению тиристоров - нулевые и мостовые. На рис. 7, а-д представлены нулевые одно-, трех- и шестифазные схемы преобразователей, а также мостовые одно- и трехфазные. Эти схемы нашли наибольшее применение в приводах. Для каждой из представленных схем, минимальный угол управления преобразователем amin, при котором выпрямленное напряжение, подаваемое на двигатель, имеет наибольшее значение, различен. Для расчета amin необходимо иметь осциллограммы выпрямленного напряжения. Они представлены на рис. 8 с учетом разного числа фаз m (m = 2, m = 3 и m = 6).
лежащих выше и ниже оси абсцисс в пределах угла λ. Меняя угол отпирания а, можно регулировать выпрямленное напряжение от нуля (при a0 = 1800 эл. град) до некоторой максимальной величины, которая определяет максимальную частоту вращения двигателя и зависит от схем включения преобразователей. Схемы различаются как по количеству фаз, так и по конфигурации включения тиристоров. В зависимости от количества фаз различают одно-, двух-, трех- и шестифазные схемы, по включению тиристоров - нулевые и мостовые. На рис. 7, а-д представлены нулевые одно-, трех- и шестифазные схемы преобразователей, а также мостовые одно- и трехфазные. Эти схемы нашли наибольшее применение в приводах. Для каждой из представленных схем, минимальный угол управления преобразователем amin, при котором выпрямленное напряжение, подаваемое на двигатель, имеет наибольшее значение, различен. Для расчета amin необходимо иметь осциллограммы выпрямленного напряжения. Они представлены на рис. 8 с учетом разного числа фаз m (m = 2, m = 3 и m = 6).
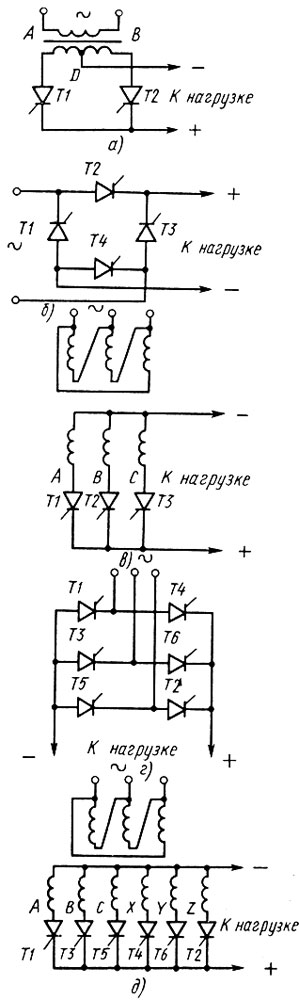
Рис. 7. Схемы (а - д) однокомплектных тиристорных преобразователей: а - однофазный нулевой двухполупериодный, б - однофазный мостовой, в - трехфазный нулевой, г - трехфазный мостовой, д - шестифазный нулевой
Для любого числа фаз выпрямителя  - угол естественного отпирания определяется по формуле
- угол естественного отпирания определяется по формуле 
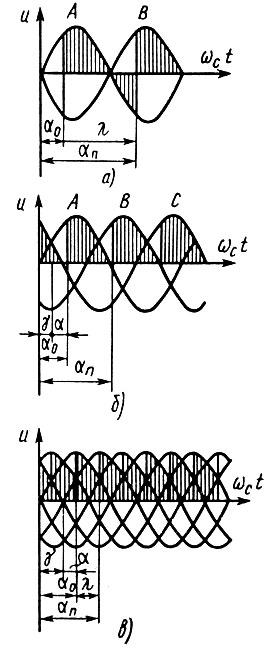
Рис. 8. Диаграммы напряжений для двух- (а), трех- (б) и шести-фазных (в) тиристорных преобразователей: a0 - угол отпирания, отсчитываемый от начала синусоиды силового анодного напряжения, an - угол запирания, λ - продолжительность включения тиристора, γ - угол естественного отпирания, a - угол отпирания, отсчитываемый от точки естественного отпирания, a = a0 - γ - заштрихованная область соответствует напряжению на нагрузке без противо-эдс
Угол, отсчитываемый от точки естественного отпирания, обозначают a. Он связан с углом, отсчитываемым от начала синусоиды, соотношением  При наличии противо-эдс в нагрузке тиристоры не смогут открыться в точке естественного отпирания, так как при
При наличии противо-эдс в нагрузке тиристоры не смогут открыться в точке естественного отпирания, так как при  мгновенное значение положительного напряжения источника
мгновенное значение положительного напряжения источника  меньше отрицательной противо-эдс двигателя, что создает на аноде тиристора отрицательный запирающий потенциал.
меньше отрицательной противо-эдс двигателя, что создает на аноде тиристора отрицательный запирающий потенциал.
Минимальный угол отпирания amin тиристорного преобразователя, работающего на противо-эдс, определяется из условия равенства положительного мгновенного напряжения источника и отрицательной противо-эдс двигателя:
Противо-эдс двигателя при максимальной скорости, соответствующей минимальному углу регулирования, приблизительно равна среднему значению выпрямленного напряжения 

где - число фаз тиристорного преобразователя;  - максимальный угол работы тиристора.
- максимальный угол работы тиристора.
С помощью этой формулы можно определить максимальное значение выпрямленного напряжения  при отпирании тиристоров в точке естественного зажигания, соответствующей углу γ, и минимальный допустимый угол регулирования amin. Знание величины amin необходимо для правильной настройки системы управления тиристорным преобразователем. Если угол управления a<amin, то возможен аварийный режим работы преобразователя с выходом из строя силовых элементов-тиристоров. Отношение же
при отпирании тиристоров в точке естественного зажигания, соответствующей углу γ, и минимальный допустимый угол регулирования amin. Знание величины amin необходимо для правильной настройки системы управления тиристорным преобразователем. Если угол управления a<amin, то возможен аварийный режим работы преобразователя с выходом из строя силовых элементов-тиристоров. Отношение же  позволяет сопоставить технико-экономические показатели тиристорных преобразователей с разным количеством фаз m. В табл. 1 приведены значения
позволяет сопоставить технико-экономические показатели тиристорных преобразователей с разным количеством фаз m. В табл. 1 приведены значения  для двух-, трех- и шестифазных тирис-торных преобразователей.
для двух-, трех- и шестифазных тирис-торных преобразователей.
Таблица 1. Некоторые технико-экономические показатели двух-, трех- и шестифазных тиристорных преобразователей
Для правильного построения системы управления преобразователем необходимо знать угол управления, при котором выпрямленное напряжение (а следовательно, и скорость двигателя) равно нулю:  и
и 
Интересно, что для всех трех случаев угол а одинаков и равен a = 90°.
Таким образом, мы определили диапазон изменения угла управления при изменении скорости от нуля до максимальной.
Статические и динамические характеристики тиристорного электропривода зависят от формы тока, протекающего через двигатель. Как было показано ранее (см. рис. 6), ток через тиристор и двигатель протекает даже в то время, когда напряжение питания отрицательно, что объясняется действием эдс самоиндукции: 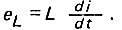
Продолжительность включения тиристора λ зависит от энергии, запасенной в индуктивности нагрузки, и от числа фаз преобразователя. Если этой энергии недостаточно, то ток прекратится раньше, чем откроется следующий тиристор, и ток в нагрузке будет иметь разрывы - так называемый режим прерывистого тока (рис. 9, а). Чтобы уменьшить пульсации тока в нагрузке, следует увеличить ее индуктивность, установив последовательно с якорем двигателя дополнительный сглаживающий дроссель. При этом продолжительность включения тиристора увеличится и ток станет начально-непрерывным (рис. 9, б) или непрерывным (рис. 9, в).
Рис. 9. Ток в нагрузке в режимах прерывистом (а), начально-непрерывном (б) и непрерывном (в)
С точки зрения экономичности электропривода и простоты управления им наиболее благоприятен непрерывный характер изменения тока, протекающего через двигатель.
Максимальная продолжительность включения λ равна периоду пульсации выходного (выпрямленного) напряжения тиристорного преобразователя:
Рассмотренные выше тиристорные преобразователи допускали протекание тока через двигатель лишь в одном направлении, что при неизменном потоке возбуждения приводит к вращению его только в одну сторону. Электроприводы, устанавливаемые в станках с ЧПУ и роботах, способны вращаться в двух противоположных направлениях. Такие приводы принято называть реверсивными. Для того чтобы двигатель вращался в обе стороны, в преобразователе должны быть два комплекта тиристоров, каждый из которых дает свое направление тока, протекающего через двигатель.
Двухкомплектные приводы могут работать во всех четырех квадрантах (рис. 10).
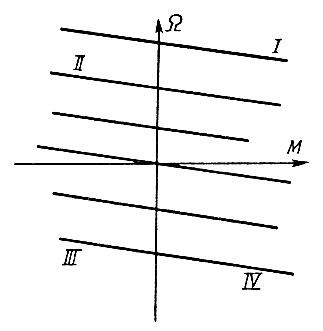
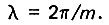
Рис. 10. Механические характеристики реверсивного (четырехквадрантного) электропривода
В I и III квадрантах тиристорный преобразователь работает в выпрямительном режиме: скорость и момент (ток) имеют одинаковый знак; во II и IV квадрантах ток изменяет свое направление и преобразователь работает в инверторном режиме с отдачей энергии в сеть. При работе в IV квадранте направления момента и скорости также противоположны, знак тока соответствует выпрямительному режиму, преобразователь работает в режиме противотока.
Реверсивные двухкомплектные тиристорные преобразователи могут быть построены по двум принципам - с совместным или раздельным управлением. При совместном управлении открыты тиристоры обеих групп. При этом в каждый момент времени одна группа тиристоров работает в выпрямительном режиме, другая - в инверторном. Ток нагрузки протекает через выпрямительную группу и определяется разностью напряжения на выпрямителе и противо-эдс двигателя:

При торможении противо-эдс двигателя не может сразу уменьшиться вследствие инерционности маховых масс двигателя и нагрузки. Напряжение на выходе безынерционного тиристорного преобразователя изменяется практически мгновенно.
Противо-эдс двигателя становится больше напряжения на выпрямителе; под действием противо-эдс тиристоры выпрямительной группы запираются. Ток в двигателе изменяет свое направление и становится тормозным. Он протекает через инверторную группу под действием разности противо-эдс двигателя и напряжения на инверторе:  Упрощенная силовая схема реверсивного тиристорного электропривода при совместном управлении приведена на рис. 11.
Упрощенная силовая схема реверсивного тиристорного электропривода при совместном управлении приведена на рис. 11.
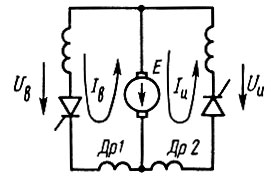
Рис. 11. Упрощенная силовая схема реверсивного тиристорного электропривода
Среднее значение выпрямленного напряжения для выпрямительной и инверторной групп одинаково в том случае, если соблюдено равенство:  где aи, aв - соответственно углы отпирания тиристоров инвертора и выпрямителя, отсчитываемые от точки естественного отпирания. В этом случае отсутствует постоянная составляющая в цепи уравнительного тока
где aи, aв - соответственно углы отпирания тиристоров инвертора и выпрямителя, отсчитываемые от точки естественного отпирания. В этом случае отсутствует постоянная составляющая в цепи уравнительного тока  что является одним из условий нормального режима работы преобразователя. Это условие реализуется системой управления преобразователя.
что является одним из условий нормального режима работы преобразователя. Это условие реализуется системой управления преобразователя.
Так как система управления преобразователем имеет разброс выходных параметров, то реально для надежного исключения постоянной составляющей уравнительного тока начальный угол регулирования на несколько градусов больше теоретического, при котором соблюдается равенство средних значений напряжений на выпрямительной и инверторной группах. В приводе всегда поддерживается неравенство, при котором модуль среднего напряжения (+) меньше модуля среднего напряжения (-).
Поэтому разность средних значений напряжений групп имеет направление, противоположное напряжению проводимости тиристоров в контуре уравнительного тока. Чем больше неравенство  тем меньше уравнительные токи, но тем больше зона нечувствительности в регулировочной характеристике преобразователя
тем меньше уравнительные токи, но тем больше зона нечувствительности в регулировочной характеристике преобразователя  и тем мягче характеристика привода в зоне малых сигналов (где
и тем мягче характеристика привода в зоне малых сигналов (где  - сигнал управления на входе преобразователя).
- сигнал управления на входе преобразователя).
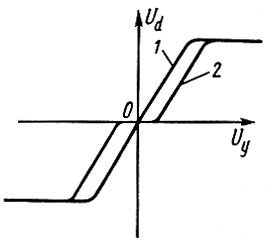
Рис. 12. Регулировочные характеристики реверсивного тиристорного преобразователя
На рис. 12 показаны регулировочные характеристики реверсивного тиристорного преобразователя, представляющие зависимость выпрямленного напряжения  от сигнала управления U на входе преобразователя: для
от сигнала управления U на входе преобразователя: для  кривая 1 и для
кривая 1 и для  - кривая 2.
- кривая 2.
Кривой 1 соответствует 
Кривой 2 соответствует 
Принцип действия двухкомплектного тиристорного электропривода с совместным управлением рассмотрим на примере реверсивной однофазной двухполупериодной схемы преобразователя как наиболее простой. На рис. 13, а представлена диаграмма мгновенных значений выпрямленного напряжения выпрямительной и инверторной групп тиристоров (соответственно вертикальная и горизонтальная штриховка) и соответствующая ей разность мгновенных значений при углах управления 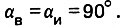
Угол управления, при котором среднее выпрямленное напряжение равно нулю, принято называть начальным  При регулировании скорости двигателя, питаемого от тиристорного преобразователя с совместным управлением, угол управления выпрямительной группы смещается влево от
При регулировании скорости двигателя, питаемого от тиристорного преобразователя с совместным управлением, угол управления выпрямительной группы смещается влево от  а инверторной - вправо.
а инверторной - вправо.
На рис. 13, б представлены аналогичные графики, но для других углов управления: 
Величина среднего выпрямленного напряжения, как уже упоминалось, определяет скорость двигателя, а разность мгновенных значений - величину тока, протекающего по уравнительному контуру.
Рис. 13. Кривые напряжений на выпрямителе, инверторе и уравнительных реакторах: а - aв = aн = aнач = 90°; б - aв = 45° и aн = 180-45 = 135°
Как следует из рис. 13, а, среднее выпрямленное напряжение равно нулю, а амплитуда разности напряжений - наибольшая. На рис. 13, б среднее напряжение отлично от нуля, а форма разностного напряжения и его амплитуда существенно отличаются от приведенного ранее.
Уравнительный ток между группами тиристоров ограничивается индуктивным сопротивлением дросселей Др1 и Др2. Вследствие вентильных свойств тиристоров уравнительный ток между группами однонаправленный - от катодной группы (+) к анодной (-).
В станках с ЧПУ и роботах применяются реверсивные тиристорные электроприводы постоянного тока как с совместным, так и с раздельным управлением преобразователем. В последнем случае необходимы также два комплекта тиристоров, но в каждый момент времени работает только один из них. В таком случае отсутствует контур уравнительного тока и отпадает необходимость в применении уравнительных дросселей Др1 и Др2, что уменьшает расход меди и электротехнической стали. Однако наряду с этим ухудшаются энергетические характеристики двигателя и существенно усложняется алгоритм управления преобразователем, что усложняет наладку и обслуживание электропривода. Технические характеристики обоих видов электроприводов примерно одинаковы. Поэтому выбор того или иного вида зависит от конкретных требований.
В состав тиристорного электропривода, как уже указывалось, помимо двигателя и преобразователя входят либо токоограничивающие реакторы, либо трансформаторы. Они служат для подключения преобразователя к питающей сети.
Токоограничивающие реакторы ограничивают токи короткого замыкания и снижают скорость изменения тока в нагрузке  Трансформатор служит для согласования напряжения сети с напряжением двигателя. В результате этого повышается коэффициент мощности привода при больших скоростях и снижается амплитуда пульсаций напряжения на якоре двигателя, что положительно сказывается на работе постоянных магнитов возбуждения и облегчает коммутацию двигателей. Кроме того, трансформатор так же, как и реакторы, ограничивает ток короткого замыкания и снижает скорость изменения тока в тиристорах, а также уменьшает влияние помех сети и других источников на работу привода.
Трансформатор служит для согласования напряжения сети с напряжением двигателя. В результате этого повышается коэффициент мощности привода при больших скоростях и снижается амплитуда пульсаций напряжения на якоре двигателя, что положительно сказывается на работе постоянных магнитов возбуждения и облегчает коммутацию двигателей. Кроме того, трансформатор так же, как и реакторы, ограничивает ток короткого замыкания и снижает скорость изменения тока в тиристорах, а также уменьшает влияние помех сети и других источников на работу привода.
Типовая функциональная схема регулируемого тиристорного электропривода показана на рис. 14.
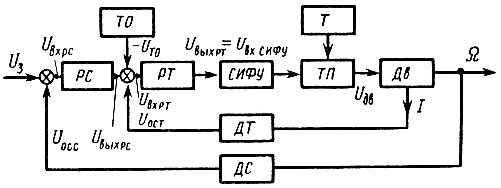
Рис. 14. Типовая функциональная схема тиристорного электропривода
На входе первого сумматора алгебраически суммируются сигнал задания скорости  и сигнал отрицательной обратной связи по скорости
и сигнал отрицательной обратной связи по скорости  с датчика скорости ДС. Эта разность из
с датчика скорости ДС. Эта разность из  поступает на вход регулятора скорости PC. С выхода PC напряжение Uвых PC передается во второй сумматор, где оно суммируется с сигналом отрицательной обратной связи по току
поступает на вход регулятора скорости PC. С выхода PC напряжение Uвых PC передается во второй сумматор, где оно суммируется с сигналом отрицательной обратной связи по току  с датчика тока ДТ. Сигнал с выхода регулятора тока РТ подается на вход системы импульсно-фазового управления СИФУ. Величина и знак этого напряжения определяют величину и знак напряжения на выходе тиристорного преобразователя ТП, а следовательно, скорость Ω и направление вращения двигателя Дв.
с датчика тока ДТ. Сигнал с выхода регулятора тока РТ подается на вход системы импульсно-фазового управления СИФУ. Величина и знак этого напряжения определяют величину и знак напряжения на выходе тиристорного преобразователя ТП, а следовательно, скорость Ω и направление вращения двигателя Дв.
Переменное сетевое напряжение через силовой трансформатор Т поступает на тиристорный преобразователь ТП, выполненный по принципу раздельного или совместного управления. Управляющее напряжение на тиристоры подается от системы импульсно-фазового управления СИФУ. Система импульсно-фазового управления служит для формирования управляющих импульсов, распределения их по тиристорам и регулирования их фазы.
Структурно система импульсно-фазового управления состоит из компаратора, усилителя-формирователя и импульсного трансформатора. На вход компаратора поступают опорное напряжение и управляющее напряжение с выхода регулятора тока. Компаратор формирует двухполярное напряжение переменной скважности, которая зависит от уровня и знака управляющего напряжения. Компаратор строится на аналоговом интегральном усилителе без обратных связей.
Усилитель-формирователь преобразует напряжение на выходе компаратора в серию однополярных узких импульсов постоянной амплитуды и ширины, фаза импульсов зависит от величины скважности сигнала на выходе компаратора. Усилитель-формирователь строится на биполярных транзисторах и резистивно-емкостных цепях.
Импульсный трансформатор гальванически разделяет силовую часть преобразователя и систему управления.
Таким образом, система импульсно-фазового управления преобразует двухполярное аналоговое напряжение на выходе регулятора тока в серию импульсов прямоугольной формы, поступающих на управляющие электроды тиристоров в требуемой фазе.
С помощью регуляторов тока и скорости, как уже упоминалось, достигаются необходимые статические и динамические характеристики тиристорного привода.
Статические характеристики этого привода (диапазон регулирования, чувствительность) в основном определяются параметрами регулятора скорости, а динамические характеристики (форма переходных процессов при пуске, реверсе и торможении, реакция на возмущение по нагрузке) зависят от параметров регуляторов скорости и тока. В принципе на регуляторах реализуют самые различные законы управления, но чаще всего - пропорционально-интегральный (ПИ). Схемотехника регуляторов относительно проста - аналоговый интегральный усилитель с резистивно-емкостными обратными связями. Особенность регулятора скорости состоит в том, что он должен иметь малый собственный дрейф выходного напряжения, так как этот параметр определяет стабильность нижней скорости двигателя.
Узел токоограничения предохраняет двигатель от протекания по его обмоткам токов, которые могут вывести его из строя при пусках (торможениях) на большие скорости. Принцип работы узла заключается в сравнении истинного тока, протекающего в двигателе (сигнал с датчика тока), с допустимой величиной. Если сигнал датчика тока превышает допустимый, то на выходе регулятора тока уменьшается уровень сигнала и снижается величина напряжения, подаваемого с выхода тиристорного преобразователя на двигатель. В результате ток двигателя падает до допустимого уровня.
Узел токоограничения построен на аналоговых интегральных усилителях и резистивно-диодных цепях.
Датчик тока дает информацию о величине и направлении тока, протекающего через двигатель. Датчик тока состоит из измерительной (шунт, магнитодиоды, элементы Холла) и преобразовательной частей (магнитно-транзисторная и интегральная схемотехника). Требования к стабильности линейности и точности датчика тока не жесткие, но он должен быть помехоустойчив и обладать большим быстродействием. Кроме того, он должен гальванически разделять силовую часть преобразователя и систему управления.
Датчик скорости (тахогенератор) дает информацию о величине частоты и направлении вращения вала двигателя. Это специальная электрическая машина - тахогенератор, встроенная в двигатель. К датчику скорости предъявляются очень жесткие требования по крутизне, линейности, стабильности выходного напряжения и уровню его пульсаций. Параметры датчика скорости определяют как статические, так и динамические характеристики привода в целом.
Тахогенератор является неотъемлемой частью всех аналоговых регулируемых электроприводов для станков с ЧПУ и роботов.
Тиристорные электроприводы выпускаются комплектно. В комплект входят: силовой трансформатор (токоограничивающие реакторы), тиристорный преобразователь, уравнительные дроссели, двигатель со встроенным тахогенератором.
Двигатели, применяемые в станкостроении, существенно отличаются от двигателей общепромышленных серий.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'